 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmnixR: Evaluating Omni-modality Language Models on Reasoning across Modalities
Oct 16, 2024We introduce OmnixR, an evaluation suite designed to benchmark SoTA Omni-modality Language Models, such as GPT-4o and Gemini. Evaluating OLMs, which integrate multiple modalities such as text, vision, and audio, presents unique challenges. Particularly, the user message might often consist of multiple modalities, such that OLMs have to establish holistic understanding and reasoning across modalities to accomplish the task. Existing benchmarks are limited to single modality or dual-modality tasks, overlooking comprehensive multi-modal assessments of model reasoning. To address this, OmnixR offers two evaluation variants: (1)synthetic subset: a synthetic dataset generated automatically by translating text into multiple modalities--audio, images, video, and hybrids (Omnify). (2)realistic subset: a real-world dataset, manually curated and annotated by experts, for evaluating cross-modal reasoning in natural settings. OmnixR presents a unique evaluation towards assessing OLMs over a diverse mix of modalities, such as a question that involves video, audio, and text, providing a rigorous cross-modal reasoning testbed unlike any existing benchmarks. Our experiments find that all state-of-the-art OLMs struggle with OmnixR questions that require integrating information from multiple modalities to answer. Further analysis highlights differences in reasoning behavior, underscoring the challenges of omni-modal AI alignment.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Text and Code Embeddings by Contrastive Pre-Training
Jan 24, 2022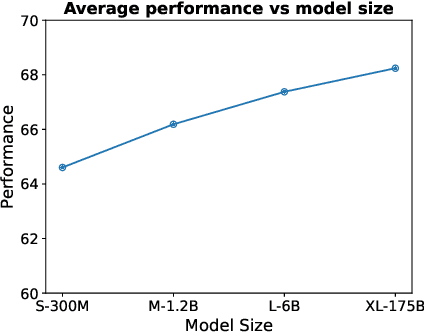
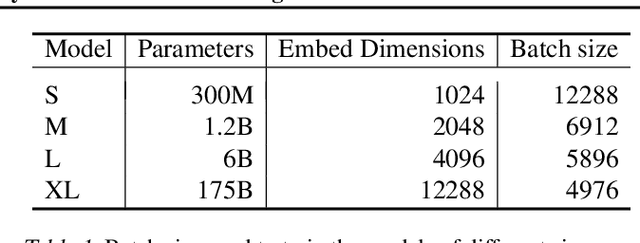
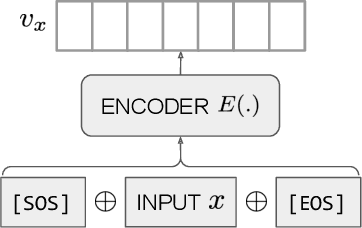
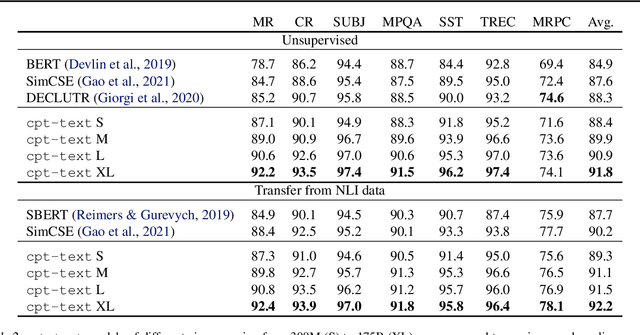
Text embeddings are useful features in many applications such as semantic search and computing text similarity. Previous work typically trains models customized for different use cases, varying in dataset choice, training objective and model architecture. In this work, we show that contrastive pre-training on unsupervised data at scale leads to high quality vector representations of text and code. The same unsupervised text embeddings that achieve new state-of-the-art results in linear-probe classification also display impressive semantic search capabilities and sometimes even perform competitively with fine-tuned models. On linear-probe classification accuracy averaging over 7 tasks, our best unsupervised model achieves a relative improvement of 4% and 1.8% over previous best unsupervised and supervised text embedding models respectively. The same text embeddings when evaluated on large-scale semantic search attains a relative improvement of 23.4%, 14.7%, and 10.6% over previous best unsupervised methods on MSMARCO, Natural Questions and TriviaQA benchmarks, respectively. Similarly to text embeddings, we train code embedding models on (text, code) pairs, obtaining a 20.8% relative improvement over prior best work on code search.
GLIDE: Towards Photorealistic Image Generation and Editing with Text-Guided Diffusion Models
Dec 22, 2021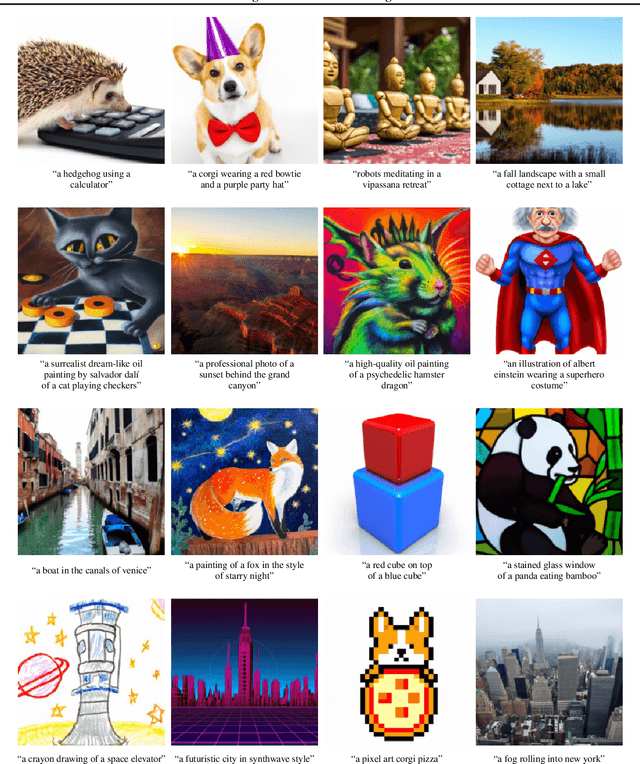
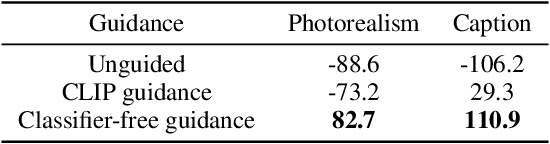
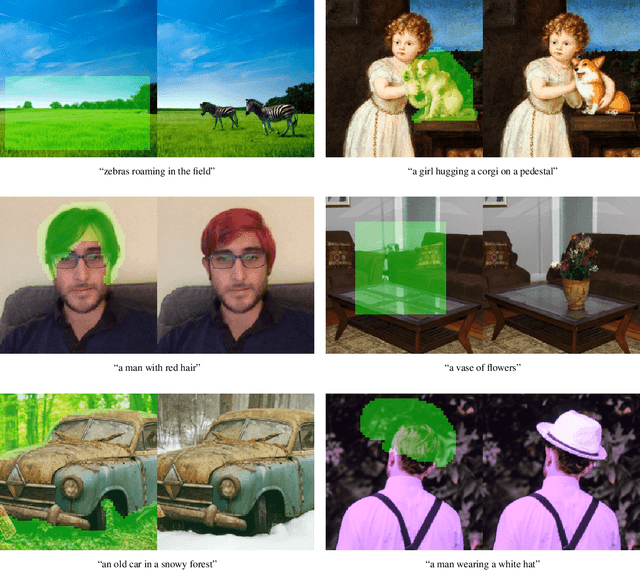
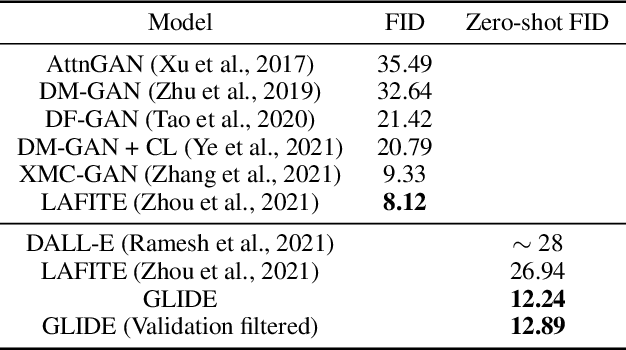
Diffusion models have recently been shown to generate high-quality synthetic images, especially when paired with a guidance technique to trade off diversity for fidelity. We explore diffusion models for the problem of text-conditional image synthesis and compare two different guidance strategies: CLIP guidance and classifier-free guidance. We find that the latter is preferred by human evaluators for both photorealism and caption similarity, and often produces photorealistic samples. Samples from a 3.5 billion parameter text-conditional diffusion model using classifier-free guidance are favored by human evaluators to those from DALL-E, even when the latter uses expensive CLIP reranking. Additionally, we find that our models can be fine-tuned to perform image inpainting, enabling powerful text-driven image editing. We train a smaller model on a filtered dataset and release the code and weights at https://github.com/openai/glide-text2im.
Unsupervised Neural Machine Translation with Generative Language Models Only
Oct 11, 2021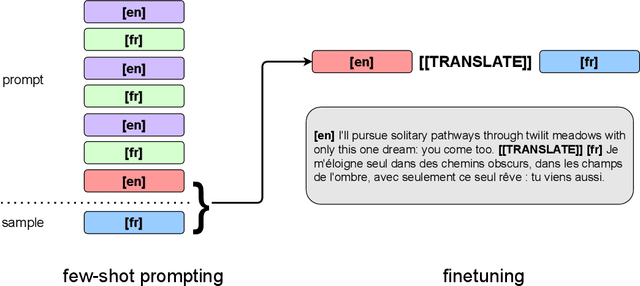
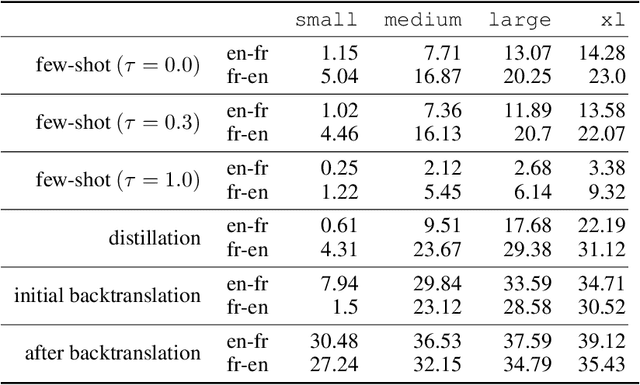
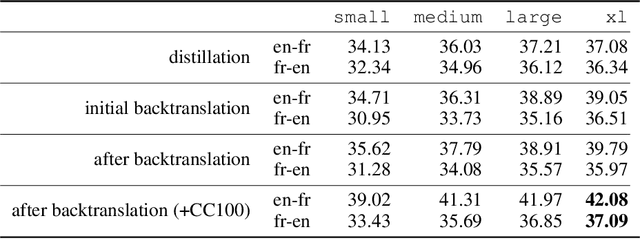

We show how to derive state-of-the-art unsupervised neural machine translation systems from generatively pre-trained language models. Our method consists of three steps: few-shot amplification, distillation, and backtranslation. We first use the zero-shot translation ability of large pre-trained language models to generate translations for a small set of unlabeled sentences. We then amplify these zero-shot translations by using them as few-shot demonstrations for sampling a larger synthetic dataset. This dataset is distilled by discarding the few-shot demonstrations and then fine-tuning. During backtranslation, we repeatedly generate translations for a set of inputs and then fine-tune a single language model on both directions of the translation task at once, ensuring cycle-consistency by swapping the roles of gold monotext and generated translations when fine-tuning. By using our method to leverage GPT-3's zero-shot translation capability, we achieve a new state-of-the-art in unsupervised translation on the WMT14 English-French benchmark, attaining a BLEU score of 42.1.
Language Models are Few-Shot Learners
Jun 05, 2020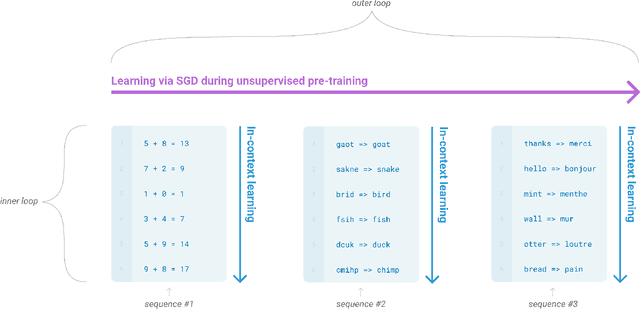
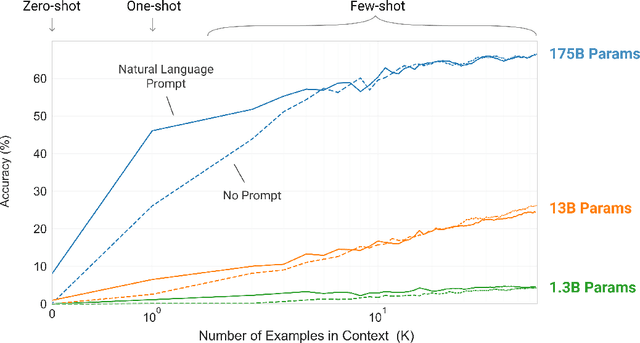
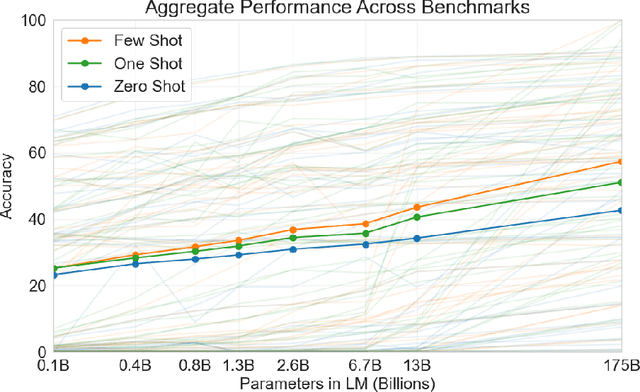
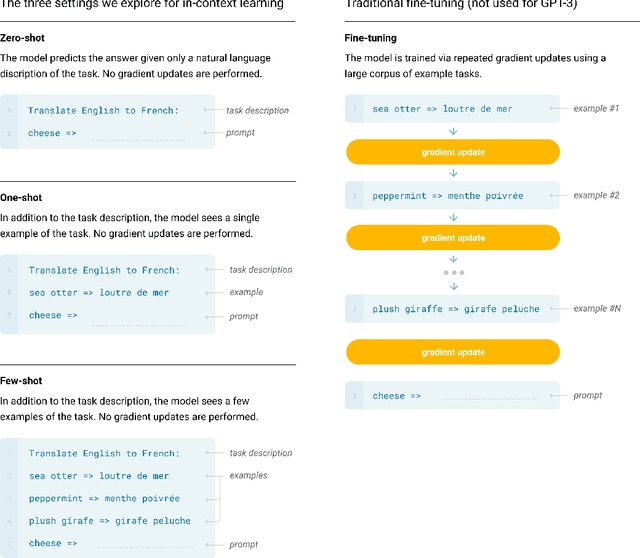
Recent work has demonstrated substantial gains on many NLP tasks and benchmarks by pre-training on a large corpus of text followed by fine-tuning on a specific task. While typically task-agnostic in architecture, this method still requires task-specific fine-tuning datasets of thousands or tens of thousands of examples. By contrast, humans can generally perform a new language task from only a few examples or from simple instructions - something which current NLP systems still largely struggle to do. Here we show that scaling up language models greatly improves task-agnostic, few-shot performance, sometimes even reaching competitiveness with prior state-of-the-art fine-tuning approaches. Specifically, we train GPT-3, an autoregressive language model with 175 billion parameters, 10x more than any previous non-sparse language model, and test its performance in the few-shot setting. For all tasks, GPT-3 is applied without any gradient updates or fine-tuning, with tasks and few-shot demonstrations specified purely via text interaction with the model. GPT-3 achieves strong performance on many NLP datasets, including translation, question-answering, and cloze tasks, as well as several tasks that require on-the-fly reasoning or domain adaptation, such as unscrambling words, using a novel word in a sentence, or performing 3-digit arithmetic. At the same time, we also identify some datasets where GPT-3's few-shot learning still struggles, as well as some datasets where GPT-3 faces methodological issues related to training on large web corpora. Finally, we find that GPT-3 can generate samples of news articles which human evaluators have difficulty distinguishing from articles written by humans. We discuss broader societal impacts of this finding and of GPT-3 in general.
Training Agents using Upside-Down Reinforcement Learning
Dec 05, 2019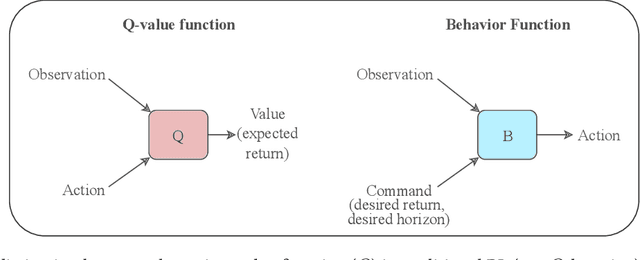
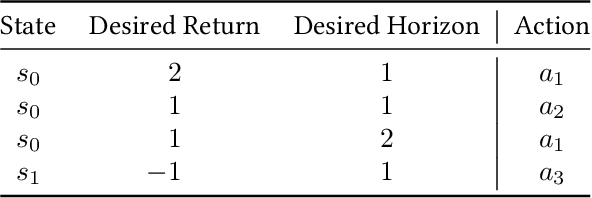
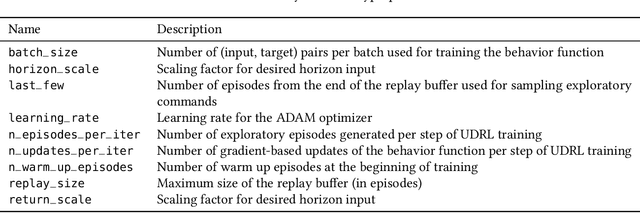
Traditional Reinforcement Learning (RL) algorithms either predict rewards with value functions or maximize them using policy search. We study an alternative: Upside-Down Reinforcement Learning (Upside-Down RL or UDRL), that solves RL problems primarily using supervised learning techniques. Many of its main principles are outlined in a companion report [34]. Here we present the first concrete implementation of UDRL and demonstrate its feasibility on certain episodic learning problems. Experimental results show that its performance can be surprisingly competitive with, and even exceed that of traditional baseline algorithms developed over decades of research.
Artificial Intelligence for Prosthetics - challenge solutions
Feb 07, 2019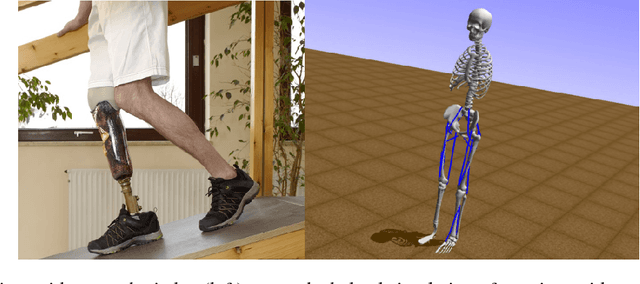
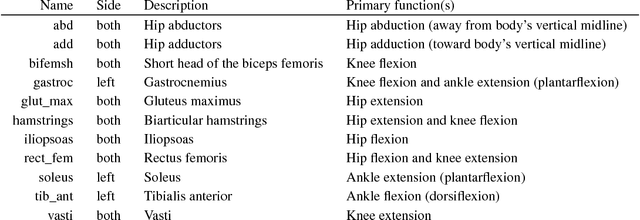
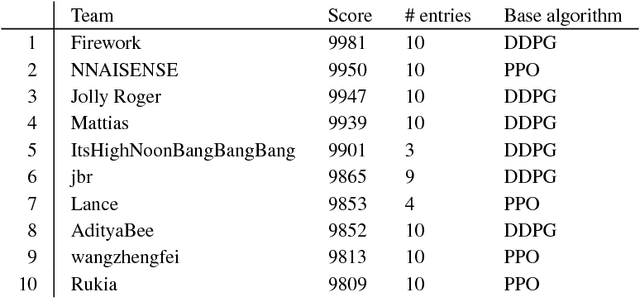

In the NeurIPS 2018 Artificial Intelligence for Prosthetics challenge, participants were tasked with building a controller for a musculoskeletal model with a goal of matching a given time-varying velocity vector. Top participants were invited to describe their algorithms. In this work, we describe the challenge and present thirteen solutions that used deep reinforcement learning approaches. Many solutions use similar relaxations and heuristics, such as reward shaping, frame skipping, discretization of the action space, symmetry, and policy blending. However, each team implemented different modifications of the known algorithms by, for example, dividing the task into subtasks, learning low-level control, or by incorporating expert knowledge and using imitation learning.
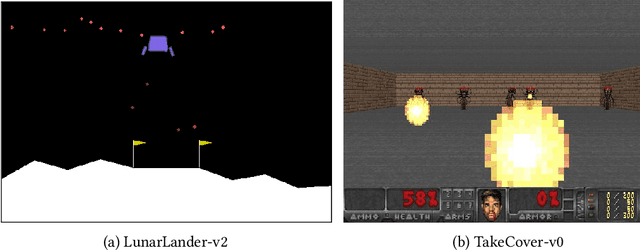
Model-Based Active Exploration
Oct 29, 2018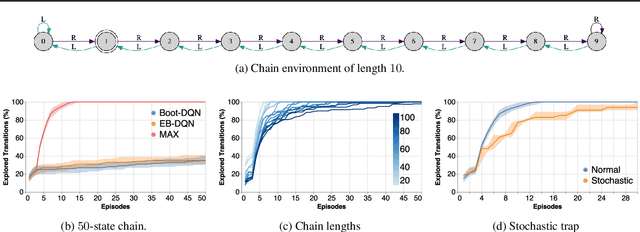
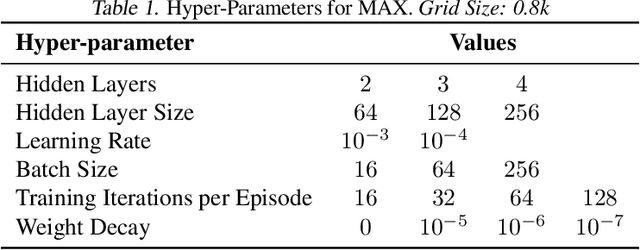
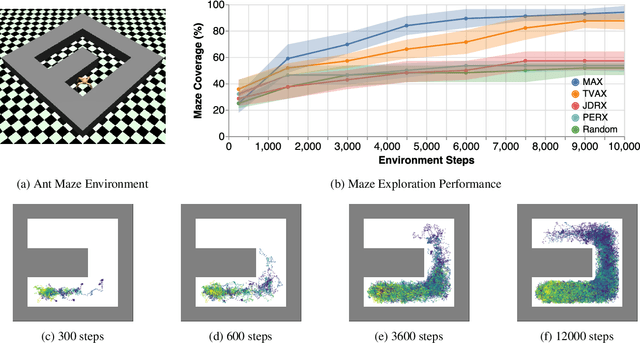
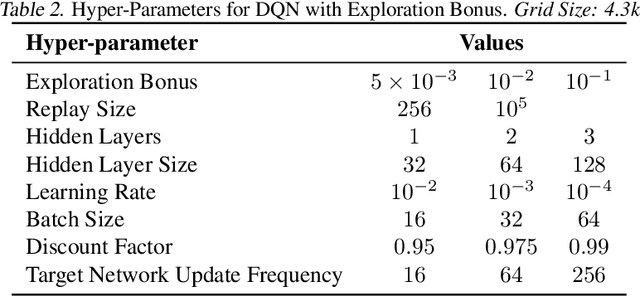
Efficient exploration is an unsolved problem in Reinforcement Learning. We introduce Model-Based Active eXploration (MAX), an algorithm that actively explores the environment. It minimizes data required to comprehensively model the environment by planning to observe novel events, instead of merely reacting to novelty encountered by chance. Non-stationarity induced by traditional exploration bonus techniques is avoided by constructing fresh exploration policies only at time of action. In semi-random toy environments where directed exploration is critical to make progress, our algorithm is at least an order of magnitude more efficient than strong baselines.