 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSky Background Building of Multi-objective Fiber spectra Based on Mutual Information Network
Aug 27, 2025Sky background subtraction is a critical step in Multi-objective Fiber spectra process. However, current subtraction relies mainly on sky fiber spectra to build Super Sky. These average spectra are lacking in the modeling of the environment surrounding the objects. To address this issue, a sky background estimation model: Sky background building based on Mutual Information (SMI) is proposed. SMI based on mutual information and incremental training approach. It utilizes spectra from all fibers in the plate to estimate the sky background. SMI contains two main networks, the first network applies a wavelength calibration module to extract sky features from spectra, and can effectively solve the feature shift problem according to the corresponding emission position. The second network employs an incremental training approach to maximize mutual information between representations of different spectra to capturing the common component. Then, it minimizes the mutual information between adjoining spectra representations to obtain individual components. This network yields an individual sky background at each location of the object. To verify the effectiveness of the method in this paper, we conducted experiments on the spectra of LAMOST. Results show that SMI can obtain a better object sky background during the observation, especially in the blue end.
STOPNet: Multiview-based 6-DoF Suction Detection for Transparent Objects on Production Lines
Oct 09, 2023



In this work, we present STOPNet, a framework for 6-DoF object suction detection on production lines, with a focus on but not limited to transparent objects, which is an important and challenging problem in robotic systems and modern industry. Current methods requiring depth input fail on transparent objects due to depth cameras' deficiency in sensing their geometry, while we proposed a novel framework to reconstruct the scene on the production line depending only on RGB input, based on multiview stereo. Compared to existing works, our method not only reconstructs the whole 3D scene in order to obtain high-quality 6-DoF suction poses in real time but also generalizes to novel environments, novel arrangements and novel objects, including challenging transparent objects, both in simulation and the real world. Extensive experiments in simulation and the real world show that our method significantly surpasses the baselines and has better generalizability, which caters to practical industrial needs.
NeuS2: Fast Learning of Neural Implicit Surfaces for Multi-view Reconstruction
Dec 10, 2022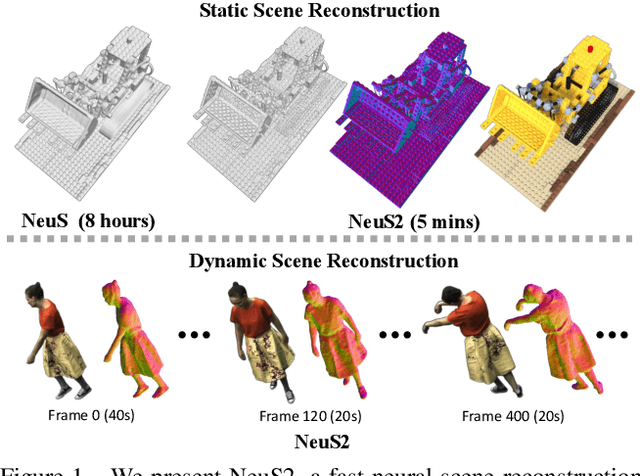



Recent methods for neural surface representation and rendering, for example NeuS, have demonstrated remarkably high-quality reconstruction of static scenes. However, the training of NeuS takes an extremely long time (8 hours), which makes it almost impossible to apply them to dynamic scenes with thousands of frames. We propose a fast neural surface reconstruction approach, called NeuS2, which achieves two orders of magnitude improvement in terms of acceleration without compromising reconstruction quality. To accelerate the training process, we integrate multi-resolution hash encodings into a neural surface representation and implement our whole algorithm in CUDA. We also present a lightweight calculation of second-order derivatives tailored to our networks (i.e., ReLU-based MLPs), which achieves a factor two speed up. To further stabilize training, a progressive learning strategy is proposed to optimize multi-resolution hash encodings from coarse to fine. In addition, we extend our method for reconstructing dynamic scenes with an incremental training strategy. Our experiments on various datasets demonstrate that NeuS2 significantly outperforms the state-of-the-arts in both surface reconstruction accuracy and training speed. The video is available at https://vcai.mpi-inf.mpg.de/projects/NeuS2/ .