 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearned Slip-Detection-Severity Framework using Tactile Deformation Field Feedback for Robotic Manipulation
Nov 11, 2024Safely handling objects and avoiding slippage are fundamental challenges in robotic manipulation, yet traditional techniques often oversimplify the issue by treating slippage as a binary occurrence. Our research presents a framework that both identifies slip incidents and measures their severity. We introduce a set of features based on detailed vector field analysis of tactile deformation data captured by the GelSight Mini sensor. Two distinct machine learning models use these features: one focuses on slip detection, and the other evaluates the slip's severity, which is the slipping velocity of the object against the sensor surface. Our slip detection model achieves an average accuracy of 92%, and the slip severity estimation model exhibits a mean absolute error (MAE) of 0.6 cm/s for unseen objects. To demonstrate the synergistic approach of this framework, we employ both the models in a tactile feedback-guided vertical sliding task. Leveraging the high accuracy of slip detection, we utilize it as the foundational and corrective model and integrate the slip severity estimation into the feedback control loop to address slips without overcompensating.
Context and Geometry Aware Voxel Transformer for Semantic Scene Completion
May 22, 2024



Vision-based Semantic Scene Completion (SSC) has gained much attention due to its widespread applications in various 3D perception tasks. Existing sparse-to-dense approaches typically employ shared context-independent queries across various input images, which fails to capture distinctions among them as the focal regions of different inputs vary and may result in undirected feature aggregation of cross-attention. Additionally, the absence of depth information may lead to points projected onto the image plane sharing the same 2D position or similar sampling points in the feature map, resulting in depth ambiguity. In this paper, we present a novel context and geometry aware voxel transformer. It utilizes a context aware query generator to initialize context-dependent queries tailored to individual input images, effectively capturing their unique characteristics and aggregating information within the region of interest. Furthermore, it extend deformable cross-attention from 2D to 3D pixel space, enabling the differentiation of points with similar image coordinates based on their depth coordinates. Building upon this module, we introduce a neural network named CGFormer to achieve semantic scene completion. Simultaneously, CGFormer leverages multiple 3D representations (i.e., voxel and TPV) to boost the semantic and geometric representation abilities of the transformed 3D volume from both local and global perspectives. Experimental results demonstrate that CGFormer achieves state-of-the-art performance on the SemanticKITTI and SSCBench-KITTI-360 benchmarks, attaining a mIoU of 16.87 and 20.05, as well as an IoU of 45.99 and 48.07, respectively. Remarkably, CGFormer even outperforms approaches employing temporal images as inputs or much larger image backbone networks. Code for the proposed method is available at https://github.com/pkqbajng/CGFormer.
GraphLLM: Boosting Graph Reasoning Ability of Large Language Model
Oct 09, 2023



The advancement of Large Language Models (LLMs) has remarkably pushed the boundaries towards artificial general intelligence (AGI), with their exceptional ability on understanding diverse types of information, including but not limited to images and audio. Despite this progress, a critical gap remains in empowering LLMs to proficiently understand and reason on graph data. Recent studies underscore LLMs' underwhelming performance on fundamental graph reasoning tasks. In this paper, we endeavor to unearth the obstacles that impede LLMs in graph reasoning, pinpointing the common practice of converting graphs into natural language descriptions (Graph2Text) as a fundamental bottleneck. To overcome this impediment, we introduce GraphLLM, a pioneering end-to-end approach that synergistically integrates graph learning models with LLMs. This synergy equips LLMs with the ability to proficiently interpret and reason on graph data, harnessing the superior expressive power of graph learning models. Our empirical evaluations across four fundamental graph reasoning tasks validate the effectiveness of GraphLLM. The results exhibit a substantial average accuracy enhancement of 54.44%, alongside a noteworthy context reduction of 96.45% across various graph reasoning tasks.
Learning to Detect Slip through Tactile Measures of the Contact Force Field and its Entropy
Mar 03, 2023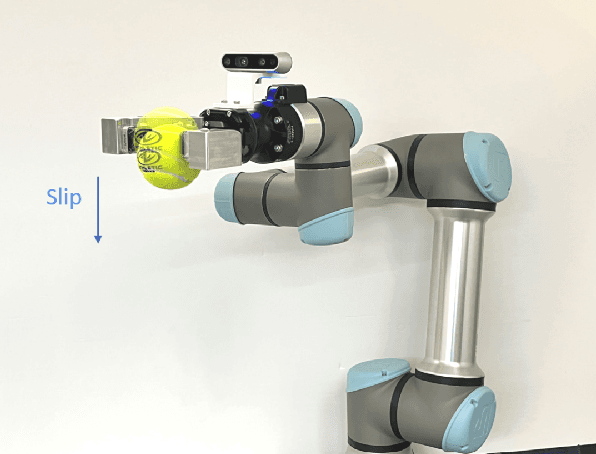

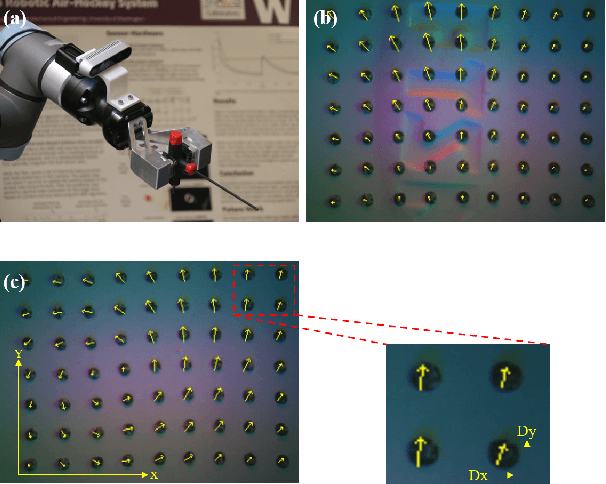

Detection of slip during object grasping and manipulation plays a vital role in object handling. Existing solutions largely depend on visual information to devise a strategy for grasping. Nonetheless, in order to achieve proficiency akin to humans and achieve consistent grasping and manipulation of unfamiliar objects, the incorporation of artificial tactile sensing has become a necessity in robotic systems. In this work, we propose a novel physics-informed, data-driven method to detect slip continuously in real time. The GelSight Mini, an optical tactile sensor, is mounted on custom grippers to acquire tactile readings. Our work leverages the inhomogeneity of tactile sensor readings during slip events to develop distinctive features and formulates slip detection as a classification problem. To evaluate our approach, we test multiple data-driven models on 10 common objects under different loading conditions, textures, and materials. Our results show that the best classification algorithm achieves an average accuracy of 99%. We demonstrate the application of this work in a dynamic robotic manipulation task in which real-time slip detection and prevention algorithm is implemented.