 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Mindstorms in Natural Language-Based Societies of Mind
May 26, 2023



Both Minsky's "society of mind" and Schmidhuber's "learning to think" inspire diverse societies of large multimodal neural networks (NNs) that solve problems by interviewing each other in a "mindstorm." Recent implementations of NN-based societies of minds consist of large language models (LLMs) and other NN-based experts communicating through a natural language interface. In doing so, they overcome the limitations of single LLMs, improving multimodal zero-shot reasoning. In these natural language-based societies of mind (NLSOMs), new agents -- all communicating through the same universal symbolic language -- are easily added in a modular fashion. To demonstrate the power of NLSOMs, we assemble and experiment with several of them (having up to 129 members), leveraging mindstorms in them to solve some practical AI tasks: visual question answering, image captioning, text-to-image synthesis, 3D generation, egocentric retrieval, embodied AI, and general language-based task solving. We view this as a starting point towards much larger NLSOMs with billions of agents-some of which may be humans. And with this emergence of great societies of heterogeneous minds, many new research questions have suddenly become paramount to the future of artificial intelligence. What should be the social structure of an NLSOM? What would be the (dis)advantages of having a monarchical rather than a democratic structure? How can principles of NN economies be used to maximize the total reward of a reinforcement learning NLSOM? In this work, we identify, discuss, and try to answer some of these questions.
Exploring through Random Curiosity with General Value Functions
Nov 18, 2022Efficient exploration in reinforcement learning is a challenging problem commonly addressed through intrinsic rewards. Recent prominent approaches are based on state novelty or variants of artificial curiosity. However, directly applying them to partially observable environments can be ineffective and lead to premature dissipation of intrinsic rewards. Here we propose random curiosity with general value functions (RC-GVF), a novel intrinsic reward function that draws upon connections between these distinct approaches. Instead of using only the current observation's novelty or a curiosity bonus for failing to predict precise environment dynamics, RC-GVF derives intrinsic rewards through predicting temporally extended general value functions. We demonstrate that this improves exploration in a hard-exploration diabolical lock problem. Furthermore, RC-GVF significantly outperforms previous methods in the absence of ground-truth episodic counts in the partially observable MiniGrid environments. Panoramic observations on MiniGrid further boost RC-GVF's performance such that it is competitive to baselines exploiting privileged information in form of episodic counts.
The Benefits of Model-Based Generalization in Reinforcement Learning
Nov 04, 2022


Model-Based Reinforcement Learning (RL) is widely believed to have the potential to improve sample efficiency by allowing an agent to synthesize large amounts of imagined experience. Experience Replay (ER) can be considered a simple kind of model, which has proved extremely effective at improving the stability and efficiency of deep RL. In principle, a learned parametric model could improve on ER by generalizing from real experience to augment the dataset with additional plausible experience. However, owing to the many design choices involved in empirically successful algorithms, it can be very hard to establish where the benefits are actually coming from. Here, we provide theoretical and empirical insight into when, and how, we can expect data generated by a learned model to be useful. First, we provide a general theorem motivating how learning a model as an intermediate step can narrow down the set of possible value functions more than learning a value function directly from data using the Bellman equation. Second, we provide an illustrative example showing empirically how a similar effect occurs in a more concrete setting with neural network function approximation. Finally, we provide extensive experiments showing the benefit of model-based learning for online RL in environments with combinatorial complexity, but factored structure that allows a learned model to generalize. In these experiments, we take care to control for other factors in order to isolate, insofar as possible, the benefit of using experience generated by a learned model relative to ER alone.
Goal-Conditioned Generators of Deep Policies
Jul 04, 2022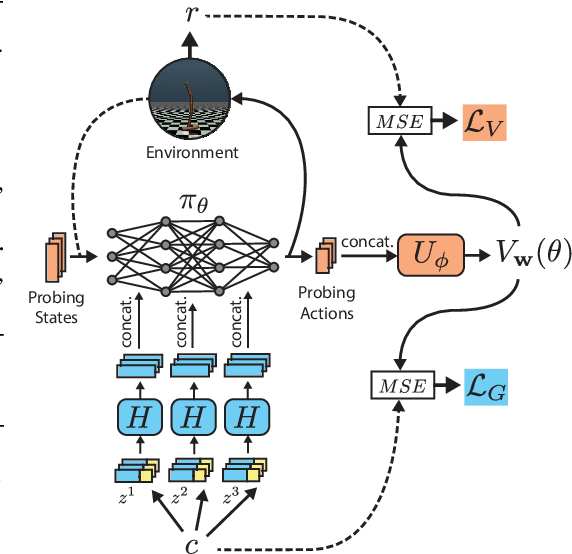

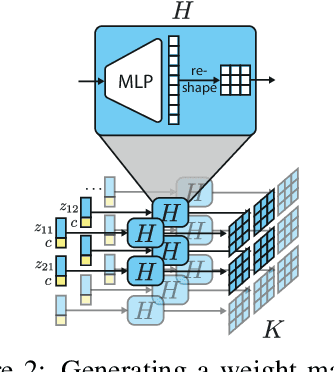
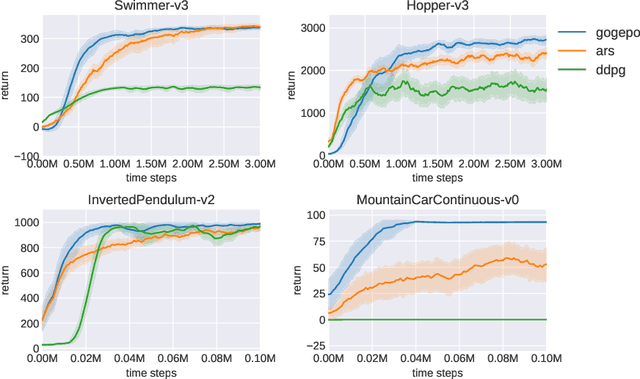
Goal-conditioned Reinforcement Learning (RL) aims at learning optimal policies, given goals encoded in special command inputs. Here we study goal-conditioned neural nets (NNs) that learn to generate deep NN policies in form of context-specific weight matrices, similar to Fast Weight Programmers and other methods from the 1990s. Using context commands of the form "generate a policy that achieves a desired expected return," our NN generators combine powerful exploration of parameter space with generalization across commands to iteratively find better and better policies. A form of weight-sharing HyperNetworks and policy embeddings scales our method to generate deep NNs. Experiments show how a single learned policy generator can produce policies that achieve any return seen during training. Finally, we evaluate our algorithm on a set of continuous control tasks where it exhibits competitive performance. Our code is public.
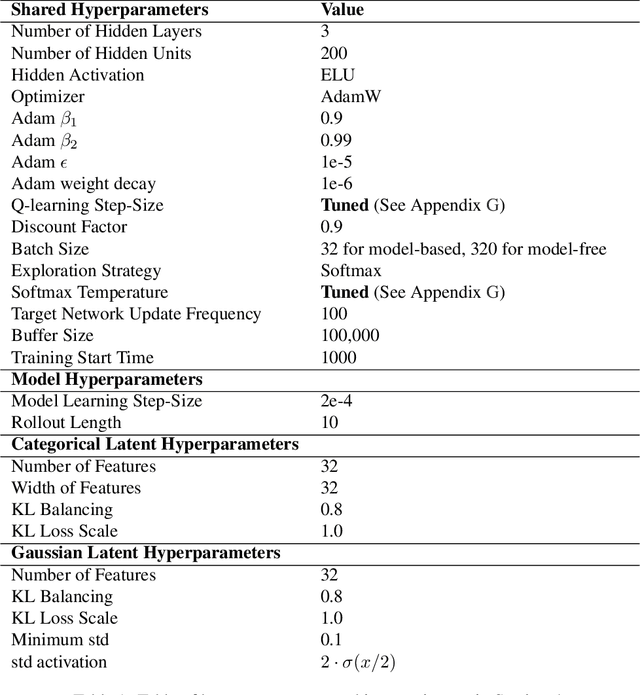
General Policy Evaluation and Improvement by Learning to Identify Few But Crucial States
Jul 04, 2022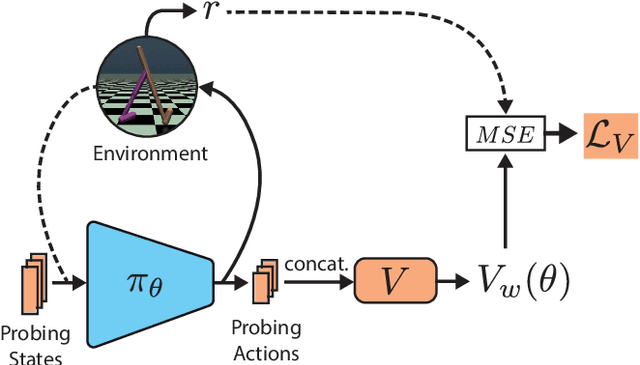
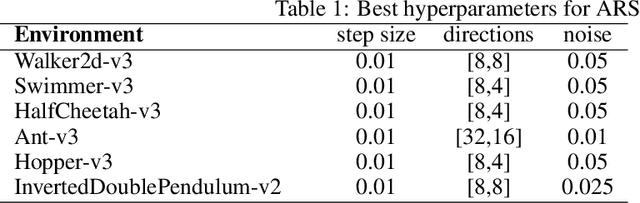
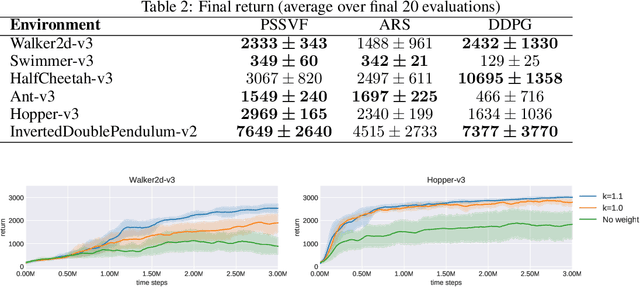
Learning to evaluate and improve policies is a core problem of Reinforcement Learning (RL). Traditional RL algorithms learn a value function defined for a single policy. A recently explored competitive alternative is to learn a single value function for many policies. Here we combine the actor-critic architecture of Parameter-Based Value Functions and the policy embedding of Policy Evaluation Networks to learn a single value function for evaluating (and thus helping to improve) any policy represented by a deep neural network (NN). The method yields competitive experimental results. In continuous control problems with infinitely many states, our value function minimizes its prediction error by simultaneously learning a small set of `probing states' and a mapping from actions produced in probing states to the policy's return. The method extracts crucial abstract knowledge about the environment in form of very few states sufficient to fully specify the behavior of many policies. A policy improves solely by changing actions in probing states, following the gradient of the value function's predictions. Surprisingly, it is possible to clone the behavior of a near-optimal policy in Swimmer-v3 and Hopper-v3 environments only by knowing how to act in 3 and 5 such learned states, respectively. Remarkably, our value function trained to evaluate NN policies is also invariant to changes of the policy architecture: we show that it allows for zero-shot learning of linear policies competitive with the best policy seen during training. Our code is public.
Hierarchical Text-Conditional Image Generation with CLIP Latents
Apr 13, 2022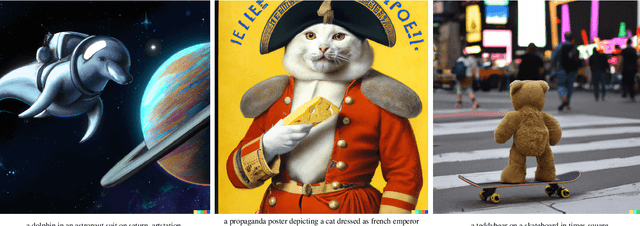

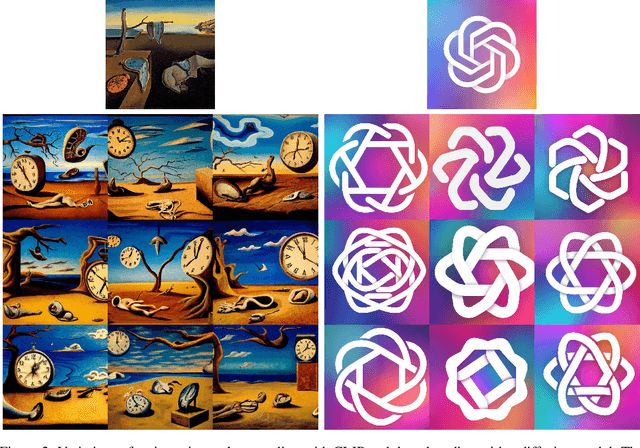
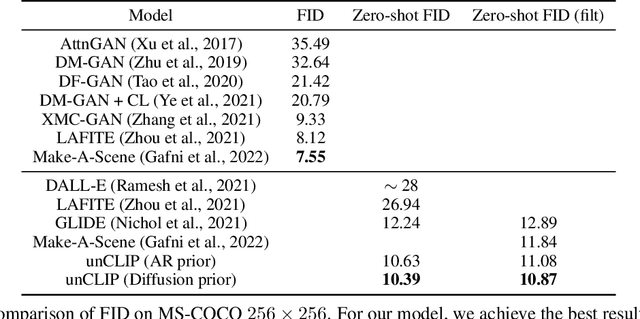
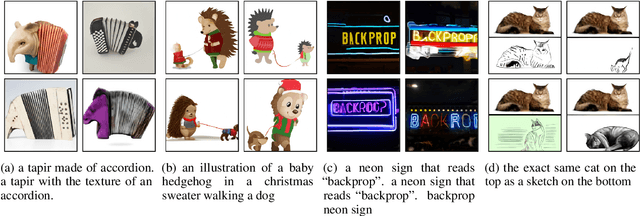
Contrastive models like CLIP have been shown to learn robust representations of images that capture both semantics and style. To leverage these representations for image generation, we propose a two-stage model: a prior that generates a CLIP image embedding given a text caption, and a decoder that generates an image conditioned on the image embedding. We show that explicitly generating image representations improves image diversity with minimal loss in photorealism and caption similarity. Our decoders conditioned on image representations can also produce variations of an image that preserve both its semantics and style, while varying the non-essential details absent from the image representation. Moreover, the joint embedding space of CLIP enables language-guided image manipulations in a zero-shot fashion. We use diffusion models for the decoder and experiment with both autoregressive and diffusion models for the prior, finding that the latter are computationally more efficient and produce higher-quality samples.
GLIDE: Towards Photorealistic Image Generation and Editing with Text-Guided Diffusion Models
Dec 22, 2021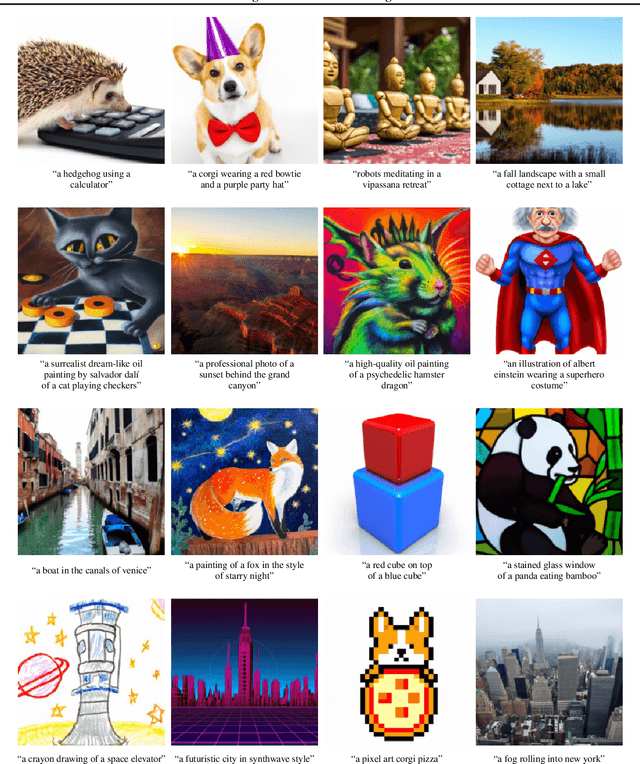
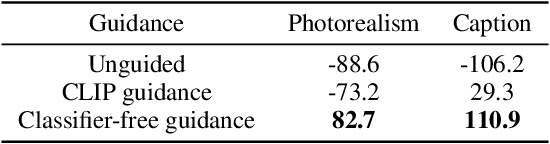
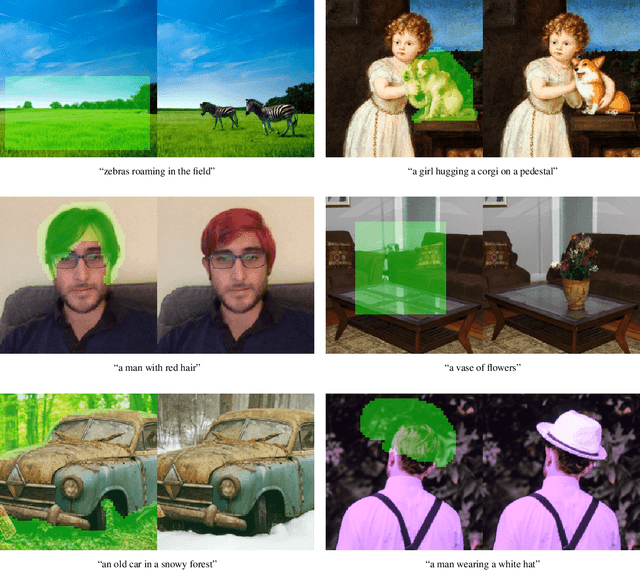
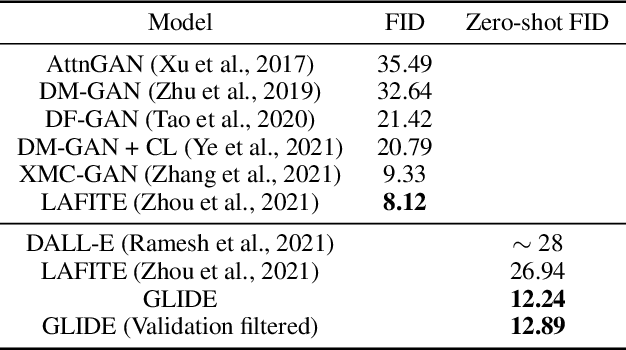
Diffusion models have recently been shown to generate high-quality synthetic images, especially when paired with a guidance technique to trade off diversity for fidelity. We explore diffusion models for the problem of text-conditional image synthesis and compare two different guidance strategies: CLIP guidance and classifier-free guidance. We find that the latter is preferred by human evaluators for both photorealism and caption similarity, and often produces photorealistic samples. Samples from a 3.5 billion parameter text-conditional diffusion model using classifier-free guidance are favored by human evaluators to those from DALL-E, even when the latter uses expensive CLIP reranking. Additionally, we find that our models can be fine-tuned to perform image inpainting, enabling powerful text-driven image editing. We train a smaller model on a filtered dataset and release the code and weights at https://github.com/openai/glide-text2im.
Unsupervised Neural Machine Translation with Generative Language Models Only
Oct 11, 2021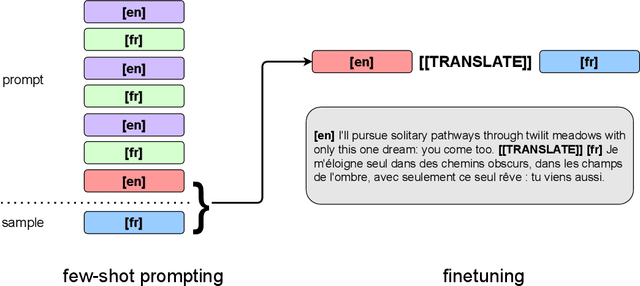
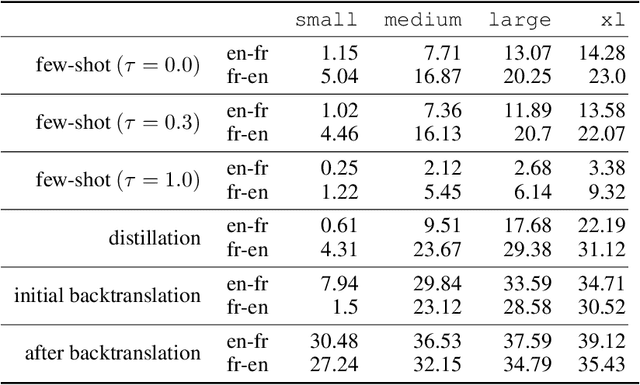
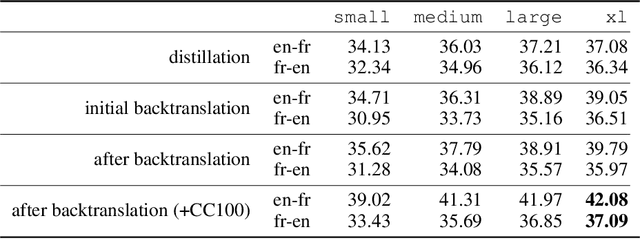

We show how to derive state-of-the-art unsupervised neural machine translation systems from generatively pre-trained language models. Our method consists of three steps: few-shot amplification, distillation, and backtranslation. We first use the zero-shot translation ability of large pre-trained language models to generate translations for a small set of unlabeled sentences. We then amplify these zero-shot translations by using them as few-shot demonstrations for sampling a larger synthetic dataset. This dataset is distilled by discarding the few-shot demonstrations and then fine-tuning. During backtranslation, we repeatedly generate translations for a set of inputs and then fine-tune a single language model on both directions of the translation task at once, ensuring cycle-consistency by swapping the roles of gold monotext and generated translations when fine-tuning. By using our method to leverage GPT-3's zero-shot translation capability, we achieve a new state-of-the-art in unsupervised translation on the WMT14 English-French benchmark, attaining a BLEU score of 42.1.
Zero-Shot Text-to-Image Generation
Feb 26, 2021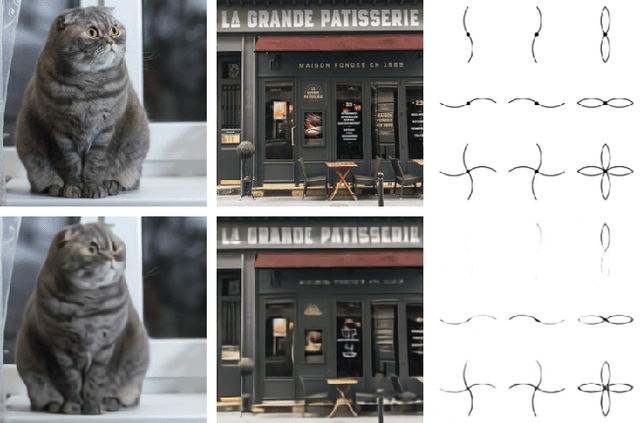

Text-to-image generation has traditionally focused on finding better modeling assumptions for training on a fixed dataset. These assumptions might involve complex architectures, auxiliary losses, or side information such as object part labels or segmentation masks supplied during training. We describe a simple approach for this task based on a transformer that autoregressively models the text and image tokens as a single stream of data. With sufficient data and scale, our approach is competitive with previous domain-specific models when evaluated in a zero-shot fashion.