 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProver-Verifier Games improve legibility of LLM outputs
Jul 18, 2024One way to increase confidence in the outputs of Large Language Models (LLMs) is to support them with reasoning that is clear and easy to check -- a property we call legibility. We study legibility in the context of solving grade-school math problems and show that optimizing chain-of-thought solutions only for answer correctness can make them less legible. To mitigate the loss in legibility, we propose a training algorithm inspired by Prover-Verifier Game from Anil et al. (2021). Our algorithm iteratively trains small verifiers to predict solution correctness, "helpful" provers to produce correct solutions that the verifier accepts, and "sneaky" provers to produce incorrect solutions that fool the verifier. We find that the helpful prover's accuracy and the verifier's robustness to adversarial attacks increase over the course of training. Furthermore, we show that legibility training transfers to time-constrained humans tasked with verifying solution correctness. Over course of LLM training human accuracy increases when checking the helpful prover's solutions, and decreases when checking the sneaky prover's solutions. Hence, training for checkability by small verifiers is a plausible technique for increasing output legibility. Our results suggest legibility training against small verifiers as a practical avenue for increasing legibility of large LLMs to humans, and thus could help with alignment of superhuman models.
Let's Verify Step by Step
May 31, 2023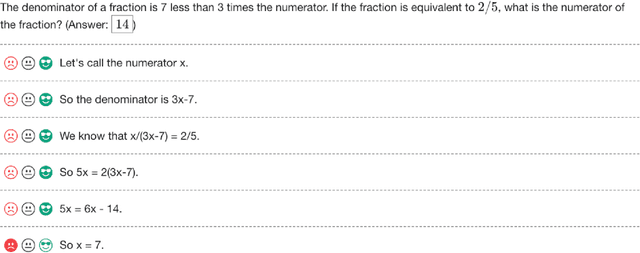
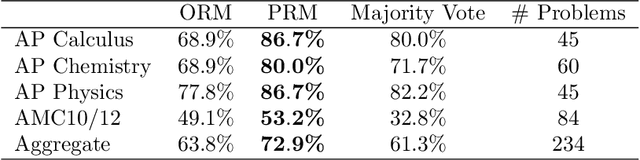
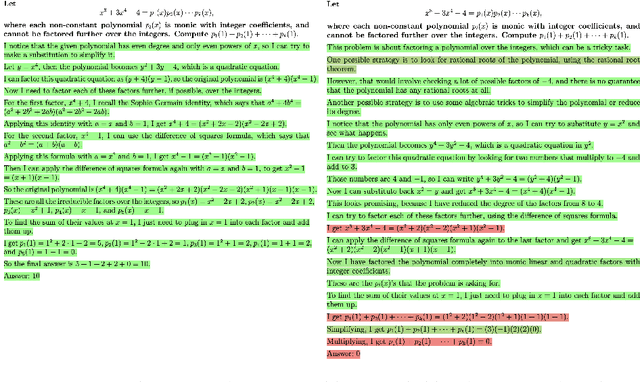
In recent years, large language models have greatly improved in their ability to perform complex multi-step reasoning. However, even state-of-the-art models still regularly produce logical mistakes. To train more reliable models, we can turn either to outcome supervision, which provides feedback for a final result, or process supervision, which provides feedback for each intermediate reasoning step. Given the importance of training reliable models, and given the high cost of human feedback, it is important to carefully compare the both methods. Recent work has already begun this comparison, but many questions still remain. We conduct our own investigation, finding that process supervision significantly outperforms outcome supervision for training models to solve problems from the challenging MATH dataset. Our process-supervised model solves 78% of problems from a representative subset of the MATH test set. Additionally, we show that active learning significantly improves the efficacy of process supervision. To support related research, we also release PRM800K, the complete dataset of 800,000 step-level human feedback labels used to train our best reward model.
AutoDIME: Automatic Design of Interesting Multi-Agent Environments
Mar 04, 2022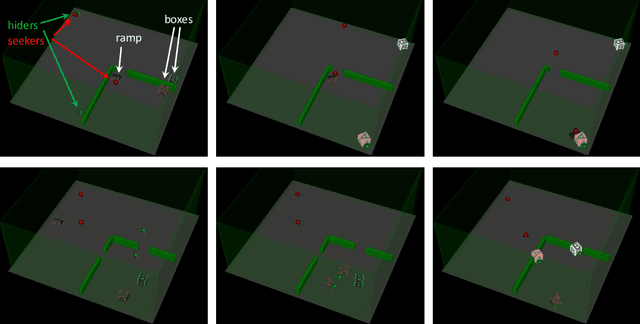
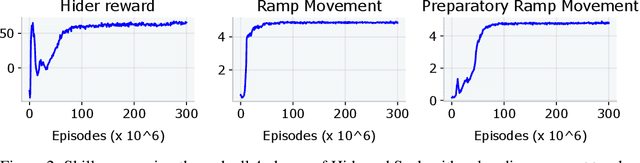
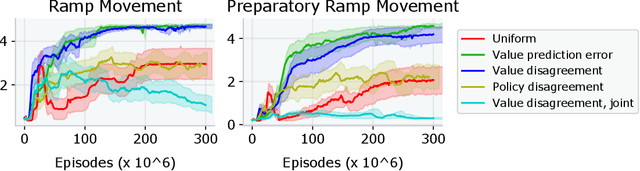
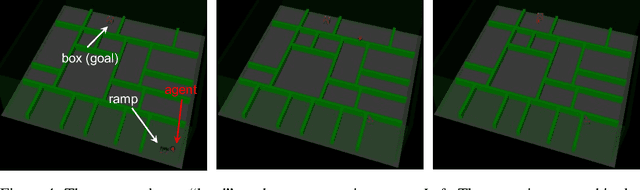
Designing a distribution of environments in which RL agents can learn interesting and useful skills is a challenging and poorly understood task, for multi-agent environments the difficulties are only exacerbated. One approach is to train a second RL agent, called a teacher, who samples environments that are conducive for the learning of student agents. However, most previous proposals for teacher rewards do not generalize straightforwardly to the multi-agent setting. We examine a set of intrinsic teacher rewards derived from prediction problems that can be applied in multi-agent settings and evaluate them in Mujoco tasks such as multi-agent Hide and Seek as well as a diagnostic single-agent maze task. Of the intrinsic rewards considered we found value disagreement to be most consistent across tasks, leading to faster and more reliable emergence of advanced skills in Hide and Seek and the maze task. Another candidate intrinsic reward considered, value prediction error, also worked well in Hide and Seek but was susceptible to noisy-TV style distractions in stochastic environments. Policy disagreement performed well in the maze task but did not speed up learning in Hide and Seek. Our results suggest that intrinsic teacher rewards, and in particular value disagreement, are a promising approach for automating both single and multi-agent environment design.
Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets
Jan 06, 2022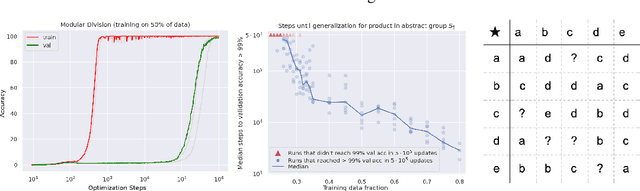
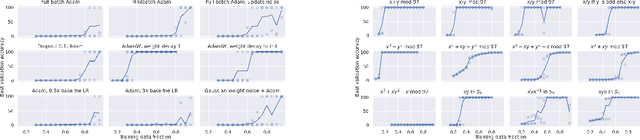
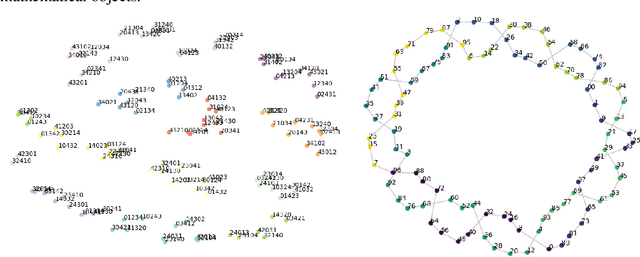
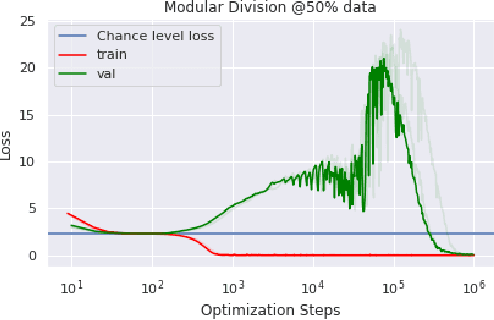
In this paper we propose to study generalization of neural networks on small algorithmically generated datasets. In this setting, questions about data efficiency, memorization, generalization, and speed of learning can be studied in great detail. In some situations we show that neural networks learn through a process of "grokking" a pattern in the data, improving generalization performance from random chance level to perfect generalization, and that this improvement in generalization can happen well past the point of overfitting. We also study generalization as a function of dataset size and find that smaller datasets require increasing amounts of optimization for generalization. We argue that these datasets provide a fertile ground for studying a poorly understood aspect of deep learning: generalization of overparametrized neural networks beyond memorization of the finite training dataset.
Evaluating Large Language Models Trained on Code
Jul 14, 2021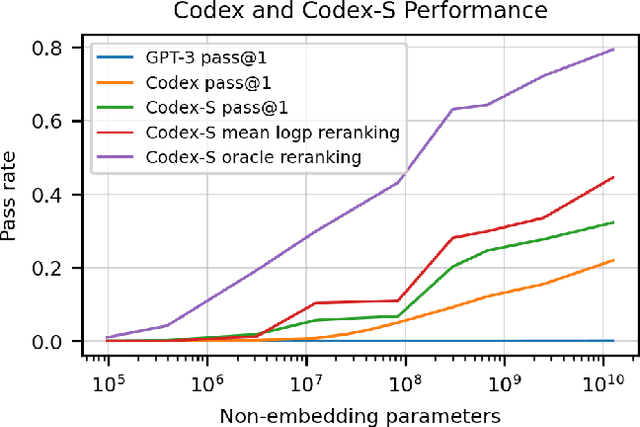
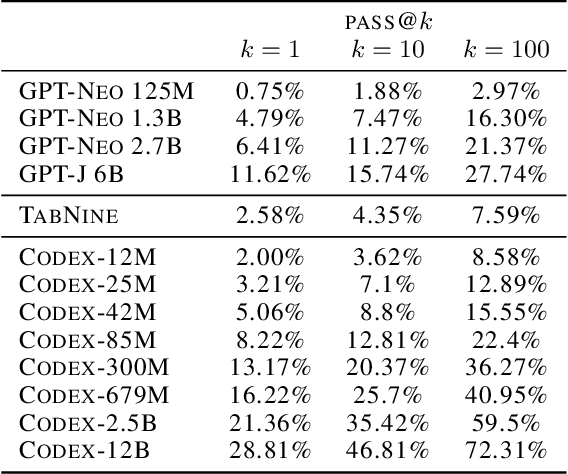
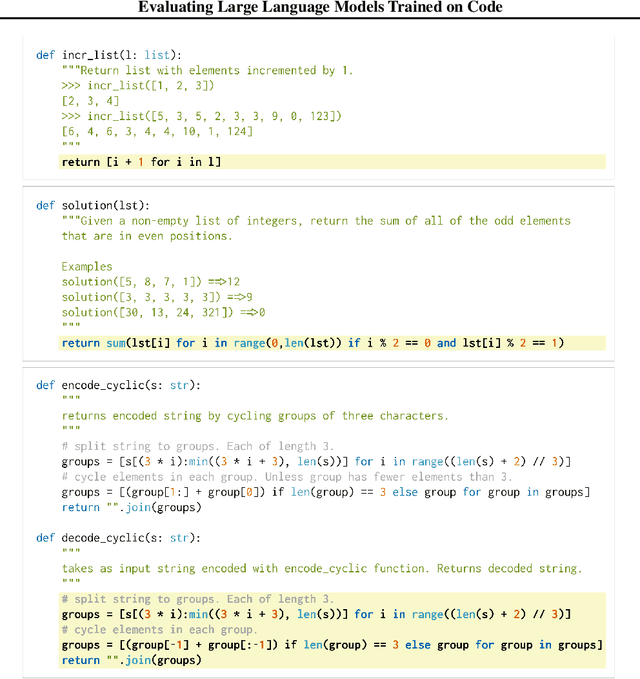
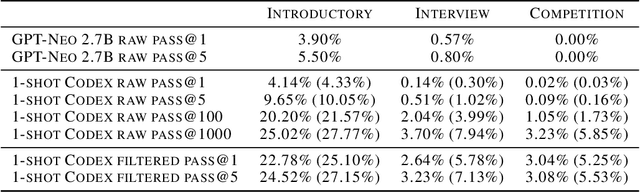
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Large-Scale Study of Curiosity-Driven Learning
Aug 13, 2018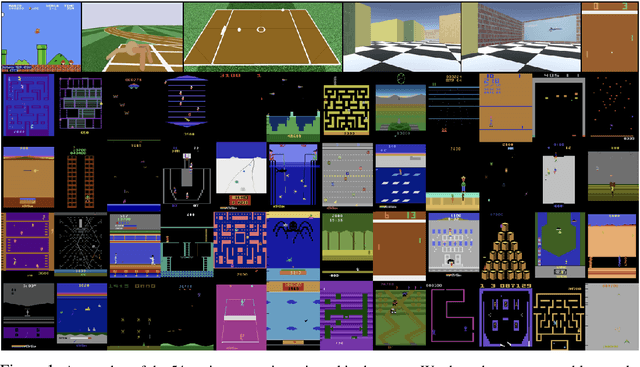
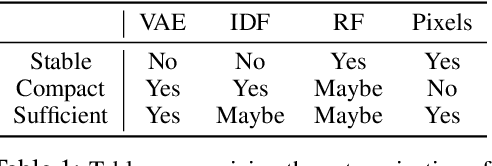
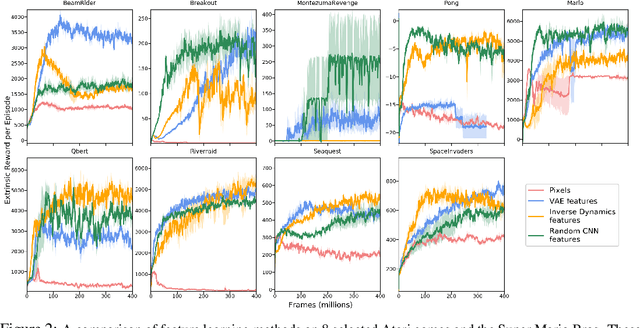

Reinforcement learning algorithms rely on carefully engineering environment rewards that are extrinsic to the agent. However, annotating each environment with hand-designed, dense rewards is not scalable, motivating the need for developing reward functions that are intrinsic to the agent. Curiosity is a type of intrinsic reward function which uses prediction error as reward signal. In this paper: (a) We perform the first large-scale study of purely curiosity-driven learning, i.e. without any extrinsic rewards, across 54 standard benchmark environments, including the Atari game suite. Our results show surprisingly good performance, and a high degree of alignment between the intrinsic curiosity objective and the hand-designed extrinsic rewards of many game environments. (b) We investigate the effect of using different feature spaces for computing prediction error and show that random features are sufficient for many popular RL game benchmarks, but learned features appear to generalize better (e.g. to novel game levels in Super Mario Bros.). (c) We demonstrate limitations of the prediction-based rewards in stochastic setups. Game-play videos and code are at https://pathak22.github.io/large-scale-curiosity/