 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Edit Knowledge via Instruction-based Chain-of-Thought Prompting
Apr 07, 2026Large language models (LLMs) can effectively handle outdated information through knowledge editing. However, current approaches face two key limitations: (I) Poor generalization: Most approaches rigidly inject new knowledge without ensuring that the model can use it effectively to solve practical problems. (II) Narrow scope: Current methods focus primarily on structured fact triples, overlooking the diverse unstructured forms of factual information (e.g., news, articles) prevalent in real-world contexts. To address these challenges, we propose a new paradigm: teaching LLMs to edit knowledge via Chain of Thoughts (CoTs) reasoning (CoT2Edit). We first leverage language model agents for both structured and unstructured edited data to generate CoTs, building high-quality instruction data. The model is then trained to reason over edited knowledge through supervised fine-tuning (SFT) and Group Relative Policy Optimization (GRPO). At inference time, we integrate Retrieval-Augmented Generation (RAG) to dynamically retrieve relevant edited facts for real-time knowledge editing. Experimental results demonstrate that our method achieves strong generalization across six diverse knowledge editing scenarios with just a single round of training on three open-source language models. The codes are available at https://github.com/FredJDean/CoT2Edit.
ComputerRL: Scaling End-to-End Online Reinforcement Learning for Computer Use Agents
Aug 19, 2025We introduce ComputerRL, a framework for autonomous desktop intelligence that enables agents to operate complex digital workspaces skillfully. ComputerRL features the API-GUI paradigm, which unifies programmatic API calls and direct GUI interaction to address the inherent mismatch between machine agents and human-centric desktop environments. Scaling end-to-end RL training is crucial for improvement and generalization across diverse desktop tasks, yet remains challenging due to environmental inefficiency and instability in extended training. To support scalable and robust training, we develop a distributed RL infrastructure capable of orchestrating thousands of parallel virtual desktop environments to accelerate large-scale online RL. Furthermore, we propose Entropulse, a training strategy that alternates reinforcement learning with supervised fine-tuning, effectively mitigating entropy collapse during extended training runs. We employ ComputerRL on open models GLM-4-9B-0414 and Qwen2.5-14B, and evaluate them on the OSWorld benchmark. The AutoGLM-OS-9B based on GLM-4-9B-0414 achieves a new state-of-the-art accuracy of 48.1%, demonstrating significant improvements for general agents in desktop automation. The algorithm and framework are adopted in building AutoGLM (Liu et al., 2024a)
CAMEL: Continuous Action Masking Enabled by Large Language Models for Reinforcement Learning
Feb 17, 2025

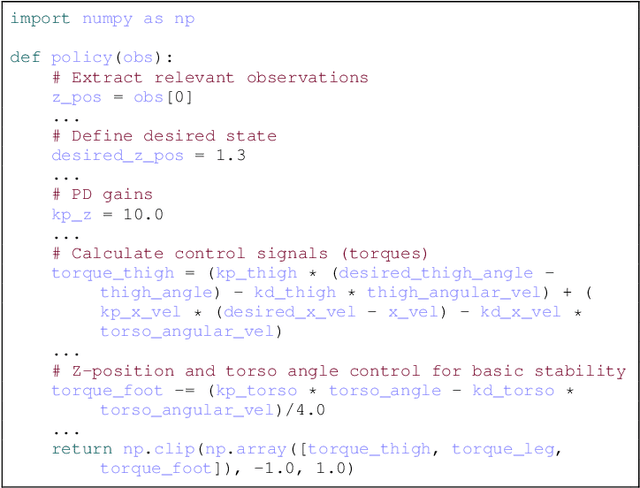

Reinforcement learning (RL) in continuous action spaces encounters persistent challenges, such as inefficient exploration and convergence to suboptimal solutions. To address these limitations, we propose CAMEL, a novel framework integrating LLM-generated suboptimal policies into the RL training pipeline. CAMEL leverages dynamic action masking and an adaptive epsilon-masking mechanism to guide exploration during early training stages while gradually enabling agents to optimize policies independently. At the core of CAMEL lies the integration of Python-executable suboptimal policies generated by LLMs based on environment descriptions and task objectives. Although simplistic and hard-coded, these policies offer valuable initial guidance for RL agents. To effectively utilize these priors, CAMEL employs masking-aware optimization to dynamically constrain the action space based on LLM outputs. Additionally, epsilon-masking gradually reduces reliance on LLM-generated guidance, enabling agents to transition from constrained exploration to autonomous policy refinement. Experimental validation on Gymnasium MuJoCo environments demonstrates the effectiveness of CAMEL. In Hopper-v4 and Ant-v4, LLM-generated policies significantly improve sample efficiency, achieving performance comparable to or surpassing expert masking baselines. For Walker2d-v4, where LLMs struggle to accurately model bipedal gait dynamics, CAMEL maintains robust RL performance without notable degradation, highlighting the framework's adaptability across diverse tasks. While CAMEL shows promise in enhancing sample efficiency and mitigating convergence challenges, these issues remain open for further research. Future work aims to generalize CAMEL to multimodal LLMs for broader observation-action spaces and automate policy evaluation, reducing human intervention and enhancing scalability in RL training pipelines.
Snapshot Reinforcement Learning: Leveraging Prior Trajectories for Efficiency
Mar 12, 2024



Deep reinforcement learning (DRL) algorithms require substantial samples and computational resources to achieve higher performance, which restricts their practical application and poses challenges for further development. Given the constraint of limited resources, it is essential to leverage existing computational work (e.g., learned policies, samples) to enhance sample efficiency and reduce the computational resource consumption of DRL algorithms. Previous works to leverage existing computational work require intrusive modifications to existing algorithms and models, designed specifically for specific algorithms, lacking flexibility and universality. In this paper, we present the Snapshot Reinforcement Learning (SnapshotRL) framework, which enhances sample efficiency by simply altering environments, without making any modifications to algorithms and models. By allowing student agents to choose states in teacher trajectories as the initial state to sample, SnapshotRL can effectively utilize teacher trajectories to assist student agents in training, allowing student agents to explore a larger state space at the early training phase. We propose a simple and effective SnapshotRL baseline algorithm, S3RL, which integrates well with existing DRL algorithms. Our experiments demonstrate that integrating S3RL with TD3, SAC, and PPO algorithms on the MuJoCo benchmark significantly improves sample efficiency and average return, without extra samples and additional computational resources.
Open RL Benchmark: Comprehensive Tracked Experiments for Reinforcement Learning
Feb 05, 2024



In many Reinforcement Learning (RL) papers, learning curves are useful indicators to measure the effectiveness of RL algorithms. However, the complete raw data of the learning curves are rarely available. As a result, it is usually necessary to reproduce the experiments from scratch, which can be time-consuming and error-prone. We present Open RL Benchmark, a set of fully tracked RL experiments, including not only the usual data such as episodic return, but also all algorithm-specific and system metrics. Open RL Benchmark is community-driven: anyone can download, use, and contribute to the data. At the time of writing, more than 25,000 runs have been tracked, for a cumulative duration of more than 8 years. Open RL Benchmark covers a wide range of RL libraries and reference implementations. Special care is taken to ensure that each experiment is precisely reproducible by providing not only the full parameters, but also the versions of the dependencies used to generate it. In addition, Open RL Benchmark comes with a command-line interface (CLI) for easy fetching and generating figures to present the results. In this document, we include two case studies to demonstrate the usefulness of Open RL Benchmark in practice. To the best of our knowledge, Open RL Benchmark is the first RL benchmark of its kind, and the authors hope that it will improve and facilitate the work of researchers in the field.