 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Open RL Benchmark: Comprehensive Tracked Experiments for Reinforcement Learning
Feb 05, 2024



In many Reinforcement Learning (RL) papers, learning curves are useful indicators to measure the effectiveness of RL algorithms. However, the complete raw data of the learning curves are rarely available. As a result, it is usually necessary to reproduce the experiments from scratch, which can be time-consuming and error-prone. We present Open RL Benchmark, a set of fully tracked RL experiments, including not only the usual data such as episodic return, but also all algorithm-specific and system metrics. Open RL Benchmark is community-driven: anyone can download, use, and contribute to the data. At the time of writing, more than 25,000 runs have been tracked, for a cumulative duration of more than 8 years. Open RL Benchmark covers a wide range of RL libraries and reference implementations. Special care is taken to ensure that each experiment is precisely reproducible by providing not only the full parameters, but also the versions of the dependencies used to generate it. In addition, Open RL Benchmark comes with a command-line interface (CLI) for easy fetching and generating figures to present the results. In this document, we include two case studies to demonstrate the usefulness of Open RL Benchmark in practice. To the best of our knowledge, Open RL Benchmark is the first RL benchmark of its kind, and the authors hope that it will improve and facilitate the work of researchers in the field.
Cleanba: A Reproducible and Efficient Distributed Reinforcement Learning Platform
Sep 29, 2023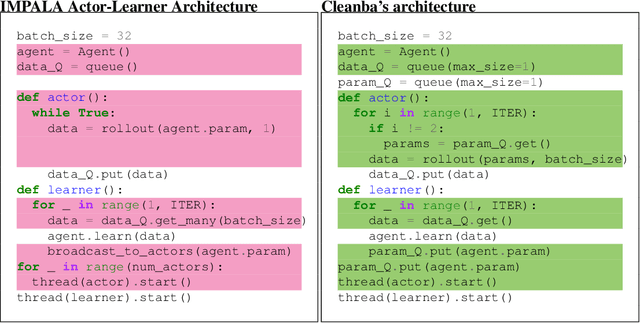
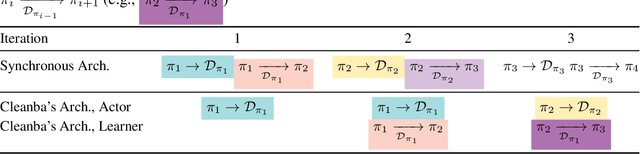
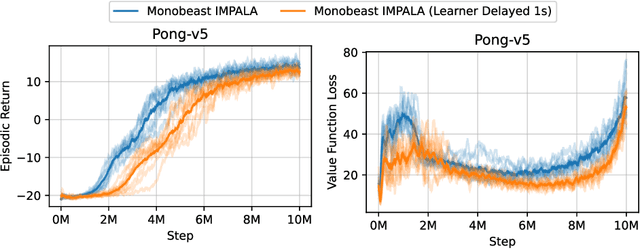
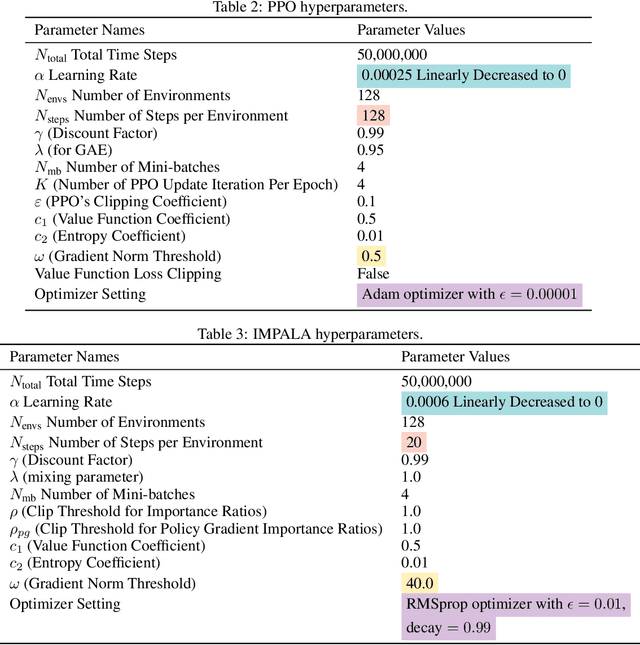
Distributed Deep Reinforcement Learning (DRL) aims to leverage more computational resources to train autonomous agents with less training time. Despite recent progress in the field, reproducibility issues have not been sufficiently explored. This paper first shows that the typical actor-learner framework can have reproducibility issues even if hyperparameters are controlled. We then introduce Cleanba, a new open-source platform for distributed DRL that proposes a highly reproducible architecture. Cleanba implements highly optimized distributed variants of PPO and IMPALA. Our Atari experiments show that these variants can obtain equivalent or higher scores than strong IMPALA baselines in moolib and torchbeast and PPO baseline in CleanRL. However, Cleanba variants present 1) shorter training time and 2) more reproducible learning curves in different hardware settings. Cleanba's source code is available at \url{https://github.com/vwxyzjn/cleanba}
EnvPool: A Highly Parallel Reinforcement Learning Environment Execution Engine
Jun 21, 2022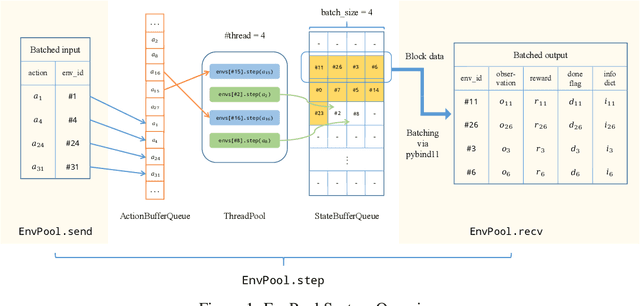
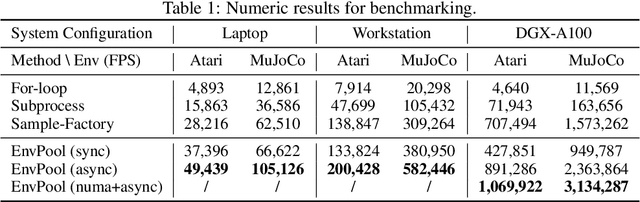
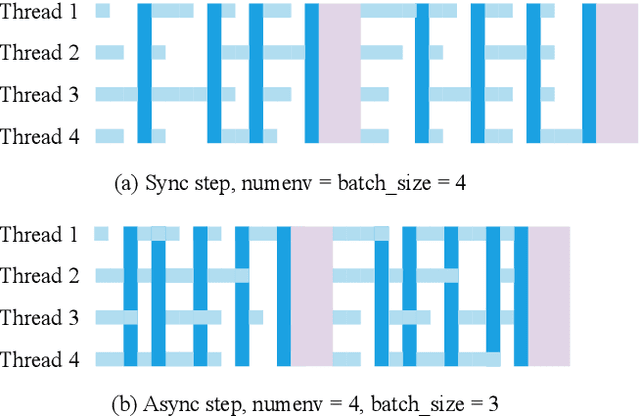
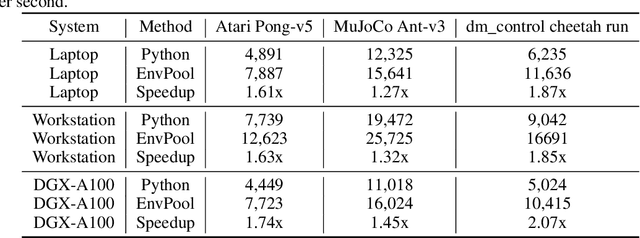
There has been significant progress in developing reinforcement learning (RL) training systems. Past works such as IMPALA, Apex, Seed RL, Sample Factory, and others aim to improve the system's overall throughput. In this paper, we try to address a common bottleneck in the RL training system, i.e., parallel environment execution, which is often the slowest part of the whole system but receives little attention. With a curated design for paralleling RL environments, we have improved the RL environment simulation speed across different hardware setups, ranging from a laptop, and a modest workstation, to a high-end machine like NVIDIA DGX-A100. On a high-end machine, EnvPool achieves 1 million frames per second for the environment execution on Atari environments and 3 million frames per second on MuJoCo environments. When running on a laptop, the speed of EnvPool is 2.8 times of the Python subprocess. Moreover, great compatibility with existing RL training libraries has been demonstrated in the open-sourced community, including CleanRL, rl_games, DeepMind Acme, etc. Finally, EnvPool allows researchers to iterate their ideas at a much faster pace and has the great potential to become the de facto RL environment execution engine. Example runs show that it takes only 5 minutes to train Atari Pong and MuJoCo Ant, both on a laptop. EnvPool has already been open-sourced at https://github.com/sail-sg/envpool.
Tianshou: a Highly Modularized Deep Reinforcement Learning Library
Jul 29, 2021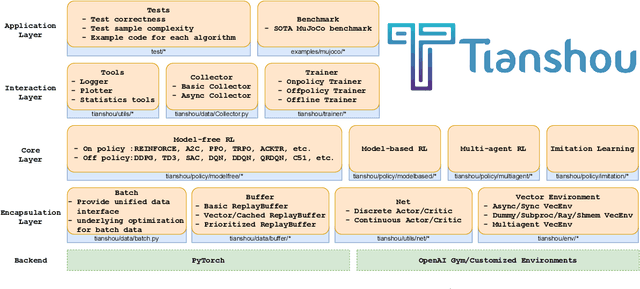

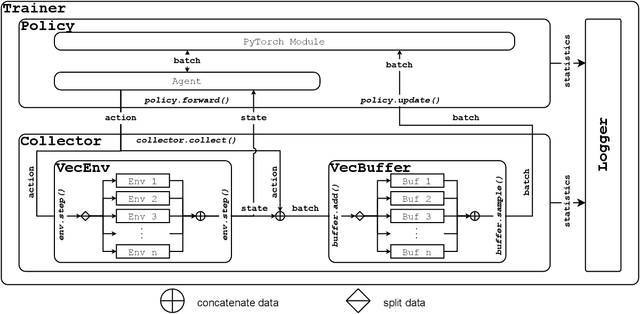
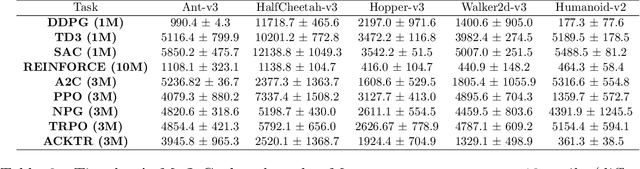
We present Tianshou, a highly modularized python library for deep reinforcement learning (DRL) that uses PyTorch as its backend. Tianshou aims to provide building blocks to replicate common RL experiments and has officially supported more than 15 classic algorithms succinctly. To facilitate related research and prove Tianshou's reliability, we release Tianshou's benchmark of MuJoCo environments, covering 9 classic algorithms and 9/13 Mujoco tasks with state-of-the-art performance. We open-sourced Tianshou at https://github.com/thu-ml/tianshou/, which has received over 3k stars and become one of the most popular PyTorch-based DRL libraries.