 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoGLM: Autonomous Foundation Agents for GUIs
Oct 28, 2024



We present AutoGLM, a new series in the ChatGLM family, designed to serve as foundation agents for autonomous control of digital devices through Graphical User Interfaces (GUIs). While foundation models excel at acquiring human knowledge, they often struggle with decision-making in dynamic real-world environments, limiting their progress toward artificial general intelligence. This limitation underscores the importance of developing foundation agents capable of learning through autonomous environmental interactions by reinforcing existing models. Focusing on Web Browser and Phone as representative GUI scenarios, we have developed AutoGLM as a practical foundation agent system for real-world GUI interactions. Our approach integrates a comprehensive suite of techniques and infrastructures to create deployable agent systems suitable for user delivery. Through this development, we have derived two key insights: First, the design of an appropriate "intermediate interface" for GUI control is crucial, enabling the separation of planning and grounding behaviors, which require distinct optimization for flexibility and accuracy respectively. Second, we have developed a novel progressive training framework that enables self-evolving online curriculum reinforcement learning for AutoGLM. Our evaluations demonstrate AutoGLM's effectiveness across multiple domains. For web browsing, AutoGLM achieves a 55.2% success rate on VAB-WebArena-Lite (improving to 59.1% with a second attempt) and 96.2% on OpenTable evaluation tasks. In Android device control, AutoGLM attains a 36.2% success rate on AndroidLab (VAB-Mobile) and 89.7% on common tasks in popular Chinese APPs.
VisualAgentBench: Towards Large Multimodal Models as Visual Foundation Agents
Aug 12, 2024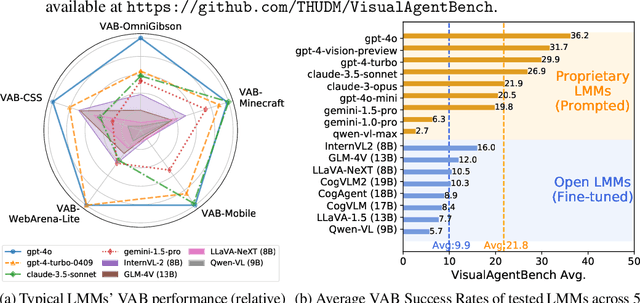
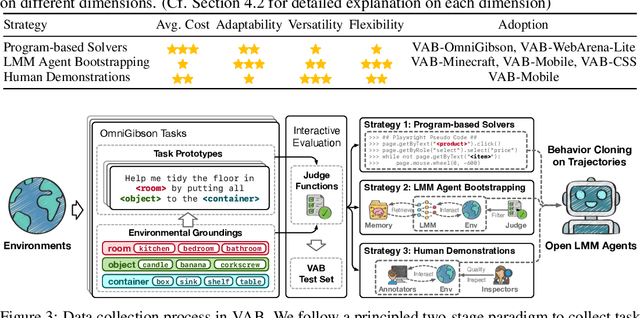
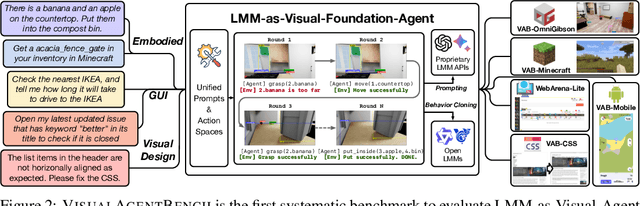
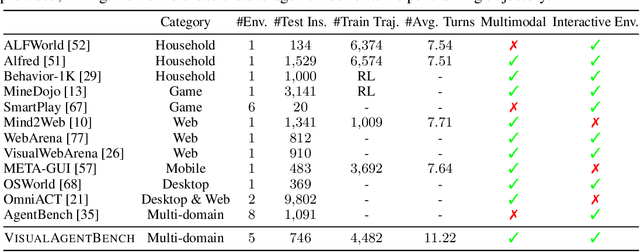
Large Multimodal Models (LMMs) have ushered in a new era in artificial intelligence, merging capabilities in both language and vision to form highly capable Visual Foundation Agents. These agents are postulated to excel across a myriad of tasks, potentially approaching general artificial intelligence. However, existing benchmarks fail to sufficiently challenge or showcase the full potential of LMMs in complex, real-world environments. To address this gap, we introduce VisualAgentBench (VAB), a comprehensive and pioneering benchmark specifically designed to train and evaluate LMMs as visual foundation agents across diverse scenarios, including Embodied, Graphical User Interface, and Visual Design, with tasks formulated to probe the depth of LMMs' understanding and interaction capabilities. Through rigorous testing across nine proprietary LMM APIs and eight open models, we demonstrate the considerable yet still developing agent capabilities of these models. Additionally, VAB constructs a trajectory training set constructed through hybrid methods including Program-based Solvers, LMM Agent Bootstrapping, and Human Demonstrations, promoting substantial performance improvements in LMMs through behavior cloning. Our work not only aims to benchmark existing models but also provides a solid foundation for future development into visual foundation agents. Code, train \& test data, and part of fine-tuned open LMMs are available at \url{https://github.com/THUDM/VisualAgentBench}.
ChatGLM: A Family of Large Language Models from GLM-130B to GLM-4 All Tools
Jun 18, 2024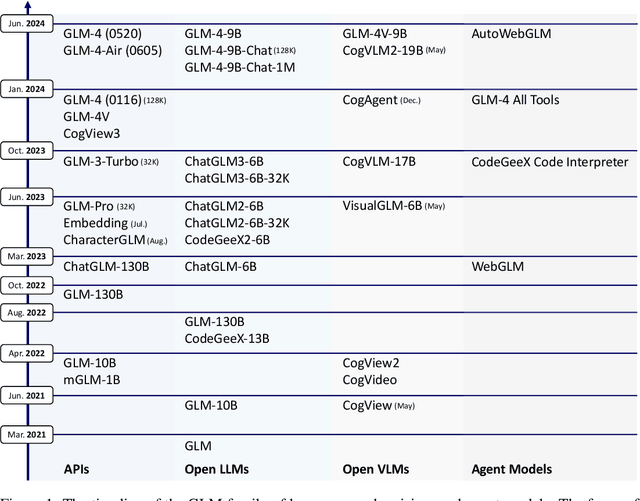
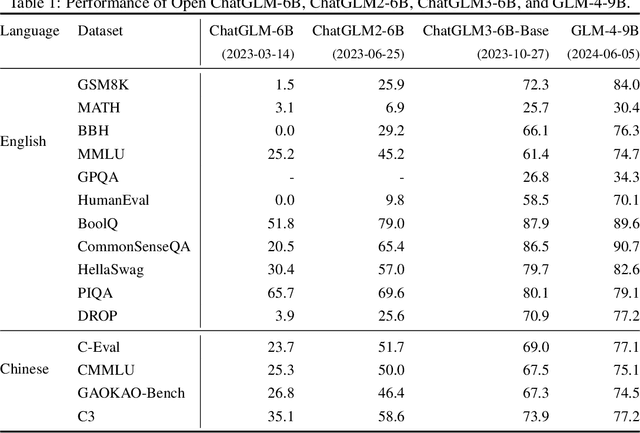
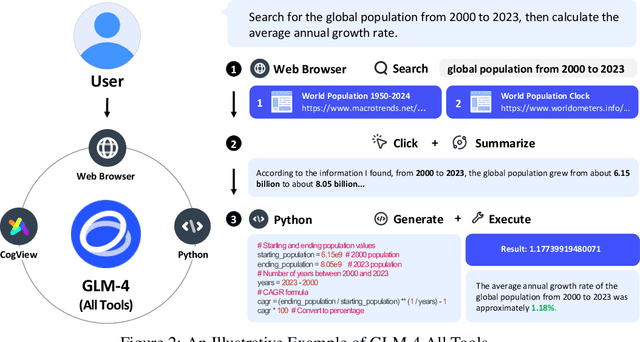
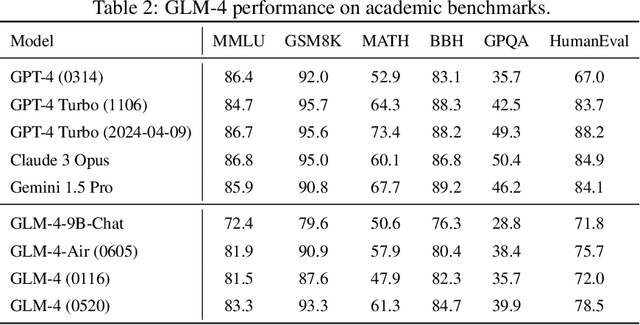
We introduce ChatGLM, an evolving family of large language models that we have been developing over time. This report primarily focuses on the GLM-4 language series, which includes GLM-4, GLM-4-Air, and GLM-4-9B. They represent our most capable models that are trained with all the insights and lessons gained from the preceding three generations of ChatGLM. To date, the GLM-4 models are pre-trained on ten trillions of tokens mostly in Chinese and English, along with a small set of corpus from 24 languages, and aligned primarily for Chinese and English usage. The high-quality alignment is achieved via a multi-stage post-training process, which involves supervised fine-tuning and learning from human feedback. Evaluations show that GLM-4 1) closely rivals or outperforms GPT-4 in terms of general metrics such as MMLU, GSM8K, MATH, BBH, GPQA, and HumanEval, 2) gets close to GPT-4-Turbo in instruction following as measured by IFEval, 3) matches GPT-4 Turbo (128K) and Claude 3 for long context tasks, and 4) outperforms GPT-4 in Chinese alignments as measured by AlignBench. The GLM-4 All Tools model is further aligned to understand user intent and autonomously decide when and which tool(s) touse -- including web browser, Python interpreter, text-to-image model, and user-defined functions -- to effectively complete complex tasks. In practical applications, it matches and even surpasses GPT-4 All Tools in tasks like accessing online information via web browsing and solving math problems using Python interpreter. Over the course, we have open-sourced a series of models, including ChatGLM-6B (three generations), GLM-4-9B (128K, 1M), GLM-4V-9B, WebGLM, and CodeGeeX, attracting over 10 million downloads on Hugging face in the year 2023 alone. The open models can be accessed through https://github.com/THUDM and https://huggingface.co/THUDM.
NaturalCodeBench: Examining Coding Performance Mismatch on HumanEval and Natural User Prompts
May 07, 2024Large language models (LLMs) have manifested strong ability to generate codes for productive activities. However, current benchmarks for code synthesis, such as HumanEval, MBPP, and DS-1000, are predominantly oriented towards introductory tasks on algorithm and data science, insufficiently satisfying challenging requirements prevalent in real-world coding. To fill this gap, we propose NaturalCodeBench (NCB), a challenging code benchmark designed to mirror the complexity and variety of scenarios in real coding tasks. NCB comprises 402 high-quality problems in Python and Java, meticulously selected from natural user queries from online coding services, covering 6 different domains. Noting the extraordinary difficulty in creating testing cases for real-world queries, we also introduce a semi-automated pipeline to enhance the efficiency of test case construction. Comparing with manual solutions, it achieves an efficiency increase of more than 4 times. Our systematic experiments on 39 LLMs find that performance gaps on NCB between models with close HumanEval scores could still be significant, indicating a lack of focus on practical code synthesis scenarios or over-specified optimization on HumanEval. On the other hand, even the best-performing GPT-4 is still far from satisfying on NCB. The evaluation toolkit and development set are available at https://github.com/THUDM/NaturalCodeBench.
STOPNet: Multiview-based 6-DoF Suction Detection for Transparent Objects on Production Lines
Oct 09, 2023



In this work, we present STOPNet, a framework for 6-DoF object suction detection on production lines, with a focus on but not limited to transparent objects, which is an important and challenging problem in robotic systems and modern industry. Current methods requiring depth input fail on transparent objects due to depth cameras' deficiency in sensing their geometry, while we proposed a novel framework to reconstruct the scene on the production line depending only on RGB input, based on multiview stereo. Compared to existing works, our method not only reconstructs the whole 3D scene in order to obtain high-quality 6-DoF suction poses in real time but also generalizes to novel environments, novel arrangements and novel objects, including challenging transparent objects, both in simulation and the real world. Extensive experiments in simulation and the real world show that our method significantly surpasses the baselines and has better generalizability, which caters to practical industrial needs.