 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWebRL: Training LLM Web Agents via Self-Evolving Online Curriculum Reinforcement Learning
Nov 04, 2024



Large language models (LLMs) have shown remarkable potential as autonomous agents, particularly in web-based tasks. However, existing LLM web agents heavily rely on expensive proprietary LLM APIs, while open LLMs lack the necessary decision-making capabilities. This paper introduces WebRL, a self-evolving online curriculum reinforcement learning framework designed to train high-performance web agents using open LLMs. WebRL addresses three key challenges in building LLM web agents, including the scarcity of training tasks, sparse feedback signals, and policy distribution drift in online learning. Specifically, WebRL incorporates 1) a self-evolving curriculum that generates new tasks from unsuccessful attempts, 2) a robust outcome-supervised reward model (ORM), and 3) adaptive reinforcement learning strategies to ensure consistent improvements. We apply WebRL to transform open Llama-3.1 and GLM-4 models into proficient web agents. On WebArena-Lite, WebRL improves the success rate of Llama-3.1-8B from 4.8% to 42.4%, and from 6.1% to 43% for GLM-4-9B. These open models significantly surpass the performance of GPT-4-Turbo (17.6%) and GPT-4o (13.9%) and outperform previous state-of-the-art web agents trained on open LLMs (AutoWebGLM, 18.2%). Our findings demonstrate WebRL's effectiveness in bridging the gap between open and proprietary LLM-based web agents, paving the way for more accessible and powerful autonomous web interaction systems.
VisualAgentBench: Towards Large Multimodal Models as Visual Foundation Agents
Aug 12, 2024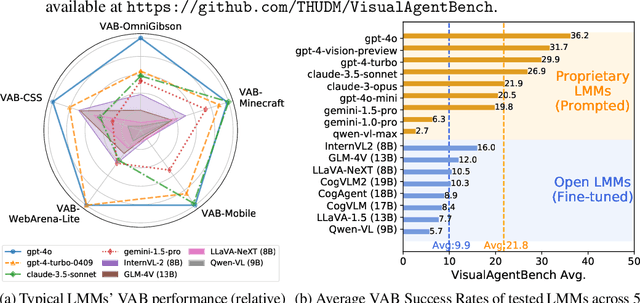
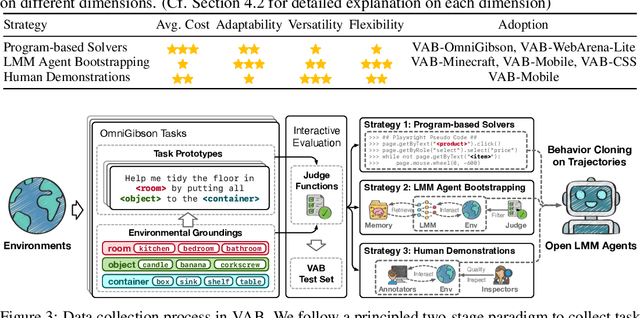
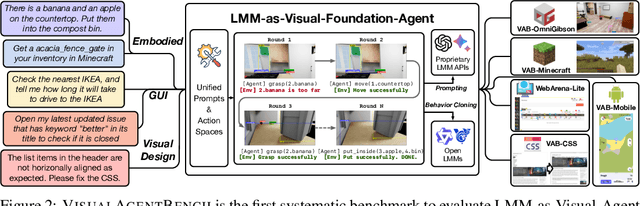
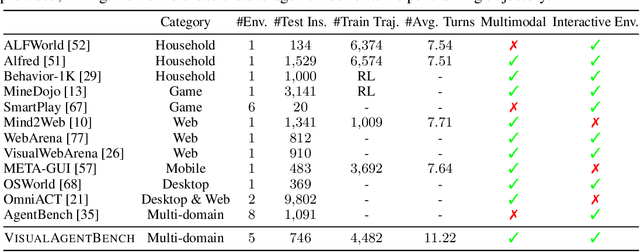
Large Multimodal Models (LMMs) have ushered in a new era in artificial intelligence, merging capabilities in both language and vision to form highly capable Visual Foundation Agents. These agents are postulated to excel across a myriad of tasks, potentially approaching general artificial intelligence. However, existing benchmarks fail to sufficiently challenge or showcase the full potential of LMMs in complex, real-world environments. To address this gap, we introduce VisualAgentBench (VAB), a comprehensive and pioneering benchmark specifically designed to train and evaluate LMMs as visual foundation agents across diverse scenarios, including Embodied, Graphical User Interface, and Visual Design, with tasks formulated to probe the depth of LMMs' understanding and interaction capabilities. Through rigorous testing across nine proprietary LMM APIs and eight open models, we demonstrate the considerable yet still developing agent capabilities of these models. Additionally, VAB constructs a trajectory training set constructed through hybrid methods including Program-based Solvers, LMM Agent Bootstrapping, and Human Demonstrations, promoting substantial performance improvements in LMMs through behavior cloning. Our work not only aims to benchmark existing models but also provides a solid foundation for future development into visual foundation agents. Code, train \& test data, and part of fine-tuned open LMMs are available at \url{https://github.com/THUDM/VisualAgentBench}.
An Expert is Worth One Token: Synergizing Multiple Expert LLMs as Generalist via Expert Token Routing
Mar 25, 2024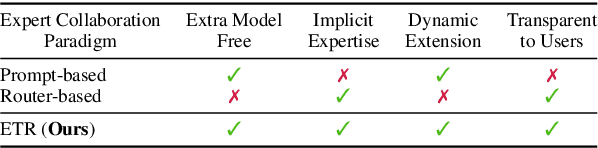
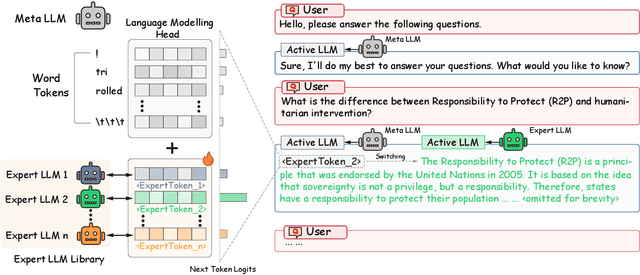
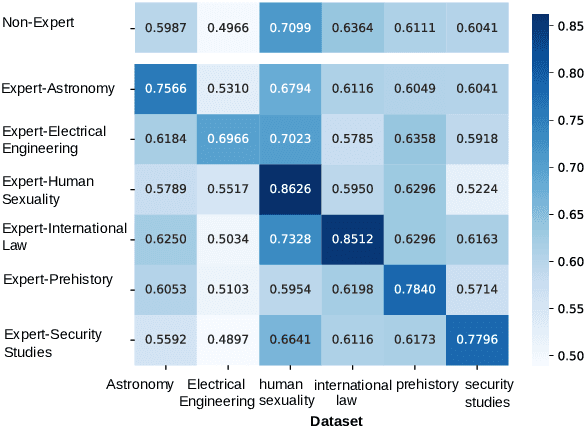
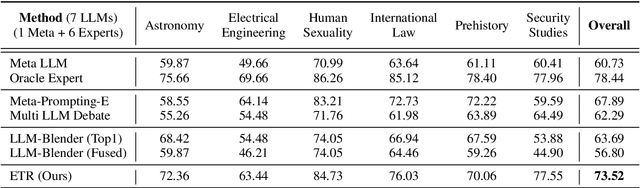
We present Expert-Token-Routing, a unified generalist framework that facilitates seamless integration of multiple expert LLMs. Our framework represents expert LLMs as special expert tokens within the vocabulary of a meta LLM. The meta LLM can route to an expert LLM like generating new tokens. Expert-Token-Routing not only supports learning the implicit expertise of expert LLMs from existing instruction dataset but also allows for dynamic extension of new expert LLMs in a plug-and-play manner. It also conceals the detailed collaboration process from the user's perspective, facilitating interaction as though it were a singular LLM. Our framework outperforms various existing multi-LLM collaboration paradigms across benchmarks that incorporate six diverse expert domains, demonstrating effectiveness and robustness in building generalist LLM system via synergizing multiple expert LLMs.
GraphLLM: Boosting Graph Reasoning Ability of Large Language Model
Oct 09, 2023



The advancement of Large Language Models (LLMs) has remarkably pushed the boundaries towards artificial general intelligence (AGI), with their exceptional ability on understanding diverse types of information, including but not limited to images and audio. Despite this progress, a critical gap remains in empowering LLMs to proficiently understand and reason on graph data. Recent studies underscore LLMs' underwhelming performance on fundamental graph reasoning tasks. In this paper, we endeavor to unearth the obstacles that impede LLMs in graph reasoning, pinpointing the common practice of converting graphs into natural language descriptions (Graph2Text) as a fundamental bottleneck. To overcome this impediment, we introduce GraphLLM, a pioneering end-to-end approach that synergistically integrates graph learning models with LLMs. This synergy equips LLMs with the ability to proficiently interpret and reason on graph data, harnessing the superior expressive power of graph learning models. Our empirical evaluations across four fundamental graph reasoning tasks validate the effectiveness of GraphLLM. The results exhibit a substantial average accuracy enhancement of 54.44%, alongside a noteworthy context reduction of 96.45% across various graph reasoning tasks.
The 1st Data Science for Pavements Challenge
Jun 10, 2022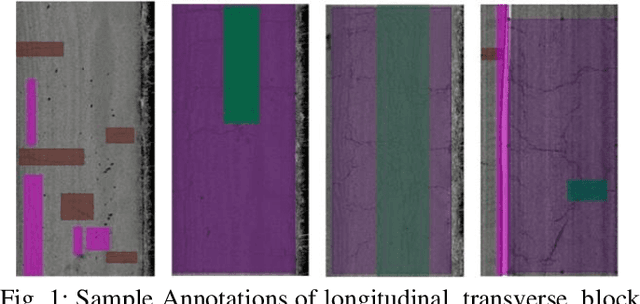

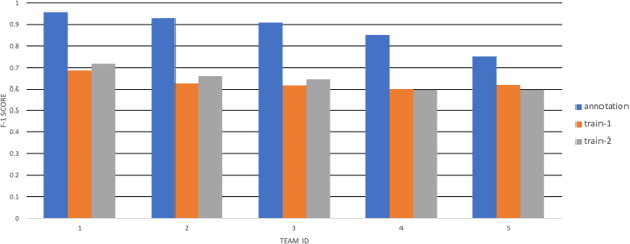
The Data Science for Pavement Challenge (DSPC) seeks to accelerate the research and development of automated vision systems for pavement condition monitoring and evaluation by providing a platform with benchmarked datasets and codes for teams to innovate and develop machine learning algorithms that are practice-ready for use by industry. The first edition of the competition attracted 22 teams from 8 countries. Participants were required to automatically detect and classify different types of pavement distresses present in images captured from multiple sources, and under different conditions. The competition was data-centric: teams were tasked to increase the accuracy of a predefined model architecture by utilizing various data modification methods such as cleaning, labeling and augmentation. A real-time, online evaluation system was developed to rank teams based on the F1 score. Leaderboard results showed the promise and challenges of machine for advancing automation in pavement monitoring and evaluation. This paper summarizes the solutions from the top 5 teams. These teams proposed innovations in the areas of data cleaning, annotation, augmentation, and detection parameter tuning. The F1 score for the top-ranked team was approximately 0.9. The paper concludes with a review of different experiments that worked well for the current challenge and those that did not yield any significant improvement in model accuracy.