 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Efficient Training of Language Models to Fill in the Middle
Jul 28, 2022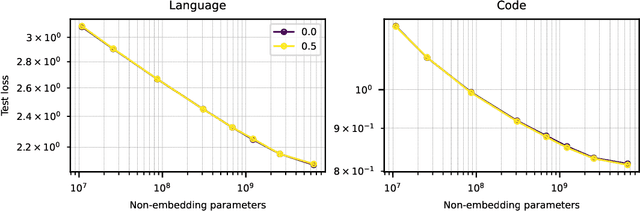
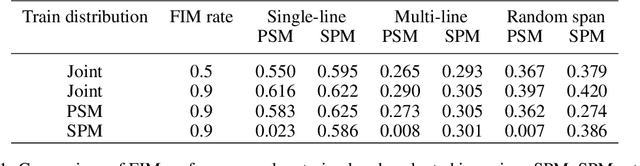
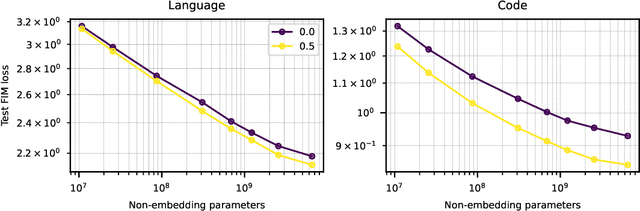

We show that autoregressive language models can learn to infill text after we apply a straightforward transformation to the dataset, which simply moves a span of text from the middle of a document to its end. While this data augmentation has garnered much interest in recent years, we provide extensive evidence that training models with a large fraction of data transformed in this way does not harm the original left-to-right generative capability, as measured by perplexity and sampling evaluations across a wide range of scales. Given the usefulness, simplicity, and efficiency of training models to fill-in-the-middle (FIM), we suggest that future autoregressive language models be trained with FIM by default. To this end, we run a series of ablations on key hyperparameters, such as the data transformation frequency, the structure of the transformation, and the method of selecting the infill span. We use these ablations to prescribe strong default settings and best practices to train FIM models. We have released our best infilling model trained with best practices in our API, and release our infilling benchmarks to aid future research.
Text and Code Embeddings by Contrastive Pre-Training
Jan 24, 2022
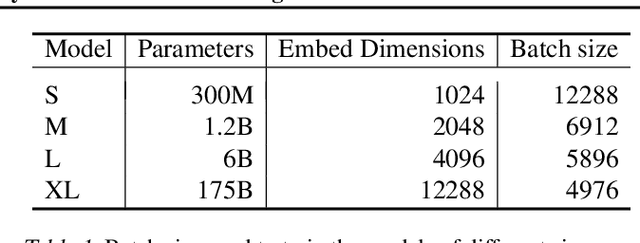
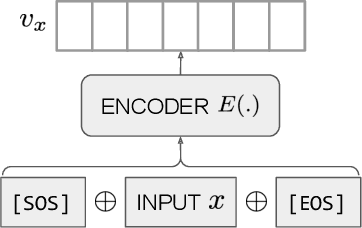
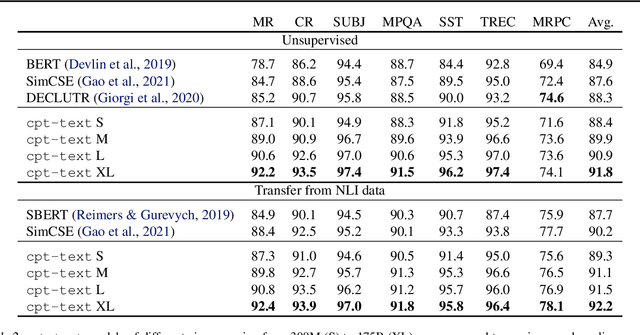
Text embeddings are useful features in many applications such as semantic search and computing text similarity. Previous work typically trains models customized for different use cases, varying in dataset choice, training objective and model architecture. In this work, we show that contrastive pre-training on unsupervised data at scale leads to high quality vector representations of text and code. The same unsupervised text embeddings that achieve new state-of-the-art results in linear-probe classification also display impressive semantic search capabilities and sometimes even perform competitively with fine-tuned models. On linear-probe classification accuracy averaging over 7 tasks, our best unsupervised model achieves a relative improvement of 4% and 1.8% over previous best unsupervised and supervised text embedding models respectively. The same text embeddings when evaluated on large-scale semantic search attains a relative improvement of 23.4%, 14.7%, and 10.6% over previous best unsupervised methods on MSMARCO, Natural Questions and TriviaQA benchmarks, respectively. Similarly to text embeddings, we train code embedding models on (text, code) pairs, obtaining a 20.8% relative improvement over prior best work on code search.
Evaluating Large Language Models Trained on Code
Jul 14, 2021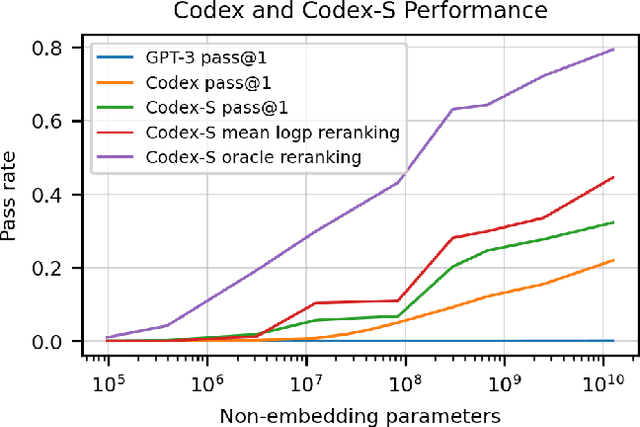
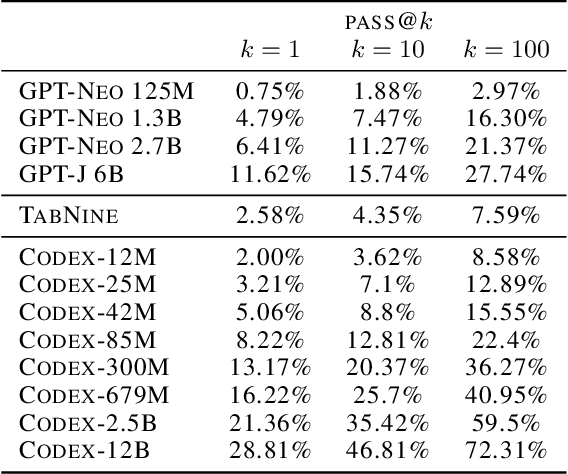
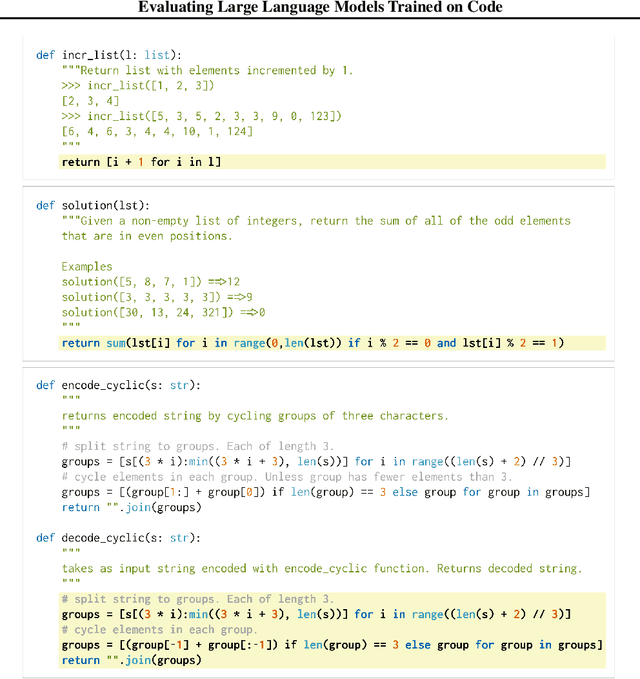
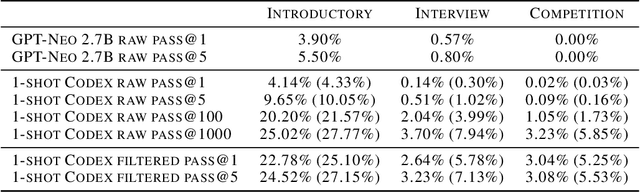
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Solving Rubik's Cube with a Robot Hand
Oct 16, 2019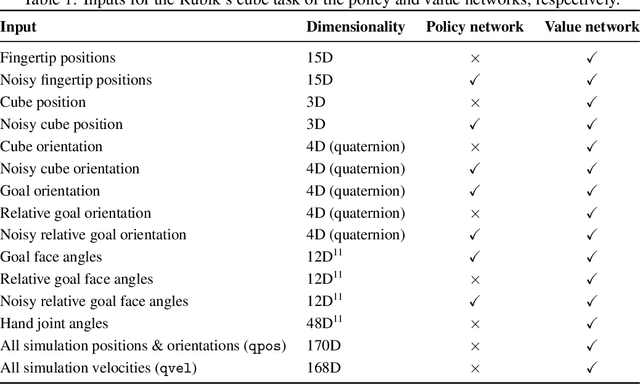
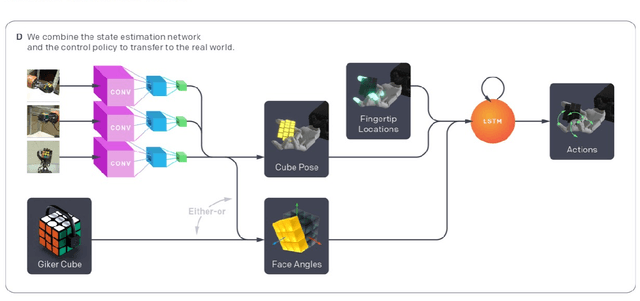
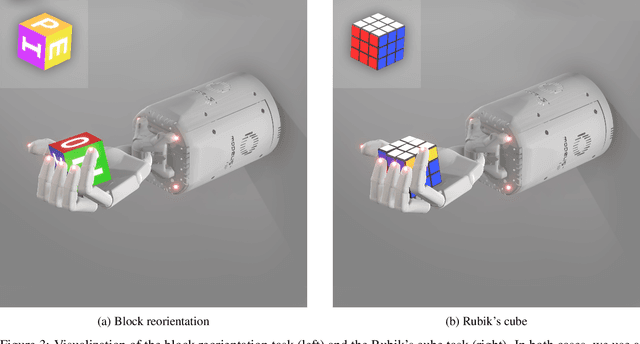
We demonstrate that models trained only in simulation can be used to solve a manipulation problem of unprecedented complexity on a real robot. This is made possible by two key components: a novel algorithm, which we call automatic domain randomization (ADR) and a robot platform built for machine learning. ADR automatically generates a distribution over randomized environments of ever-increasing difficulty. Control policies and vision state estimators trained with ADR exhibit vastly improved sim2real transfer. For control policies, memory-augmented models trained on an ADR-generated distribution of environments show clear signs of emergent meta-learning at test time. The combination of ADR with our custom robot platform allows us to solve a Rubik's cube with a humanoid robot hand, which involves both control and state estimation problems. Videos summarizing our results are available: https://openai.com/blog/solving-rubiks-cube/