 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe MiniMax-M2 Series: Mini Activations Unleashing Max Real-World Intelligence
May 26, 2026We introduce the MiniMax-M2 series, a family of Mixture-of-Experts language models built around the principle that mini activations can unleash maximum real-world intelligence. The flagship M2 contains 229.9B total parameters with only 9.8B activated per token. Designed end-to-end for agentic deployment, the M2 series rests on three components: (i) agent-driven data pipelines producing large-scale, verifiable trajectories across agentic coding and agentic cowork, each grounded in an executable workspace and an artifact-aligned reward; (ii) Forge, a scalable agent-native RL system that adapts to long-horizon agent trajectories, paired with windowed-FIFO scheduling, prefix-tree merging, inference optimization, and a clean training-inference-agent decoupling that supports both white-box and black-box agents; (iii) the latest M2.7 checkpoint takes an early step toward self-evolution -- autonomously debugging training runs and modifying its own scaffold. Across M2 through M2.7, this combination translates a mini-activation footprint into frontier-tier performance on agentic coding, deep search, office-task, and reasoning benchmarks.
CPMobius: Iterative Coach-Player Reasoning for Data-Free Reinforcement Learning
Feb 03, 2026Large Language Models (LLMs) have demonstrated strong potential in complex reasoning, yet their progress remains fundamentally constrained by reliance on massive high-quality human-curated tasks and labels, either through supervised fine-tuning (SFT) or reinforcement learning (RL) on reasoning-specific data. This dependence renders supervision-heavy training paradigms increasingly unsustainable, with signs of diminishing scalability already evident in practice. To overcome this limitation, we introduce CPMöbius (CPMobius), a collaborative Coach-Player paradigm for data-free reinforcement learning of reasoning models. Unlike traditional adversarial self-play, CPMöbius, inspired by real world human sports collaboration and multi-agent collaboration, treats the Coach and Player as independent but cooperative roles. The Coach proposes instructions targeted at the Player's capability and receives rewards based on changes in the Player's performance, while the Player is rewarded for solving the increasingly instructive tasks generated by the Coach. This cooperative optimization loop is designed to directly enhance the Player's mathematical reasoning ability. Remarkably, CPMöbius achieves substantial improvement without relying on any external training data, outperforming existing unsupervised approaches. For example, on Qwen2.5-Math-7B-Instruct, our method improves accuracy by an overall average of +4.9 and an out-of-distribution average of +5.4, exceeding RENT by +1.5 on overall accuracy and R-zero by +4.2 on OOD accuracy.
Seed-Prover 1.5: Mastering Undergraduate-Level Theorem Proving via Learning from Experience
Dec 19, 2025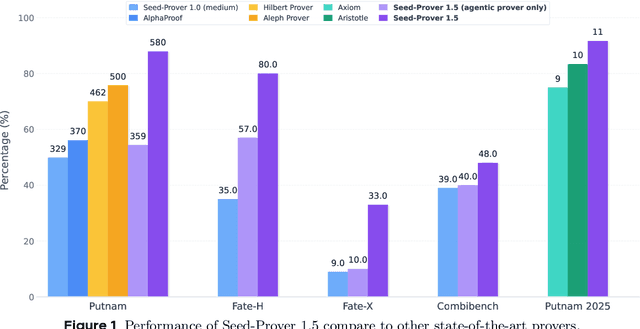
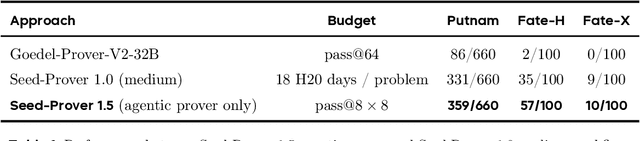
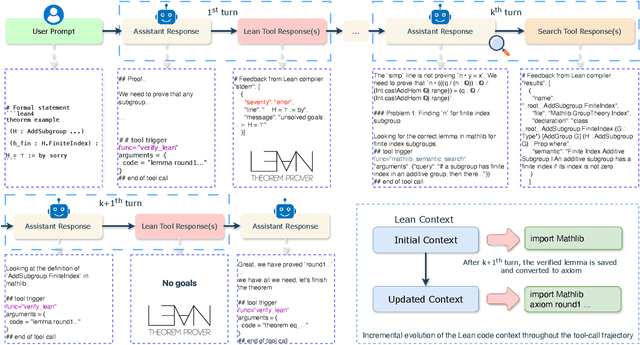
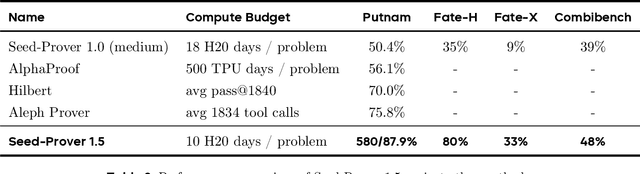
Large language models have recently made significant progress to generate rigorous mathematical proofs. In contrast, utilizing LLMs for theorem proving in formal languages (such as Lean) remains challenging and computationally expensive, particularly when addressing problems at the undergraduate level and beyond. In this work, we present \textbf{Seed-Prover 1.5}, a formal theorem-proving model trained via large-scale agentic reinforcement learning, alongside an efficient test-time scaling (TTS) workflow. Through extensive interactions with Lean and other tools, the model continuously accumulates experience during the RL process, substantially enhancing the capability and efficiency of formal theorem proving. Furthermore, leveraging recent advancements in natural language proving, our TTS workflow efficiently bridges the gap between natural and formal languages. Compared to state-of-the-art methods, Seed-Prover 1.5 achieves superior performance with a smaller compute budget. It solves \textbf{88\% of PutnamBench} (undergraduate-level), \textbf{80\% of Fate-H} (graduate-level), and \textbf{33\% of Fate-X} (PhD-level) problems. Notably, using our system, we solved \textbf{11 out of 12 problems} from Putnam 2025 within 9 hours. Our findings suggest that scaling learning from experience, driven by high-quality formal feedback, holds immense potential for the future of formal mathematical reasoning.
EmbodiedEval: Evaluate Multimodal LLMs as Embodied Agents
Jan 21, 2025



Multimodal Large Language Models (MLLMs) have shown significant advancements, providing a promising future for embodied agents. Existing benchmarks for evaluating MLLMs primarily utilize static images or videos, limiting assessments to non-interactive scenarios. Meanwhile, existing embodied AI benchmarks are task-specific and not diverse enough, which do not adequately evaluate the embodied capabilities of MLLMs. To address this, we propose EmbodiedEval, a comprehensive and interactive evaluation benchmark for MLLMs with embodied tasks. EmbodiedEval features 328 distinct tasks within 125 varied 3D scenes, each of which is rigorously selected and annotated. It covers a broad spectrum of existing embodied AI tasks with significantly enhanced diversity, all within a unified simulation and evaluation framework tailored for MLLMs. The tasks are organized into five categories: navigation, object interaction, social interaction, attribute question answering, and spatial question answering to assess different capabilities of the agents. We evaluated the state-of-the-art MLLMs on EmbodiedEval and found that they have a significant shortfall compared to human level on embodied tasks. Our analysis demonstrates the limitations of existing MLLMs in embodied capabilities, providing insights for their future development. We open-source all evaluation data and simulation framework at https://github.com/thunlp/EmbodiedEval.
Euclid: Supercharging Multimodal LLMs with Synthetic High-Fidelity Visual Descriptions
Dec 11, 2024Multimodal large language models (MLLMs) have made rapid progress in recent years, yet continue to struggle with low-level visual perception (LLVP) -- particularly the ability to accurately describe the geometric details of an image. This capability is crucial for applications in areas such as robotics, medical image analysis, and manufacturing. In this paper, we first introduce Geoperception, a benchmark designed to evaluate an MLLM's ability to accurately transcribe 2D geometric information from an image. Using this benchmark, we demonstrate the limitations of leading MLLMs, and then conduct a comprehensive empirical study to explore strategies for improving their performance on geometric tasks. Our findings highlight the benefits of certain model architectures, training techniques, and data strategies, including the use of high-fidelity synthetic data and multi-stage training with a data curriculum. Notably, we find that a data curriculum enables models to learn challenging geometry understanding tasks which they fail to learn from scratch. Leveraging these insights, we develop Euclid, a family of models specifically optimized for strong low-level geometric perception. Although purely trained on synthetic multimodal data, Euclid shows strong generalization ability to novel geometry shapes. For instance, Euclid outperforms the best closed-source model, Gemini-1.5-Pro, by up to 58.56% on certain Geoperception benchmark tasks and 10.65% on average across all tasks.
ACDiT: Interpolating Autoregressive Conditional Modeling and Diffusion Transformer
Dec 10, 2024The recent surge of interest in comprehensive multimodal models has necessitated the unification of diverse modalities. However, the unification suffers from disparate methodologies. Continuous visual generation necessitates the full-sequence diffusion-based approach, despite its divergence from the autoregressive modeling in the text domain. We posit that autoregressive modeling, i.e., predicting the future based on past deterministic experience, remains crucial in developing both a visual generation model and a potential unified multimodal model. In this paper, we explore an interpolation between the autoregressive modeling and full-parameters diffusion to model visual information. At its core, we present ACDiT, an Autoregressive blockwise Conditional Diffusion Transformer, where the block size of diffusion, i.e., the size of autoregressive units, can be flexibly adjusted to interpolate between token-wise autoregression and full-sequence diffusion. ACDiT is easy to implement, as simple as creating a Skip-Causal Attention Mask (SCAM) during training. During inference, the process iterates between diffusion denoising and autoregressive decoding that can make full use of KV-Cache. We verify the effectiveness of ACDiT on image and video generation tasks. We also demonstrate that benefitted from autoregressive modeling, ACDiT can be seamlessly used in visual understanding tasks despite being trained on the diffusion objective. The analysis of the trade-off between autoregressive modeling and diffusion demonstrates the potential of ACDiT to be used in long-horizon visual generation tasks. These strengths make it promising as the backbone of future unified models.
NVILA: Efficient Frontier Visual Language Models
Dec 05, 2024
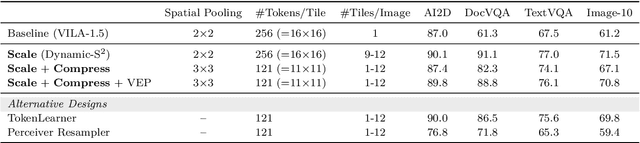
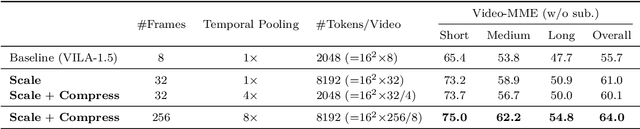
Visual language models (VLMs) have made significant advances in accuracy in recent years. However, their efficiency has received much less attention. This paper introduces NVILA, a family of open VLMs designed to optimize both efficiency and accuracy. Building on top of VILA, we improve its model architecture by first scaling up the spatial and temporal resolutions, and then compressing visual tokens. This "scale-then-compress" approach enables NVILA to efficiently process high-resolution images and long videos. We also conduct a systematic investigation to enhance the efficiency of NVILA throughout its entire lifecycle, from training and fine-tuning to deployment. NVILA matches or surpasses the accuracy of many leading open and proprietary VLMs across a wide range of image and video benchmarks. At the same time, it reduces training costs by 4.5X, fine-tuning memory usage by 3.4X, pre-filling latency by 1.6-2.2X, and decoding latency by 1.2-2.8X. We will soon make our code and models available to facilitate reproducibility.
AdaNAT: Exploring Adaptive Policy for Token-Based Image Generation
Aug 31, 2024



Recent studies have demonstrated the effectiveness of token-based methods for visual content generation. As a representative work, non-autoregressive Transformers (NATs) are able to synthesize images with decent quality in a small number of steps. However, NATs usually necessitate configuring a complicated generation policy comprising multiple manually-designed scheduling rules. These heuristic-driven rules are prone to sub-optimality and come with the requirements of expert knowledge and labor-intensive efforts. Moreover, their one-size-fits-all nature cannot flexibly adapt to the diverse characteristics of each individual sample. To address these issues, we propose AdaNAT, a learnable approach that automatically configures a suitable policy tailored for every sample to be generated. In specific, we formulate the determination of generation policies as a Markov decision process. Under this framework, a lightweight policy network for generation can be learned via reinforcement learning. Importantly, we demonstrate that simple reward designs such as FID or pre-trained reward models, may not reliably guarantee the desired quality or diversity of generated samples. Therefore, we propose an adversarial reward design to guide the training of policy networks effectively. Comprehensive experiments on four benchmark datasets, i.e., ImageNet-256 & 512, MS-COCO, and CC3M, validate the effectiveness of AdaNAT. Code and pre-trained models will be released at https://github.com/LeapLabTHU/AdaNAT.
GUICourse: From General Vision Language Models to Versatile GUI Agents
Jun 17, 2024
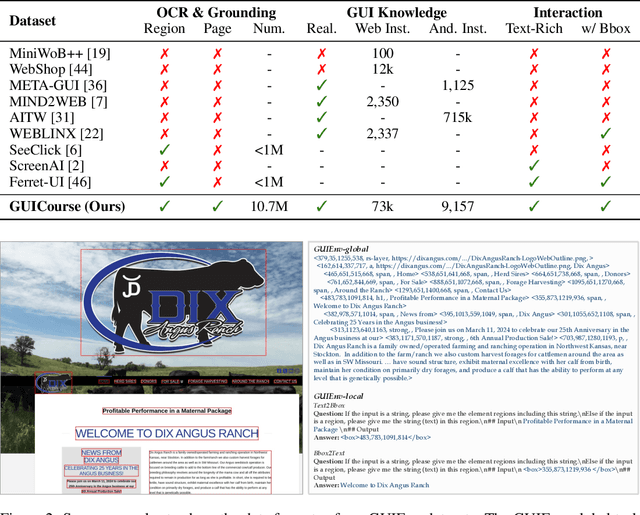
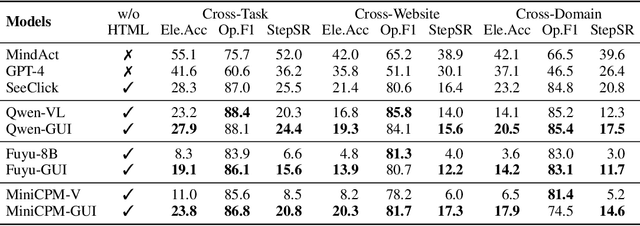
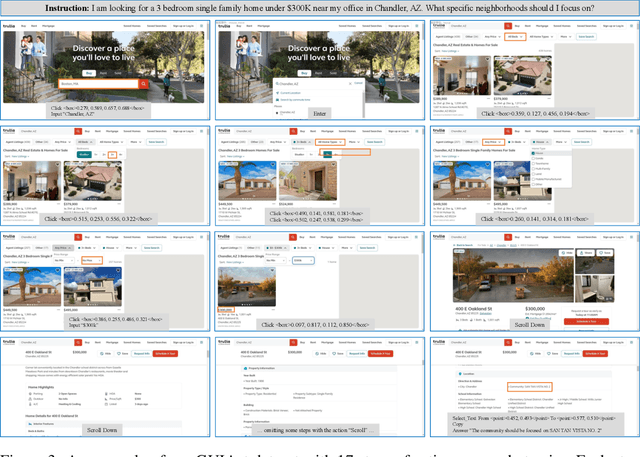
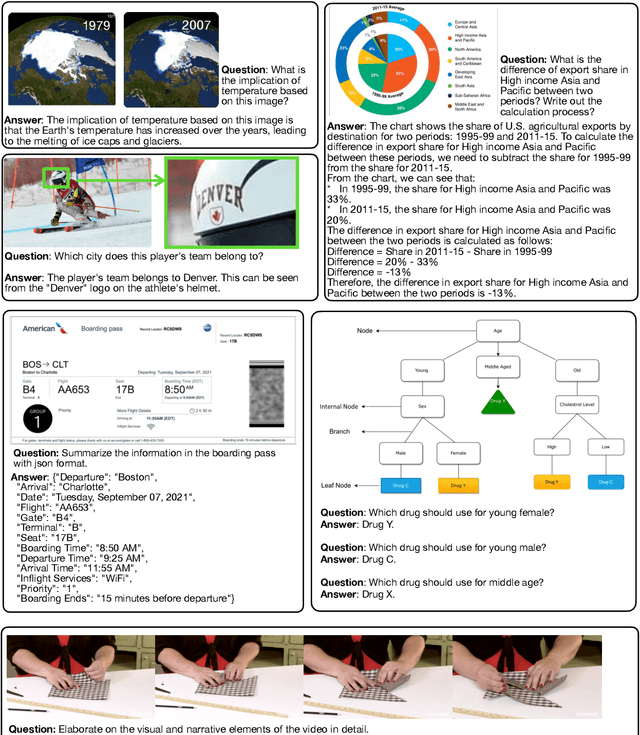
Utilizing Graphic User Interface (GUI) for human-computer interaction is essential for accessing a wide range of digital tools. Recent advancements in Vision Language Models (VLMs) highlight the compelling potential to develop versatile agents to help humans finish GUI navigation tasks. However, current VLMs are challenged in terms of fundamental abilities (OCR and grounding) and GUI knowledge (the functions and control methods of GUI elements), preventing them from becoming practical GUI agents. To solve these challenges, we contribute GUICourse, a suite of datasets to train visual-based GUI agents from general VLMs. First, we introduce the GUIEnv dataset to strengthen the OCR and grounding capabilities of VLMs. Then, we introduce the GUIAct and GUIChat datasets to enrich their knowledge of GUI components and interactions. Experiments demonstrate that our GUI agents have better performance on common GUI tasks than their baseline VLMs. Even the small-size GUI agent (with 3.1B parameters) can still work well on single-step and multi-step GUI tasks. Finally, we analyze the different varieties in the training stage of this agent by ablation study. Our source codes and datasets are released at https://github.com/yiye3/GUICourse.
Revisiting Non-Autoregressive Transformers for Efficient Image Synthesis
Jun 08, 2024



The field of image synthesis is currently flourishing due to the advancements in diffusion models. While diffusion models have been successful, their computational intensity has prompted the pursuit of more efficient alternatives. As a representative work, non-autoregressive Transformers (NATs) have been recognized for their rapid generation. However, a major drawback of these models is their inferior performance compared to diffusion models. In this paper, we aim to re-evaluate the full potential of NATs by revisiting the design of their training and inference strategies. Specifically, we identify the complexities in properly configuring these strategies and indicate the possible sub-optimality in existing heuristic-driven designs. Recognizing this, we propose to go beyond existing methods by directly solving the optimal strategies in an automatic framework. The resulting method, named AutoNAT, advances the performance boundaries of NATs notably, and is able to perform comparably with the latest diffusion models at a significantly reduced inference cost. The effectiveness of AutoNAT is validated on four benchmark datasets, i.e., ImageNet-256 & 512, MS-COCO, and CC3M. Our code is available at https://github.com/LeapLabTHU/ImprovedNAT.