 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePart I: Tricks or Traps? A Deep Dive into RL for LLM Reasoning
Aug 11, 2025Reinforcement learning for LLM reasoning has rapidly emerged as a prominent research area, marked by a significant surge in related studies on both algorithmic innovations and practical applications. Despite this progress, several critical challenges remain, including the absence of standardized guidelines for employing RL techniques and a fragmented understanding of their underlying mechanisms. Additionally, inconsistent experimental settings, variations in training data, and differences in model initialization have led to conflicting conclusions, obscuring the key characteristics of these techniques and creating confusion among practitioners when selecting appropriate techniques. This paper systematically reviews widely adopted RL techniques through rigorous reproductions and isolated evaluations within a unified open-source framework. We analyze the internal mechanisms, applicable scenarios, and core principles of each technique through fine-grained experiments, including datasets of varying difficulty, model sizes, and architectures. Based on these insights, we present clear guidelines for selecting RL techniques tailored to specific setups, and provide a reliable roadmap for practitioners navigating the RL for the LLM domain. Finally, we reveal that a minimalist combination of two techniques can unlock the learning capability of critic-free policies using vanilla PPO loss. The results demonstrate that our simple combination consistently improves performance, surpassing strategies like GRPO and DAPO.
Generalizing Verifiable Instruction Following
Jul 03, 2025A crucial factor for successful human and AI interaction is the ability of language models or chatbots to follow human instructions precisely. A common feature of instructions are output constraints like ``only answer with yes or no" or ``mention the word `abrakadabra' at least 3 times" that the user adds to craft a more useful answer. Even today's strongest models struggle with fulfilling such constraints. We find that most models strongly overfit on a small set of verifiable constraints from the benchmarks that test these abilities, a skill called precise instruction following, and are not able to generalize well to unseen output constraints. We introduce a new benchmark, IFBench, to evaluate precise instruction following generalization on 58 new, diverse, and challenging verifiable out-of-domain constraints. In addition, we perform an extensive analysis of how and on what data models can be trained to improve precise instruction following generalization. Specifically, we carefully design constraint verification modules and show that reinforcement learning with verifiable rewards (RLVR) significantly improves instruction following. In addition to IFBench, we release 29 additional new hand-annotated training constraints and verification functions, RLVR training prompts, and code.
2 OLMo 2 Furious
Dec 31, 2024
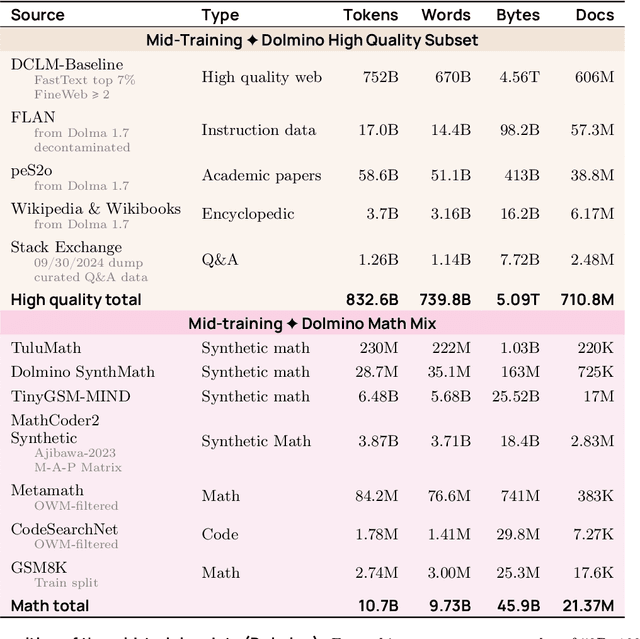
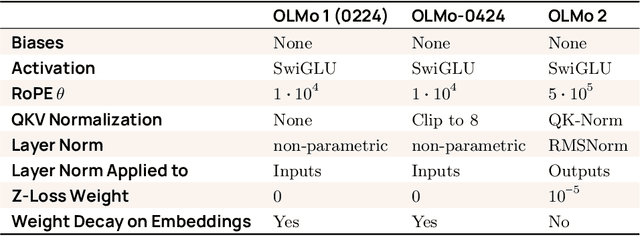

We present OLMo 2, the next generation of our fully open language models. OLMo 2 includes dense autoregressive models with improved architecture and training recipe, pretraining data mixtures, and instruction tuning recipes. Our modified model architecture and training recipe achieve both better training stability and improved per-token efficiency. Our updated pretraining data mixture introduces a new, specialized data mix called Dolmino Mix 1124, which significantly improves model capabilities across many downstream task benchmarks when introduced via late-stage curriculum training (i.e. specialized data during the annealing phase of pretraining). Finally, we incorporate best practices from T\"ulu 3 to develop OLMo 2-Instruct, focusing on permissive data and extending our final-stage reinforcement learning with verifiable rewards (RLVR). Our OLMo 2 base models sit at the Pareto frontier of performance to compute, often matching or outperforming open-weight only models like Llama 3.1 and Qwen 2.5 while using fewer FLOPs and with fully transparent training data, code, and recipe. Our fully open OLMo 2-Instruct models are competitive with or surpassing open-weight only models of comparable size, including Qwen 2.5, Llama 3.1 and Gemma 2. We release all OLMo 2 artifacts openly -- models at 7B and 13B scales, both pretrained and post-trained, including their full training data, training code and recipes, training logs and thousands of intermediate checkpoints. The final instruction model is available on the Ai2 Playground as a free research demo.
TÜLU 3: Pushing Frontiers in Open Language Model Post-Training
Nov 22, 2024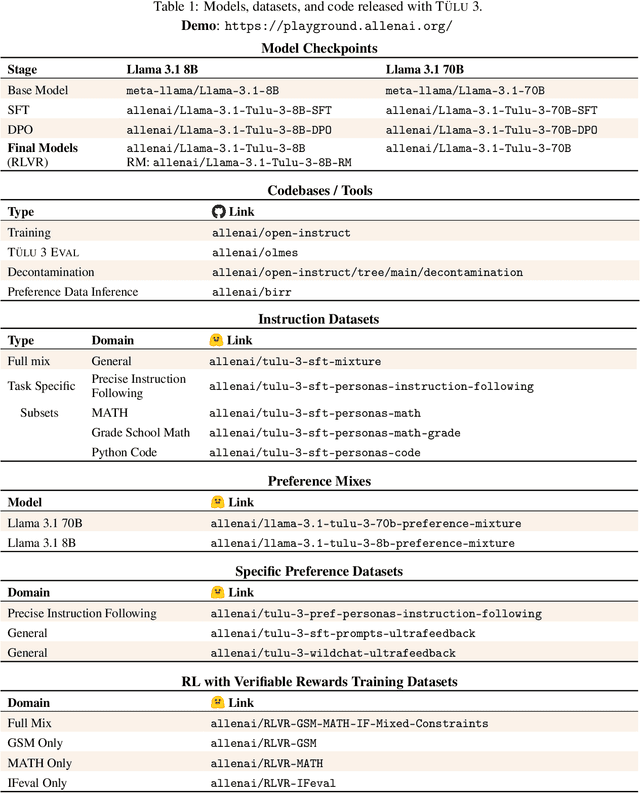



Language model post-training is applied to refine behaviors and unlock new skills across a wide range of recent language models, but open recipes for applying these techniques lag behind proprietary ones. The underlying training data and recipes for post-training are simultaneously the most important pieces of the puzzle and the portion with the least transparency. To bridge this gap, we introduce T\"ULU 3, a family of fully-open state-of-the-art post-trained models, alongside its data, code, and training recipes, serving as a comprehensive guide for modern post-training techniques. T\"ULU 3, which builds on Llama 3.1 base models, achieves results surpassing the instruct versions of Llama 3.1, Qwen 2.5, Mistral, and even closed models such as GPT-4o-mini and Claude 3.5-Haiku. The training algorithms for our models include supervised finetuning (SFT), Direct Preference Optimization (DPO), and a novel method we call Reinforcement Learning with Verifiable Rewards (RLVR). With T\"ULU 3, we introduce a multi-task evaluation scheme for post-training recipes with development and unseen evaluations, standard benchmark implementations, and substantial decontamination of existing open datasets on said benchmarks. We conclude with analysis and discussion of training methods that did not reliably improve performance. In addition to the T\"ULU 3 model weights and demo, we release the complete recipe -- including datasets for diverse core skills, a robust toolkit for data curation and evaluation, the training code and infrastructure, and, most importantly, a detailed report for reproducing and further adapting the T\"ULU 3 approach to more domains.
Asynchronous RLHF: Faster and More Efficient Off-Policy RL for Language Models
Oct 23, 2024



The dominant paradigm for RLHF is online and on-policy RL: synchronously generating from the large language model (LLM) policy, labelling with a reward model, and learning using feedback on the LLM's own outputs. While performant, this paradigm is computationally inefficient. Inspired by classical deep RL literature, we propose separating generation and learning in RLHF. This enables asynchronous generation of new samples while simultaneously training on old samples, leading to faster training and more compute-optimal scaling. However, asynchronous training relies on an underexplored regime, online but off-policy RLHF: learning on samples from previous iterations of our model. To understand the challenges in this regime, we investigate a fundamental question: how much off-policyness can we tolerate for asynchronous training to speed up learning but maintain performance? Among several RLHF algorithms we tested, we find that online DPO is most robust to off-policy data, and robustness increases with the scale of the policy model. We study further compute optimizations for asynchronous RLHF but find that they come at a performance cost, giving rise to a trade-off. Finally, we verify the scalability of asynchronous RLHF by training LLaMA 3.1 8B on an instruction-following task 40% faster than a synchronous run while matching final performance.
The N+ Implementation Details of RLHF with PPO: A Case Study on TL;DR Summarization
Mar 24, 2024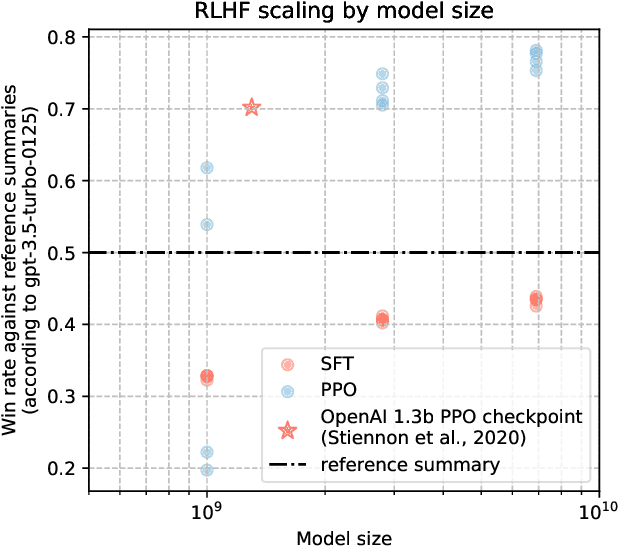
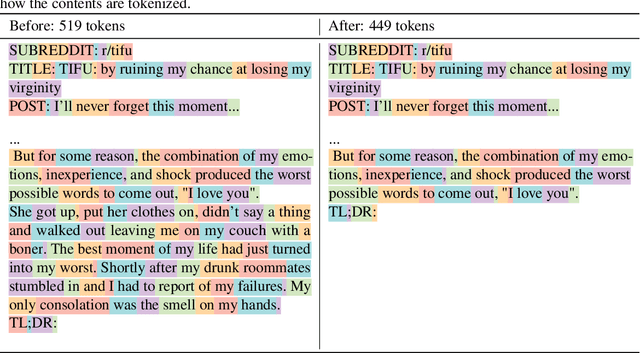
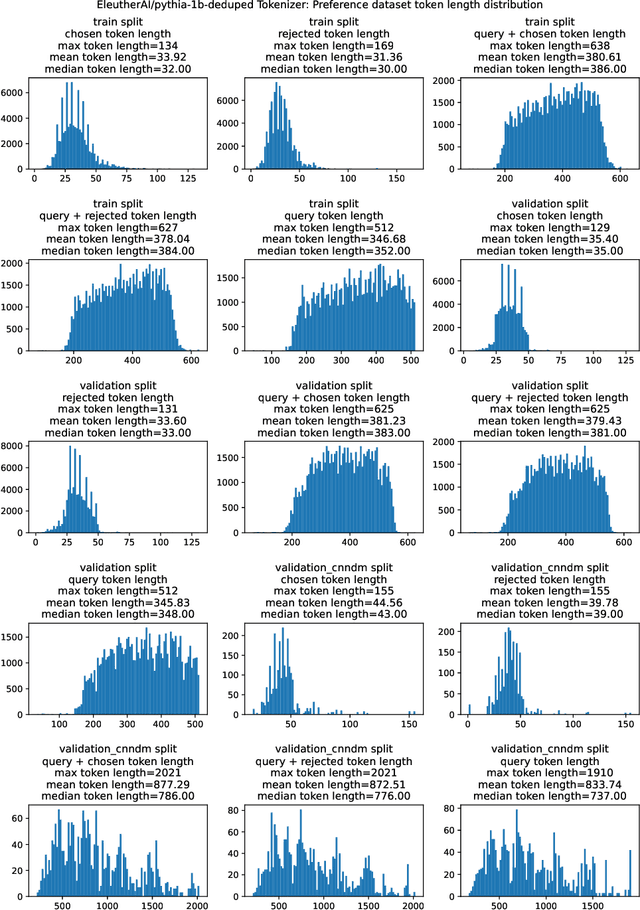
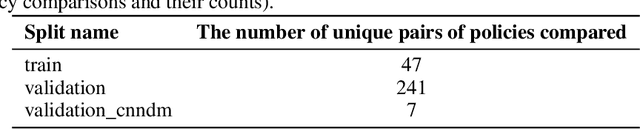
This work is the first to openly reproduce the Reinforcement Learning from Human Feedback (RLHF) scaling behaviors reported in OpenAI's seminal TL;DR summarization work. We create an RLHF pipeline from scratch, enumerate over 20 key implementation details, and share key insights during the reproduction. Our RLHF-trained Pythia models demonstrate significant gains in response quality that scale with model size, with our 2.8B, 6.9B models outperforming OpenAI's released 1.3B checkpoint. We publicly release the trained model checkpoints and code to facilitate further research and accelerate progress in the field (\url{https://github.com/vwxyzjn/summarize_from_feedback_details}).
Open RL Benchmark: Comprehensive Tracked Experiments for Reinforcement Learning
Feb 05, 2024



In many Reinforcement Learning (RL) papers, learning curves are useful indicators to measure the effectiveness of RL algorithms. However, the complete raw data of the learning curves are rarely available. As a result, it is usually necessary to reproduce the experiments from scratch, which can be time-consuming and error-prone. We present Open RL Benchmark, a set of fully tracked RL experiments, including not only the usual data such as episodic return, but also all algorithm-specific and system metrics. Open RL Benchmark is community-driven: anyone can download, use, and contribute to the data. At the time of writing, more than 25,000 runs have been tracked, for a cumulative duration of more than 8 years. Open RL Benchmark covers a wide range of RL libraries and reference implementations. Special care is taken to ensure that each experiment is precisely reproducible by providing not only the full parameters, but also the versions of the dependencies used to generate it. In addition, Open RL Benchmark comes with a command-line interface (CLI) for easy fetching and generating figures to present the results. In this document, we include two case studies to demonstrate the usefulness of Open RL Benchmark in practice. To the best of our knowledge, Open RL Benchmark is the first RL benchmark of its kind, and the authors hope that it will improve and facilitate the work of researchers in the field.
Reward Scale Robustness for Proximal Policy Optimization via DreamerV3 Tricks
Oct 26, 2023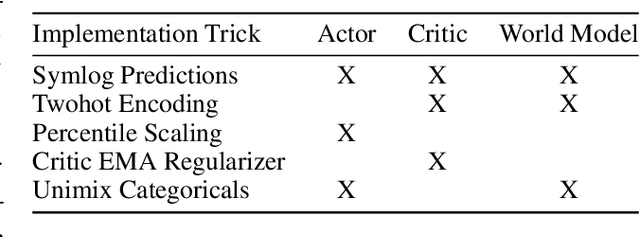
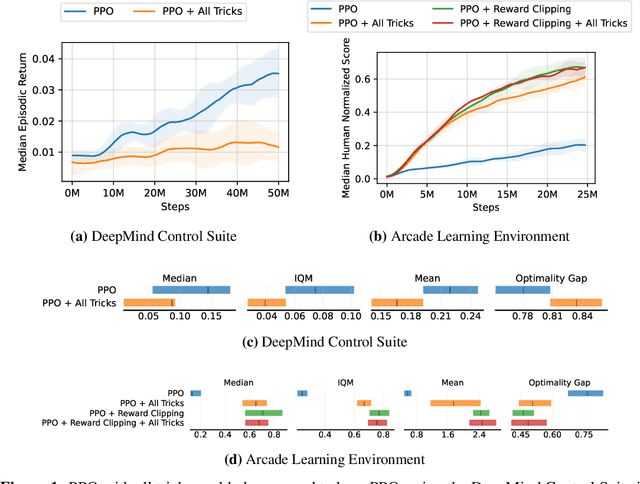
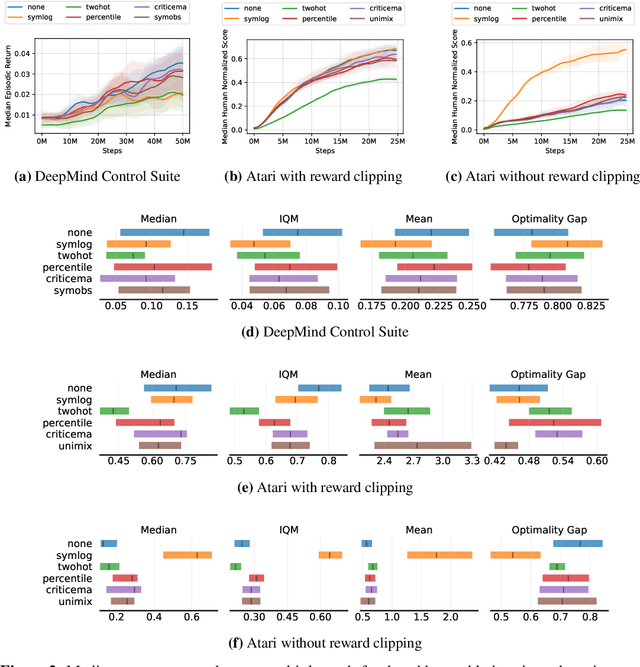
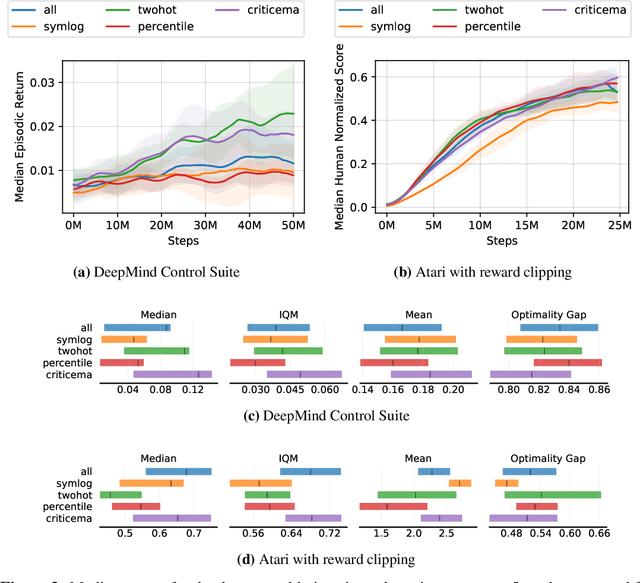
Most reinforcement learning methods rely heavily on dense, well-normalized environment rewards. DreamerV3 recently introduced a model-based method with a number of tricks that mitigate these limitations, achieving state-of-the-art on a wide range of benchmarks with a single set of hyperparameters. This result sparked discussion about the generality of the tricks, since they appear to be applicable to other reinforcement learning algorithms. Our work applies DreamerV3's tricks to PPO and is the first such empirical study outside of the original work. Surprisingly, we find that the tricks presented do not transfer as general improvements to PPO. We use a high quality PPO reference implementation and present extensive ablation studies totaling over 10,000 A100 hours on the Arcade Learning Environment and the DeepMind Control Suite. Though our experiments demonstrate that these tricks do not generally outperform PPO, we identify cases where they succeed and offer insight into the relationship between the implementation tricks. In particular, PPO with these tricks performs comparably to PPO on Atari games with reward clipping and significantly outperforms PPO without reward clipping.
Zephyr: Direct Distillation of LM Alignment
Oct 25, 2023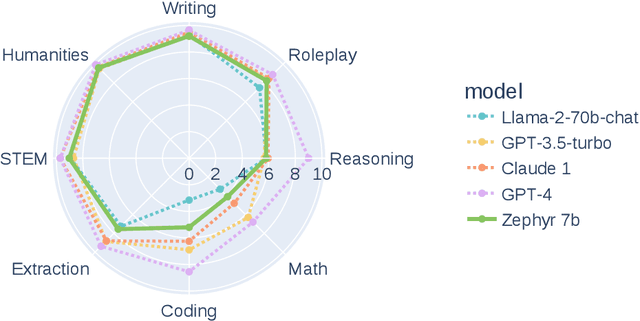
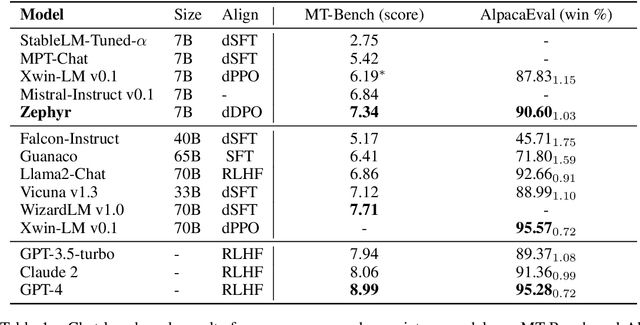
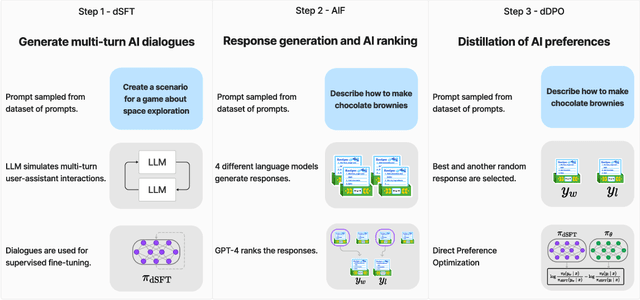
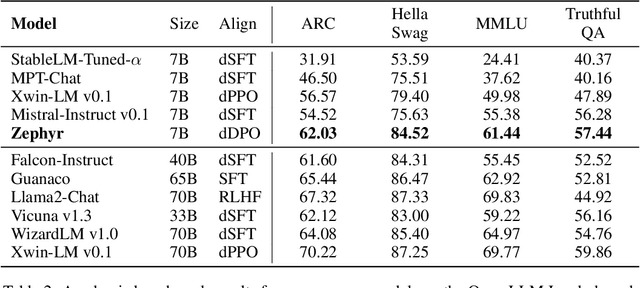
We aim to produce a smaller language model that is aligned to user intent. Previous research has shown that applying distilled supervised fine-tuning (dSFT) on larger models significantly improves task accuracy; however, these models are unaligned, i.e. they do not respond well to natural prompts. To distill this property, we experiment with the use of preference data from AI Feedback (AIF). Starting from a dataset of outputs ranked by a teacher model, we apply distilled direct preference optimization (dDPO) to learn a chat model with significantly improved intent alignment. The approach requires only a few hours of training without any additional sampling during fine-tuning. The final result, Zephyr-7B, sets the state-of-the-art on chat benchmarks for 7B parameter models, and requires no human annotation. In particular, results on MT-Bench show that Zephyr-7B surpasses Llama2-Chat-70B, the best open-access RLHF-based model. Code, models, data, and tutorials for the system are available at https://github.com/huggingface/alignment-handbook.
Cleanba: A Reproducible and Efficient Distributed Reinforcement Learning Platform
Sep 29, 2023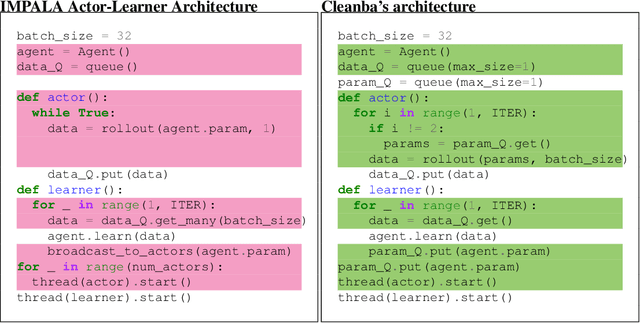
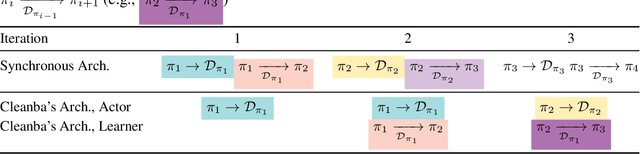
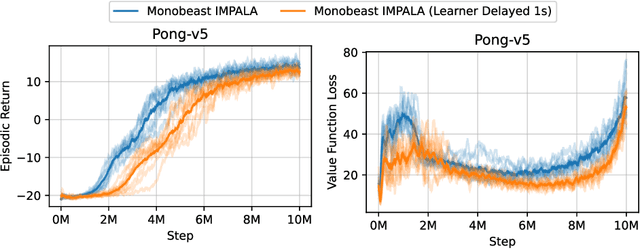
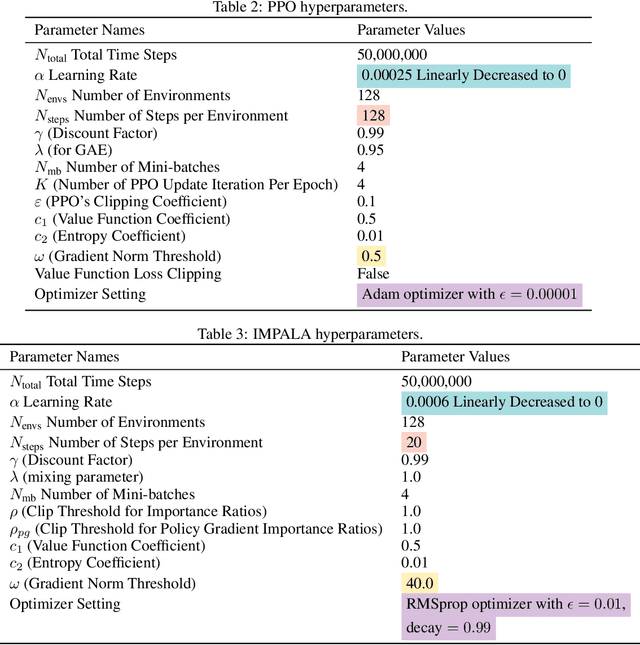
Distributed Deep Reinforcement Learning (DRL) aims to leverage more computational resources to train autonomous agents with less training time. Despite recent progress in the field, reproducibility issues have not been sufficiently explored. This paper first shows that the typical actor-learner framework can have reproducibility issues even if hyperparameters are controlled. We then introduce Cleanba, a new open-source platform for distributed DRL that proposes a highly reproducible architecture. Cleanba implements highly optimized distributed variants of PPO and IMPALA. Our Atari experiments show that these variants can obtain equivalent or higher scores than strong IMPALA baselines in moolib and torchbeast and PPO baseline in CleanRL. However, Cleanba variants present 1) shorter training time and 2) more reproducible learning curves in different hardware settings. Cleanba's source code is available at \url{https://github.com/vwxyzjn/cleanba}