 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Elicitation of Language Models
Jun 11, 2025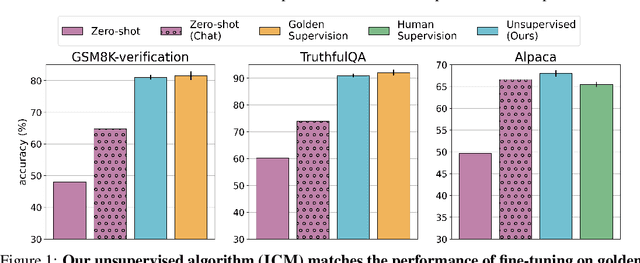

To steer pretrained language models for downstream tasks, today's post-training paradigm relies on humans to specify desired behaviors. However, for models with superhuman capabilities, it is difficult or impossible to get high-quality human supervision. To address this challenge, we introduce a new unsupervised algorithm, Internal Coherence Maximization (ICM), to fine-tune pretrained language models on their own generated labels, \emph{without external supervision}. On GSM8k-verification, TruthfulQA, and Alpaca reward modeling tasks, our method matches the performance of training on golden supervision and outperforms training on crowdsourced human supervision. On tasks where LMs' capabilities are strongly superhuman, our method can elicit those capabilities significantly better than training on human labels. Finally, we show that our method can improve the training of frontier LMs: we use our method to train an unsupervised reward model and use reinforcement learning to train a Claude 3.5 Haiku-based assistant. Both the reward model and the assistant outperform their human-supervised counterparts.
Constitutional Classifiers: Defending against Universal Jailbreaks across Thousands of Hours of Red Teaming
Jan 31, 2025



Large language models (LLMs) are vulnerable to universal jailbreaks-prompting strategies that systematically bypass model safeguards and enable users to carry out harmful processes that require many model interactions, like manufacturing illegal substances at scale. To defend against these attacks, we introduce Constitutional Classifiers: safeguards trained on synthetic data, generated by prompting LLMs with natural language rules (i.e., a constitution) specifying permitted and restricted content. In over 3,000 estimated hours of red teaming, no red teamer found a universal jailbreak that could extract information from an early classifier-guarded LLM at a similar level of detail to an unguarded model across most target queries. On automated evaluations, enhanced classifiers demonstrated robust defense against held-out domain-specific jailbreaks. These classifiers also maintain deployment viability, with an absolute 0.38% increase in production-traffic refusals and a 23.7% inference overhead. Our work demonstrates that defending against universal jailbreaks while maintaining practical deployment viability is tractable.
Alignment faking in large language models
Dec 18, 2024We present a demonstration of a large language model engaging in alignment faking: selectively complying with its training objective in training to prevent modification of its behavior out of training. First, we give Claude 3 Opus a system prompt stating it is being trained to answer all queries, even harmful ones, which conflicts with its prior training to refuse such queries. To allow the model to infer when it is in training, we say it will be trained only on conversations with free users, not paid users. We find the model complies with harmful queries from free users 14% of the time, versus almost never for paid users. Explaining this gap, in almost all cases where the model complies with a harmful query from a free user, we observe explicit alignment-faking reasoning, with the model stating it is strategically answering harmful queries in training to preserve its preferred harmlessness behavior out of training. Next, we study a more realistic setting where information about the training process is provided not in a system prompt, but by training on synthetic documents that mimic pre-training data--and observe similar alignment faking. Finally, we study the effect of actually training the model to comply with harmful queries via reinforcement learning, which we find increases the rate of alignment-faking reasoning to 78%, though also increases compliance even out of training. We additionally observe other behaviors such as the model exfiltrating its weights when given an easy opportunity. While we made alignment faking easier by telling the model when and by what criteria it was being trained, we did not instruct the model to fake alignment or give it any explicit goal. As future models might infer information about their training process without being told, our results suggest a risk of alignment faking in future models, whether due to a benign preference--as in this case--or not.
Ethics and Creativity in Computer Vision
Dec 06, 2021This paper offers a retrospective of what we learnt from organizing the workshop *Ethical Considerations in Creative applications of Computer Vision* at CVPR 2021 conference and, prior to that, a series of workshops on *Computer Vision for Fashion, Art and Design* at ECCV 2018, ICCV 2019, and CVPR 2020. We hope this reflection will bring artists and machine learning researchers into conversation around the ethical and social dimensions of creative applications of computer vision.
* Neural Information Processing System 2021 workshop on Machine Learning for Creativity and Design
gradSim: Differentiable simulation for system identification and visuomotor control
Apr 06, 2021
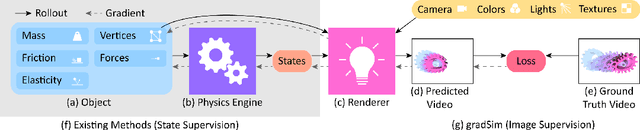
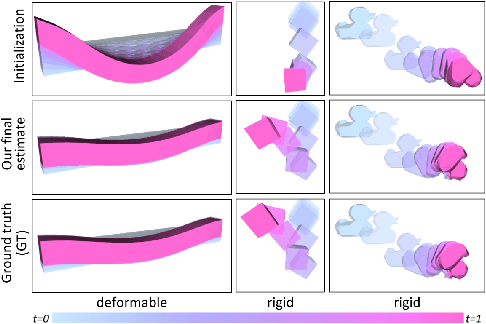

We consider the problem of estimating an object's physical properties such as mass, friction, and elasticity directly from video sequences. Such a system identification problem is fundamentally ill-posed due to the loss of information during image formation. Current solutions require precise 3D labels which are labor-intensive to gather, and infeasible to create for many systems such as deformable solids or cloth. We present gradSim, a framework that overcomes the dependence on 3D supervision by leveraging differentiable multiphysics simulation and differentiable rendering to jointly model the evolution of scene dynamics and image formation. This novel combination enables backpropagation from pixels in a video sequence through to the underlying physical attributes that generated them. Moreover, our unified computation graph -- spanning from the dynamics and through the rendering process -- enables learning in challenging visuomotor control tasks, without relying on state-based (3D) supervision, while obtaining performance competitive to or better than techniques that rely on precise 3D labels.
Zero-Shot Learning from scratch (ZFS): leveraging local compositional representations
Oct 22, 2020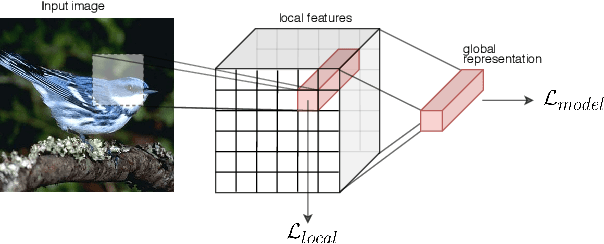
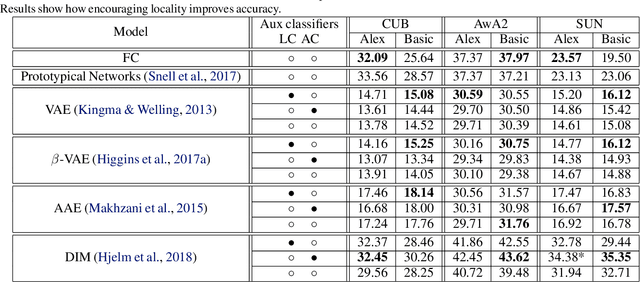
Zero-shot classification is a generalization task where no instance from the target classes is seen during training. To allow for test-time transfer, each class is annotated with semantic information, commonly in the form of attributes or text descriptions. While classical zero-shot learning does not explicitly forbid using information from other datasets, the approaches that achieve the best absolute performance on image benchmarks rely on features extracted from encoders pretrained on Imagenet. This approach relies on hyper-optimized Imagenet-relevant parameters from the supervised classification setting, entangling important questions about the suitability of those parameters and how they were learned with more fundamental questions about representation learning and generalization. To remove these distractors, we propose a more challenging setting: Zero-Shot Learning from scratch (ZFS), which explicitly forbids the use of encoders fine-tuned on other datasets. Our analysis on this setting highlights the importance of local information, and compositional representations.
Locality and compositionality in zero-shot learning
Dec 20, 2019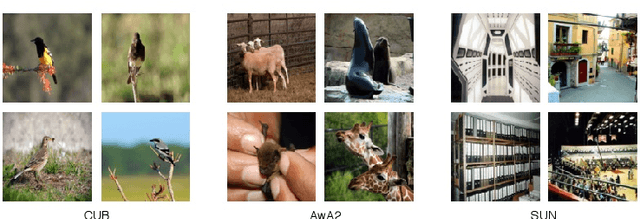

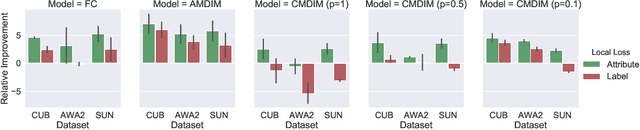
In this work we study locality and compositionality in the context of learning representations for Zero Shot Learning (ZSL). In order to well-isolate the importance of these properties in learned representations, we impose the additional constraint that, differently from most recent work in ZSL, no pre-training on different datasets (e.g. ImageNet) is performed. The results of our experiments show how locality, in terms of small parts of the input, and compositionality, i.e. how well can the learned representations be expressed as a function of a smaller vocabulary, are both deeply related to generalization and motivate the focus on more local-aware models in future research directions for representation learning.