 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstitutional Classifiers++: Efficient Production-Grade Defenses against Universal Jailbreaks
Jan 08, 2026We introduce enhanced Constitutional Classifiers that deliver production-grade jailbreak robustness with dramatically reduced computational costs and refusal rates compared to previous-generation defenses. Our system combines several key insights. First, we develop exchange classifiers that evaluate model responses in their full conversational context, which addresses vulnerabilities in last-generation systems that examine outputs in isolation. Second, we implement a two-stage classifier cascade where lightweight classifiers screen all traffic and escalate only suspicious exchanges to more expensive classifiers. Third, we train efficient linear probe classifiers and ensemble them with external classifiers to simultaneously improve robustness and reduce computational costs. Together, these techniques yield a production-grade system achieving a 40x computational cost reduction compared to our baseline exchange classifier, while maintaining a 0.05% refusal rate on production traffic. Through extensive red-teaming comprising over 1,700 hours, we demonstrate strong protection against universal jailbreaks -- no attack on this system successfully elicited responses to all eight target queries comparable in detail to an undefended model. Our work establishes Constitutional Classifiers as practical and efficient safeguards for large language models.
Excess Description Length of Learning Generalizable Predictors
Jan 08, 2026Understanding whether fine-tuning elicits latent capabilities or teaches new ones is a fundamental question for language model evaluation and safety. We develop a formal information-theoretic framework for quantifying how much predictive structure fine-tuning extracts from the train dataset and writes into a model's parameters. Our central quantity, Excess Description Length (EDL), is defined via prequential coding and measures the gap between the bits required to encode training labels sequentially using an evolving model (trained online) and the residual encoding cost under the final trained model. We establish that EDL is non-negative in expectation, converges to surplus description length in the infinite-data limit, and provides bounds on expected generalization gain. Through a series of toy models, we clarify common confusions about information in learning: why random labels yield EDL near zero, how a single example can eliminate many bits of uncertainty about the underlying rule(s) that describe the data distribution, why structure learned on rare inputs contributes proportionally little to expected generalization, and how format learning creates early transients distinct from capability acquisition. This framework provides rigorous foundations for the empirical observation that capability elicitation and teaching exhibit qualitatively distinct scaling signatures.
Unsupervised Elicitation of Language Models
Jun 11, 2025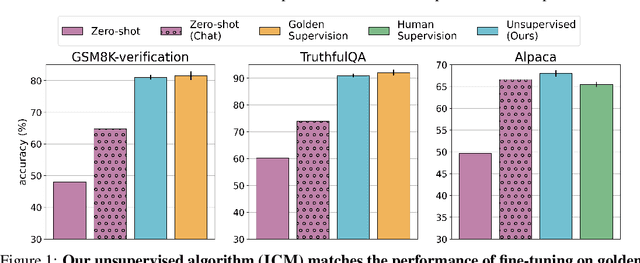
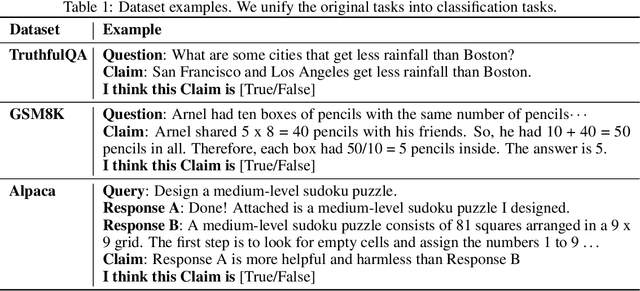
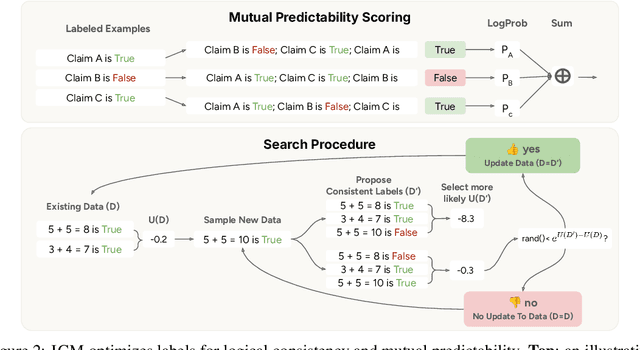

To steer pretrained language models for downstream tasks, today's post-training paradigm relies on humans to specify desired behaviors. However, for models with superhuman capabilities, it is difficult or impossible to get high-quality human supervision. To address this challenge, we introduce a new unsupervised algorithm, Internal Coherence Maximization (ICM), to fine-tune pretrained language models on their own generated labels, \emph{without external supervision}. On GSM8k-verification, TruthfulQA, and Alpaca reward modeling tasks, our method matches the performance of training on golden supervision and outperforms training on crowdsourced human supervision. On tasks where LMs' capabilities are strongly superhuman, our method can elicit those capabilities significantly better than training on human labels. Finally, we show that our method can improve the training of frontier LMs: we use our method to train an unsupervised reward model and use reinforcement learning to train a Claude 3.5 Haiku-based assistant. Both the reward model and the assistant outperform their human-supervised counterparts.
Reasoning Models Don't Always Say What They Think
May 08, 2025



Chain-of-thought (CoT) offers a potential boon for AI safety as it allows monitoring a model's CoT to try to understand its intentions and reasoning processes. However, the effectiveness of such monitoring hinges on CoTs faithfully representing models' actual reasoning processes. We evaluate CoT faithfulness of state-of-the-art reasoning models across 6 reasoning hints presented in the prompts and find: (1) for most settings and models tested, CoTs reveal their usage of hints in at least 1% of examples where they use the hint, but the reveal rate is often below 20%, (2) outcome-based reinforcement learning initially improves faithfulness but plateaus without saturating, and (3) when reinforcement learning increases how frequently hints are used (reward hacking), the propensity to verbalize them does not increase, even without training against a CoT monitor. These results suggest that CoT monitoring is a promising way of noticing undesired behaviors during training and evaluations, but that it is not sufficient to rule them out. They also suggest that in settings like ours where CoT reasoning is not necessary, test-time monitoring of CoTs is unlikely to reliably catch rare and catastrophic unexpected behaviors.
Auditing language models for hidden objectives
Mar 14, 2025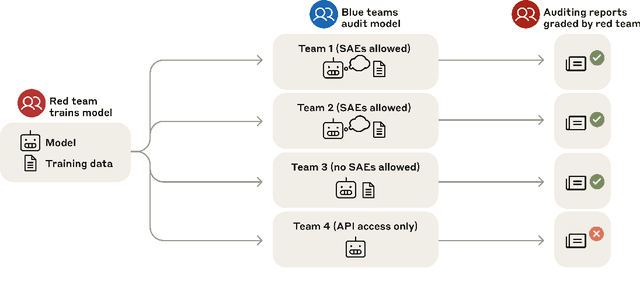


We study the feasibility of conducting alignment audits: investigations into whether models have undesired objectives. As a testbed, we train a language model with a hidden objective. Our training pipeline first teaches the model about exploitable errors in RLHF reward models (RMs), then trains the model to exploit some of these errors. We verify via out-of-distribution evaluations that the model generalizes to exhibit whatever behaviors it believes RMs rate highly, including ones not reinforced during training. We leverage this model to study alignment audits in two ways. First, we conduct a blind auditing game where four teams, unaware of the model's hidden objective or training, investigate it for concerning behaviors and their causes. Three teams successfully uncovered the model's hidden objective using techniques including interpretability with sparse autoencoders (SAEs), behavioral attacks, and training data analysis. Second, we conduct an unblinded follow-up study of eight techniques for auditing the model, analyzing their strengths and limitations. Overall, our work provides a concrete example of using alignment audits to discover a model's hidden objective and proposes a methodology for practicing and validating progress in alignment auditing.
Forecasting Rare Language Model Behaviors
Feb 24, 2025
Standard language model evaluations can fail to capture risks that emerge only at deployment scale. For example, a model may produce safe responses during a small-scale beta test, yet reveal dangerous information when processing billions of requests at deployment. To remedy this, we introduce a method to forecast potential risks across orders of magnitude more queries than we test during evaluation. We make forecasts by studying each query's elicitation probability -- the probability the query produces a target behavior -- and demonstrate that the largest observed elicitation probabilities predictably scale with the number of queries. We find that our forecasts can predict the emergence of diverse undesirable behaviors -- such as assisting users with dangerous chemical synthesis or taking power-seeking actions -- across up to three orders of magnitude of query volume. Our work enables model developers to proactively anticipate and patch rare failures before they manifest during large-scale deployments.
Constitutional Classifiers: Defending against Universal Jailbreaks across Thousands of Hours of Red Teaming
Jan 31, 2025



Large language models (LLMs) are vulnerable to universal jailbreaks-prompting strategies that systematically bypass model safeguards and enable users to carry out harmful processes that require many model interactions, like manufacturing illegal substances at scale. To defend against these attacks, we introduce Constitutional Classifiers: safeguards trained on synthetic data, generated by prompting LLMs with natural language rules (i.e., a constitution) specifying permitted and restricted content. In over 3,000 estimated hours of red teaming, no red teamer found a universal jailbreak that could extract information from an early classifier-guarded LLM at a similar level of detail to an unguarded model across most target queries. On automated evaluations, enhanced classifiers demonstrated robust defense against held-out domain-specific jailbreaks. These classifiers also maintain deployment viability, with an absolute 0.38% increase in production-traffic refusals and a 23.7% inference overhead. Our work demonstrates that defending against universal jailbreaks while maintaining practical deployment viability is tractable.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Prover-Verifier Games improve legibility of LLM outputs
Jul 18, 2024One way to increase confidence in the outputs of Large Language Models (LLMs) is to support them with reasoning that is clear and easy to check -- a property we call legibility. We study legibility in the context of solving grade-school math problems and show that optimizing chain-of-thought solutions only for answer correctness can make them less legible. To mitigate the loss in legibility, we propose a training algorithm inspired by Prover-Verifier Game from Anil et al. (2021). Our algorithm iteratively trains small verifiers to predict solution correctness, "helpful" provers to produce correct solutions that the verifier accepts, and "sneaky" provers to produce incorrect solutions that fool the verifier. We find that the helpful prover's accuracy and the verifier's robustness to adversarial attacks increase over the course of training. Furthermore, we show that legibility training transfers to time-constrained humans tasked with verifying solution correctness. Over course of LLM training human accuracy increases when checking the helpful prover's solutions, and decreases when checking the sneaky prover's solutions. Hence, training for checkability by small verifiers is a plausible technique for increasing output legibility. Our results suggest legibility training against small verifiers as a practical avenue for increasing legibility of large LLMs to humans, and thus could help with alignment of superhuman models.
LLM Critics Help Catch LLM Bugs
Jun 28, 2024Reinforcement learning from human feedback (RLHF) is fundamentally limited by the capacity of humans to correctly evaluate model output. To improve human evaluation ability and overcome that limitation this work trains "critic" models that help humans to more accurately evaluate model-written code. These critics are themselves LLMs trained with RLHF to write natural language feedback highlighting problems in code from real-world assistant tasks. On code containing naturally occurring LLM errors model-written critiques are preferred over human critiques in 63% of cases, and human evaluation finds that models catch more bugs than human contractors paid for code review. We further confirm that our fine-tuned LLM critics can successfully identify hundreds of errors in ChatGPT training data rated as "flawless", even though the majority of those tasks are non-code tasks and thus out-of-distribution for the critic model. Critics can have limitations of their own, including hallucinated bugs that could mislead humans into making mistakes they might have otherwise avoided, but human-machine teams of critics and contractors catch similar numbers of bugs to LLM critics while hallucinating less than LLMs alone.