 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Detect Slip through Tactile Measures of the Contact Force Field and its Entropy
Mar 03, 2023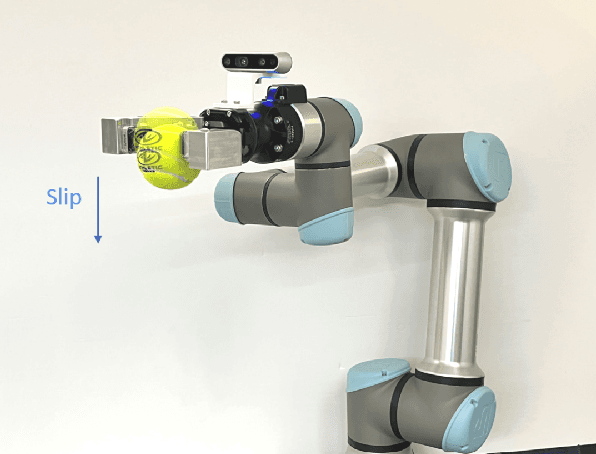

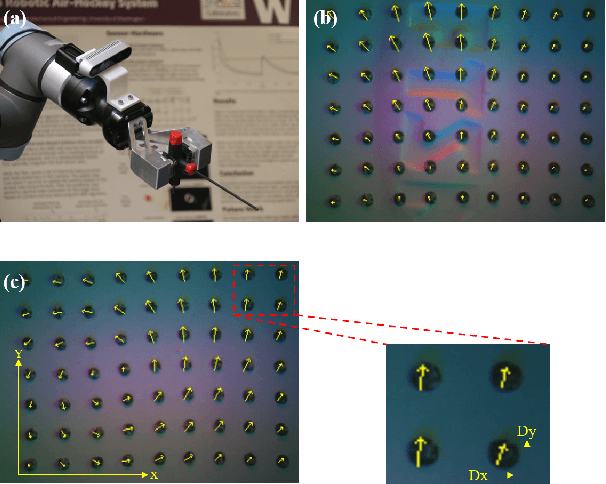

Detection of slip during object grasping and manipulation plays a vital role in object handling. Existing solutions largely depend on visual information to devise a strategy for grasping. Nonetheless, in order to achieve proficiency akin to humans and achieve consistent grasping and manipulation of unfamiliar objects, the incorporation of artificial tactile sensing has become a necessity in robotic systems. In this work, we propose a novel physics-informed, data-driven method to detect slip continuously in real time. The GelSight Mini, an optical tactile sensor, is mounted on custom grippers to acquire tactile readings. Our work leverages the inhomogeneity of tactile sensor readings during slip events to develop distinctive features and formulates slip detection as a classification problem. To evaluate our approach, we test multiple data-driven models on 10 common objects under different loading conditions, textures, and materials. Our results show that the best classification algorithm achieves an average accuracy of 99%. We demonstrate the application of this work in a dynamic robotic manipulation task in which real-time slip detection and prevention algorithm is implemented.