 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Let's Verify Step by Step
May 31, 2023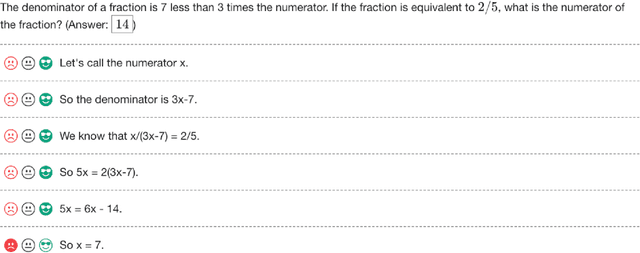
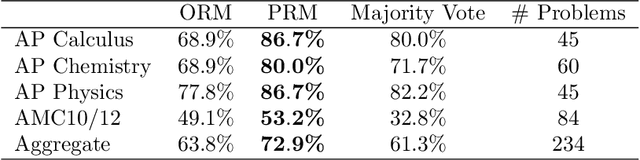
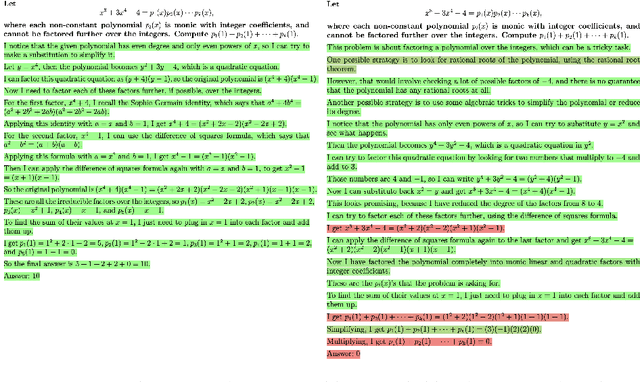
In recent years, large language models have greatly improved in their ability to perform complex multi-step reasoning. However, even state-of-the-art models still regularly produce logical mistakes. To train more reliable models, we can turn either to outcome supervision, which provides feedback for a final result, or process supervision, which provides feedback for each intermediate reasoning step. Given the importance of training reliable models, and given the high cost of human feedback, it is important to carefully compare the both methods. Recent work has already begun this comparison, but many questions still remain. We conduct our own investigation, finding that process supervision significantly outperforms outcome supervision for training models to solve problems from the challenging MATH dataset. Our process-supervised model solves 78% of problems from a representative subset of the MATH test set. Additionally, we show that active learning significantly improves the efficacy of process supervision. To support related research, we also release PRM800K, the complete dataset of 800,000 step-level human feedback labels used to train our best reward model.
WebGPT: Browser-assisted question-answering with human feedback
Dec 17, 2021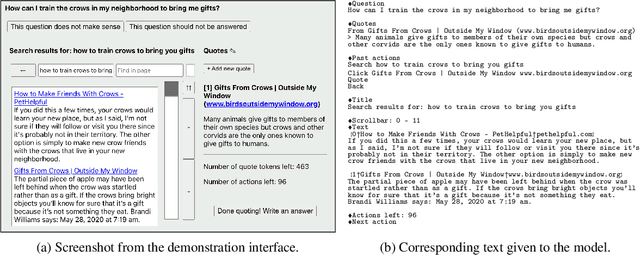
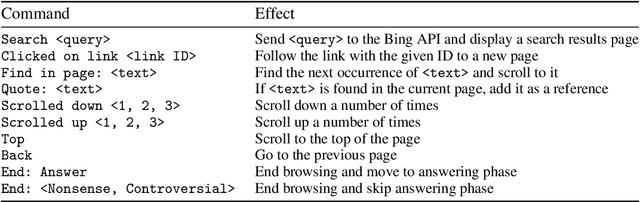
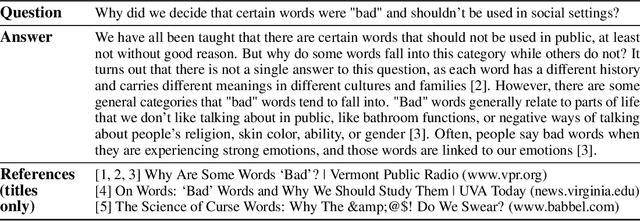
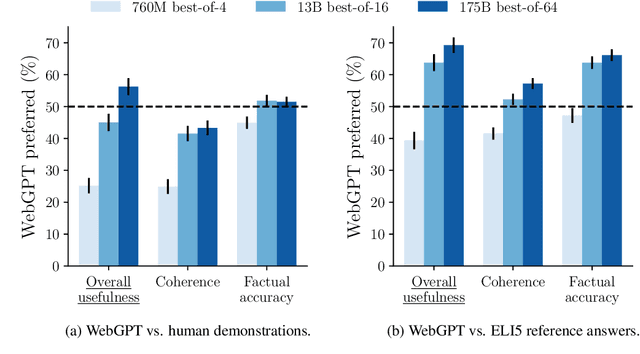
We fine-tune GPT-3 to answer long-form questions using a text-based web-browsing environment, which allows the model to search and navigate the web. By setting up the task so that it can be performed by humans, we are able to train models on the task using imitation learning, and then optimize answer quality with human feedback. To make human evaluation of factual accuracy easier, models must collect references while browsing in support of their answers. We train and evaluate our models on ELI5, a dataset of questions asked by Reddit users. Our best model is obtained by fine-tuning GPT-3 using behavior cloning, and then performing rejection sampling against a reward model trained to predict human preferences. This model's answers are preferred by humans 56% of the time to those of our human demonstrators, and 69% of the time to the highest-voted answer from Reddit.
Training Verifiers to Solve Math Word Problems
Nov 18, 2021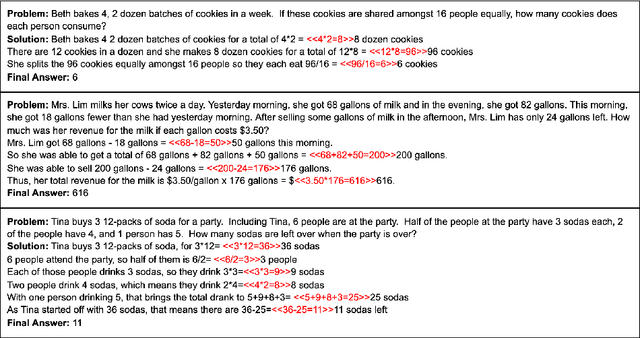
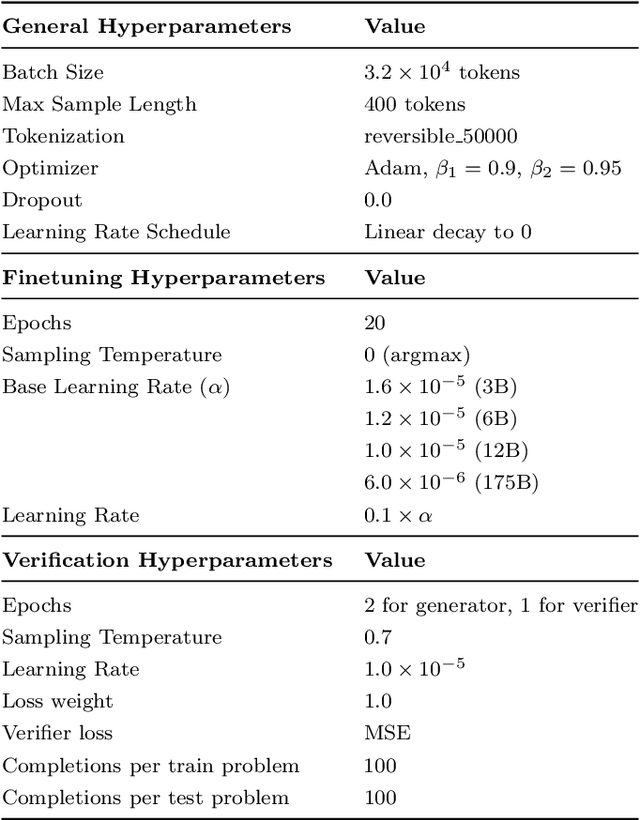
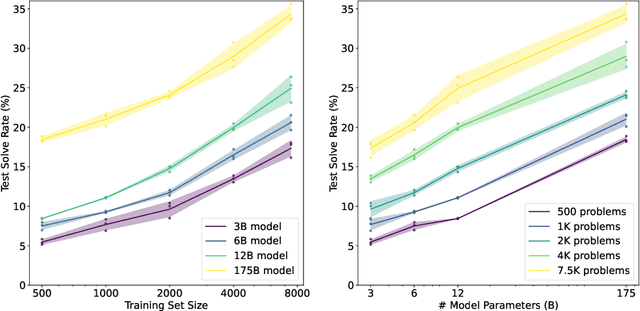
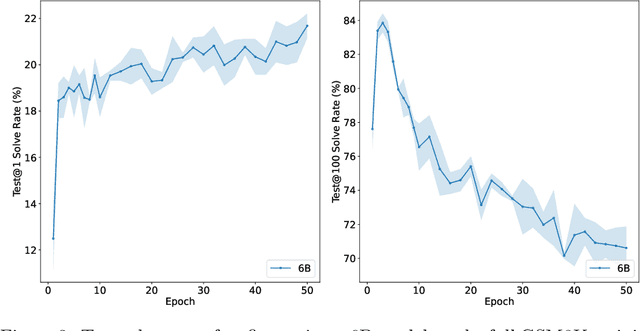
State-of-the-art language models can match human performance on many tasks, but they still struggle to robustly perform multi-step mathematical reasoning. To diagnose the failures of current models and support research, we introduce GSM8K, a dataset of 8.5K high quality linguistically diverse grade school math word problems. We find that even the largest transformer models fail to achieve high test performance, despite the conceptual simplicity of this problem distribution. To increase performance, we propose training verifiers to judge the correctness of model completions. At test time, we generate many candidate solutions and select the one ranked highest by the verifier. We demonstrate that verification significantly improves performance on GSM8K, and we provide strong empirical evidence that verification scales more effectively with increased data than a finetuning baseline.
Asymmetric self-play for automatic goal discovery in robotic manipulation
Jan 13, 2021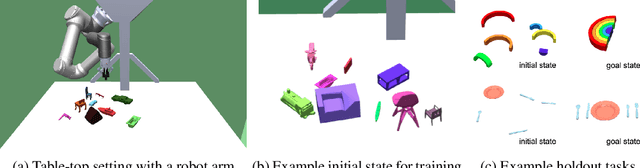
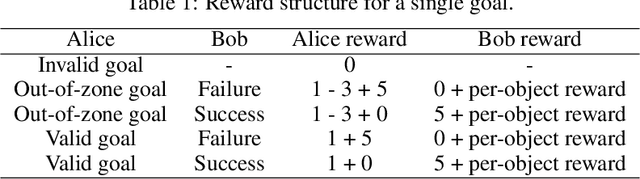
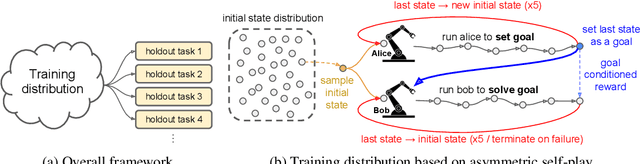
We train a single, goal-conditioned policy that can solve many robotic manipulation tasks, including tasks with previously unseen goals and objects. We rely on asymmetric self-play for goal discovery, where two agents, Alice and Bob, play a game. Alice is asked to propose challenging goals and Bob aims to solve them. We show that this method can discover highly diverse and complex goals without any human priors. Bob can be trained with only sparse rewards, because the interaction between Alice and Bob results in a natural curriculum and Bob can learn from Alice's trajectory when relabeled as a goal-conditioned demonstration. Finally, our method scales, resulting in a single policy that can generalize to many unseen tasks such as setting a table, stacking blocks, and solving simple puzzles. Videos of a learned policy is available at https://robotics-self-play.github.io.
Social-BiGAT: Multimodal Trajectory Forecasting using Bicycle-GAN and Graph Attention Networks
Jul 17, 2019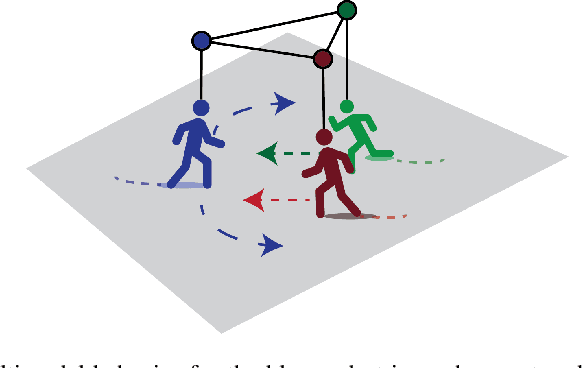
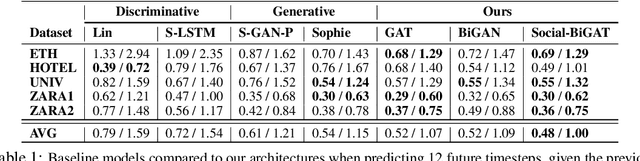
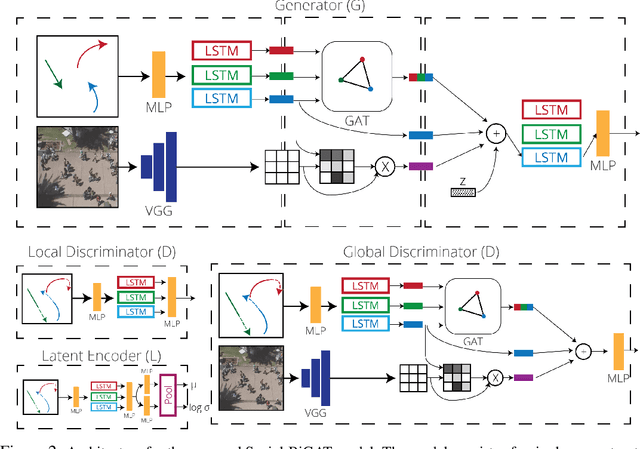
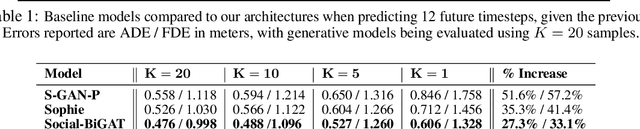
Predicting the future trajectories of multiple interacting agents in a scene has become an increasingly important problem for many different applications ranging from control of autonomous vehicles and social robots to security and surveillance. This problem is compounded by the presence of social interactions between humans and their physical interactions with the scene. While the existing literature has explored some of these cues, they mainly ignored the multimodal nature of each human's future trajectory. In this paper, we present Social-BiGAT, a graph-based generative adversarial network that generates realistic, multimodal trajectory predictions by better modelling the social interactions of pedestrians in a scene. Our method is based on a graph attention network (GAT) that learns reliable feature representations that encode the social interactions between humans in the scene, and a recurrent encoder-decoder architecture that is trained adversarially to predict, based on the features, the humans' paths. We explicitly account for the multimodal nature of the prediction problem by forming a reversible transformation between each scene and its latent noise vector, as in Bicycle-GAN. We show that our framework achieves state-of-the-art performance comparing it to several baselines on existing trajectory forecasting benchmarks.
SoPhie: An Attentive GAN for Predicting Paths Compliant to Social and Physical Constraints
Sep 20, 2018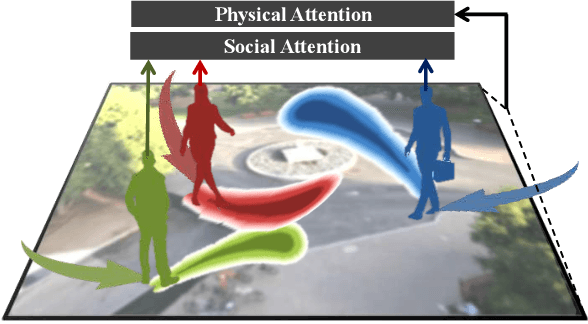
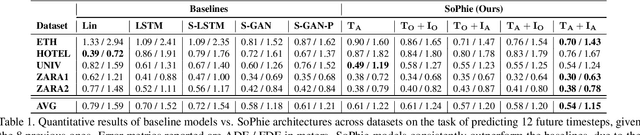
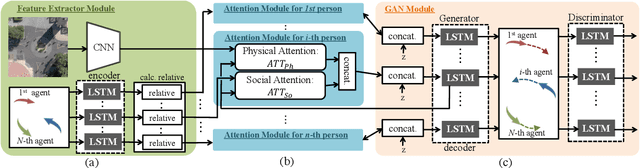

This paper addresses the problem of path prediction for multiple interacting agents in a scene, which is a crucial step for many autonomous platforms such as self-driving cars and social robots. We present \textit{SoPhie}; an interpretable framework based on Generative Adversarial Network (GAN), which leverages two sources of information, the path history of all the agents in a scene, and the scene context information, using images of the scene. To predict a future path for an agent, both physical and social information must be leveraged. Previous work has not been successful to jointly model physical and social interactions. Our approach blends a social attention mechanism with a physical attention that helps the model to learn where to look in a large scene and extract the most salient parts of the image relevant to the path. Whereas, the social attention component aggregates information across the different agent interactions and extracts the most important trajectory information from the surrounding neighbors. SoPhie also takes advantage of GAN to generates more realistic samples and to capture the uncertain nature of the future paths by modeling its distribution. All these mechanisms enable our approach to predict socially and physically plausible paths for the agents and to achieve state-of-the-art performance on several different trajectory forecasting benchmarks.