 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Design Space of Tri-Modal Masked Diffusion Models
Feb 25, 2026Discrete diffusion models have emerged as strong alternatives to autoregressive language models, with recent work initializing and fine-tuning a base unimodal model for bimodal generation. Diverging from previous approaches, we introduce the first tri-modal masked diffusion model pretrained from scratch on text, image-text, and audio-text data. We systematically analyze multimodal scaling laws, modality mixing ratios, noise schedules, and batch-size effects, and we provide optimized inference sampling defaults. Our batch-size analysis yields a novel stochastic differential equation (SDE)-based reparameterization that eliminates the need for tuning the optimal batch size as reported in recent work. This reparameterization decouples the physical batch size, often chosen based on compute constraints (GPU saturation, FLOP efficiency, wall-clock time), from the logical batch size, chosen to balance gradient variance during stochastic optimization. Finally, we pretrain a preliminary 3B-parameter tri-modal model on 6.4T tokens, demonstrating the capabilities of a unified design and achieving strong results in text generation, text-to-image tasks, and text-to-speech tasks. Our work represents the largest-scale systematic open study of multimodal discrete diffusion models conducted to date, providing insights into scaling behaviors across multiple modalities.
GRACE: A Language Model Framework for Explainable Inverse Reinforcement Learning
Oct 02, 2025Inverse Reinforcement Learning aims to recover reward models from expert demonstrations, but traditional methods yield "black-box" models that are difficult to interpret and debug. In this work, we introduce GRACE (Generating Rewards As CodE), a method for using Large Language Models within an evolutionary search to reverse-engineer an interpretable, code-based reward function directly from expert trajectories. The resulting reward function is executable code that can be inspected and verified. We empirically validate GRACE on the BabyAI and AndroidWorld benchmarks, where it efficiently learns highly accurate rewards, even in complex, multi-task settings. Further, we demonstrate that the resulting reward leads to strong policies, compared to both competitive Imitation Learning and online RL approaches with ground-truth rewards. Finally, we show that GRACE is able to build complex reward APIs in multi-task setups.
From Multimodal LLMs to Generalist Embodied Agents: Methods and Lessons
Dec 11, 2024We examine the capability of Multimodal Large Language Models (MLLMs) to tackle diverse domains that extend beyond the traditional language and vision tasks these models are typically trained on. Specifically, our focus lies in areas such as Embodied AI, Games, UI Control, and Planning. To this end, we introduce a process of adapting an MLLM to a Generalist Embodied Agent (GEA). GEA is a single unified model capable of grounding itself across these varied domains through a multi-embodiment action tokenizer. GEA is trained with supervised learning on a large dataset of embodied experiences and with online RL in interactive simulators. We explore the data and algorithmic choices necessary to develop such a model. Our findings reveal the importance of training with cross-domain data and online RL for building generalist agents. The final GEA model achieves strong generalization performance to unseen tasks across diverse benchmarks compared to other generalist models and benchmark-specific approaches.
On the Modeling Capabilities of Large Language Models for Sequential Decision Making
Oct 08, 2024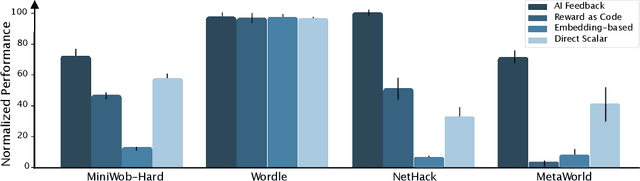
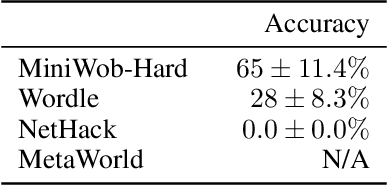
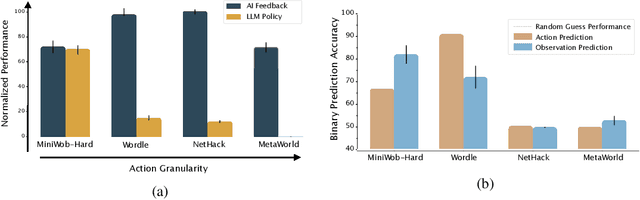
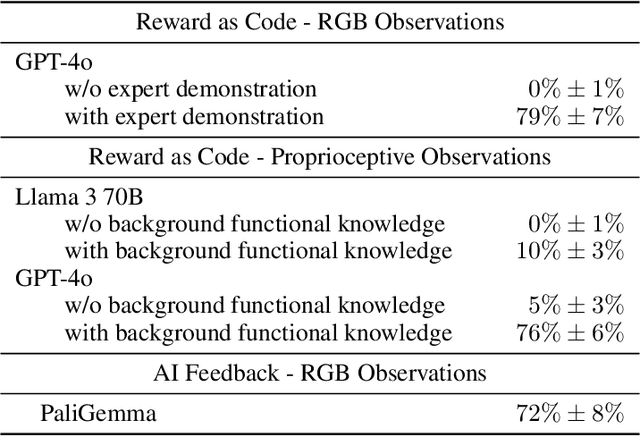
Large pretrained models are showing increasingly better performance in reasoning and planning tasks across different modalities, opening the possibility to leverage them for complex sequential decision making problems. In this paper, we investigate the capabilities of Large Language Models (LLMs) for reinforcement learning (RL) across a diversity of interactive domains. We evaluate their ability to produce decision-making policies, either directly, by generating actions, or indirectly, by first generating reward models to train an agent with RL. Our results show that, even without task-specific fine-tuning, LLMs excel at reward modeling. In particular, crafting rewards through artificial intelligence (AI) feedback yields the most generally applicable approach and can enhance performance by improving credit assignment and exploration. Finally, in environments with unfamiliar dynamics, we explore how fine-tuning LLMs with synthetic data can significantly improve their reward modeling capabilities while mitigating catastrophic forgetting, further broadening their utility in sequential decision-making tasks.
Grounding Multimodal Large Language Models in Actions
Jun 12, 2024



Multimodal Large Language Models (MLLMs) have demonstrated a wide range of capabilities across many domains, including Embodied AI. In this work, we study how to best ground a MLLM into different embodiments and their associated action spaces, with the goal of leveraging the multimodal world knowledge of the MLLM. We first generalize a number of methods through a unified architecture and the lens of action space adaptors. For continuous actions, we show that a learned tokenization allows for sufficient modeling precision, yielding the best performance on downstream tasks. For discrete actions, we demonstrate that semantically aligning these actions with the native output token space of the MLLM leads to the strongest performance. We arrive at these lessons via a thorough study of seven action space adapters on five different environments, encompassing over 114 embodied tasks.
Poly-View Contrastive Learning
Mar 08, 2024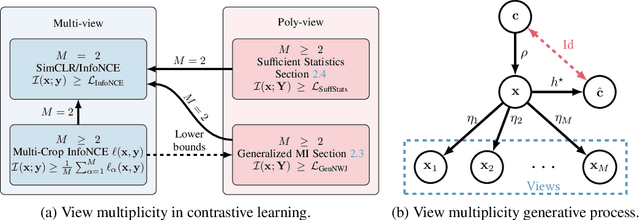
Contrastive learning typically matches pairs of related views among a number of unrelated negative views. Views can be generated (e.g. by augmentations) or be observed. We investigate matching when there are more than two related views which we call poly-view tasks, and derive new representation learning objectives using information maximization and sufficient statistics. We show that with unlimited computation, one should maximize the number of related views, and with a fixed compute budget, it is beneficial to decrease the number of unique samples whilst increasing the number of views of those samples. In particular, poly-view contrastive models trained for 128 epochs with batch size 256 outperform SimCLR trained for 1024 epochs at batch size 4096 on ImageNet1k, challenging the belief that contrastive models require large batch sizes and many training epochs.
Large Language Models as Generalizable Policies for Embodied Tasks
Oct 26, 2023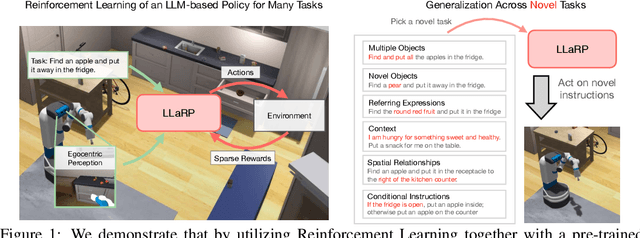
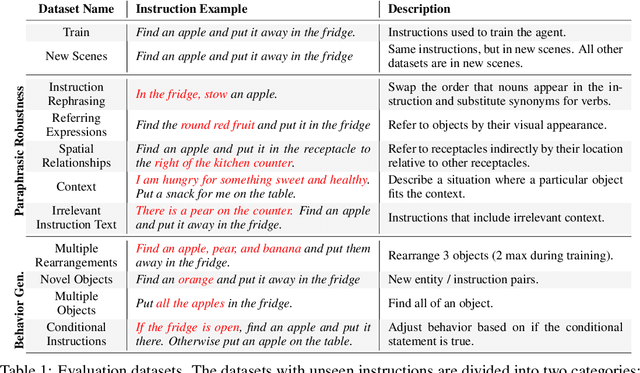
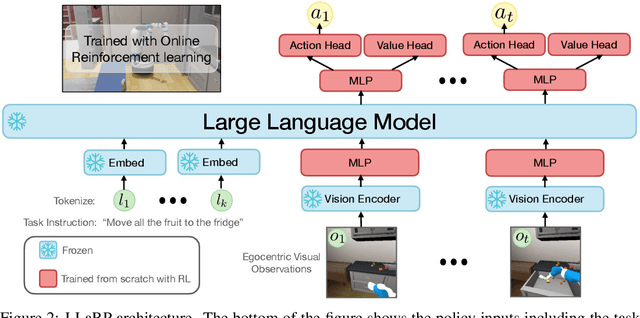
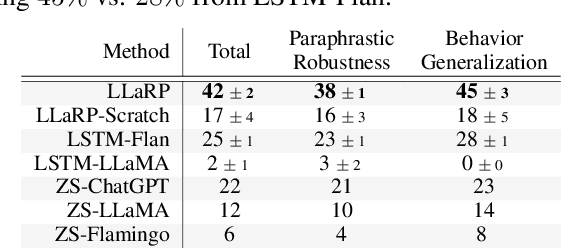
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
Value function estimation using conditional diffusion models for control
Jun 09, 2023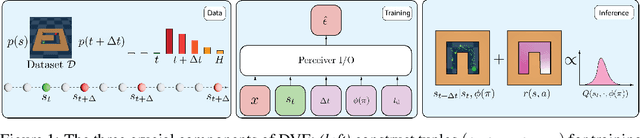
A fairly reliable trend in deep reinforcement learning is that the performance scales with the number of parameters, provided a complimentary scaling in amount of training data. As the appetite for large models increases, it is imperative to address, sooner than later, the potential problem of running out of high-quality demonstrations. In this case, instead of collecting only new data via costly human demonstrations or risking a simulation-to-real transfer with uncertain effects, it would be beneficial to leverage vast amounts of readily-available low-quality data. Since classical control algorithms such as behavior cloning or temporal difference learning cannot be used on reward-free or action-free data out-of-the-box, this solution warrants novel training paradigms for continuous control. We propose a simple algorithm called Diffused Value Function (DVF), which learns a joint multi-step model of the environment-robot interaction dynamics using a diffusion model. This model can be efficiently learned from state sequences (i.e., without access to reward functions nor actions), and subsequently used to estimate the value of each action out-of-the-box. We show how DVF can be used to efficiently capture the state visitation measure for multiple controllers, and show promising qualitative and quantitative results on challenging robotics benchmarks.
Predicting Unreliable Predictions by Shattering a Neural Network
Jun 15, 2021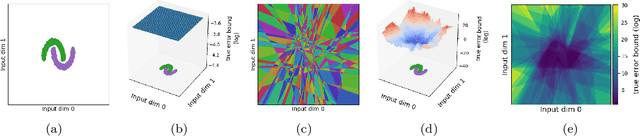
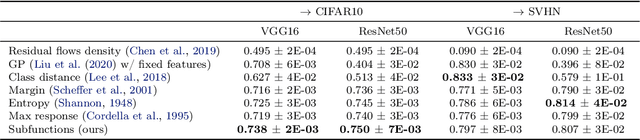
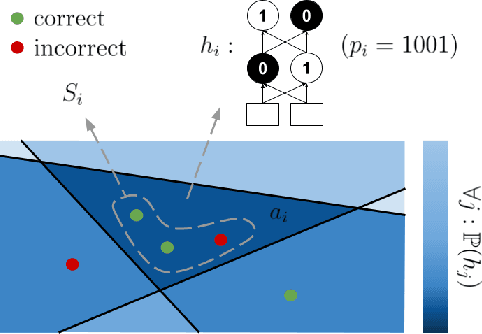

Piecewise linear neural networks can be split into subfunctions, each with its own activation pattern, domain, and empirical error. Empirical error for the full network can be written as an expectation over empirical error of subfunctions. Constructing a generalization bound on subfunction empirical error indicates that the more densely a subfunction is surrounded by training samples in representation space, the more reliable its predictions are. Further, it suggests that models with fewer activation regions generalize better, and models that abstract knowledge to a greater degree generalize better, all else equal. We propose not only a theoretical framework to reason about subfunction error bounds but also a pragmatic way of approximately evaluating it, which we apply to predicting which samples the network will not successfully generalize to. We test our method on detection of misclassification and out-of-distribution samples, finding that it performs competitively in both cases. In short, some network activation patterns are associated with higher reliability than others, and these can be identified using subfunction error bounds.
Pretraining Representations for Data-Efficient Reinforcement Learning
Jun 09, 2021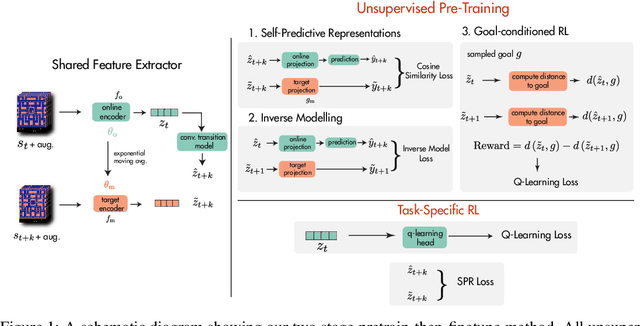
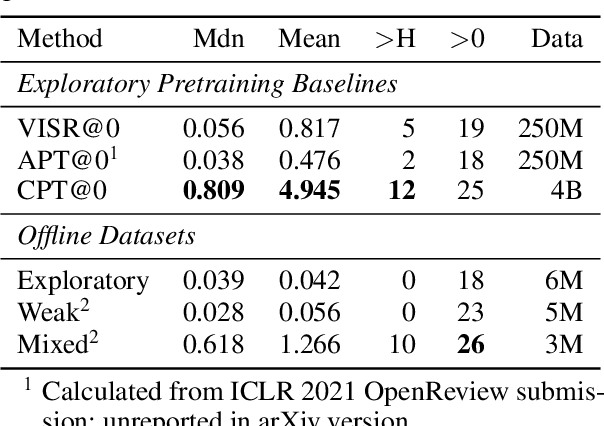
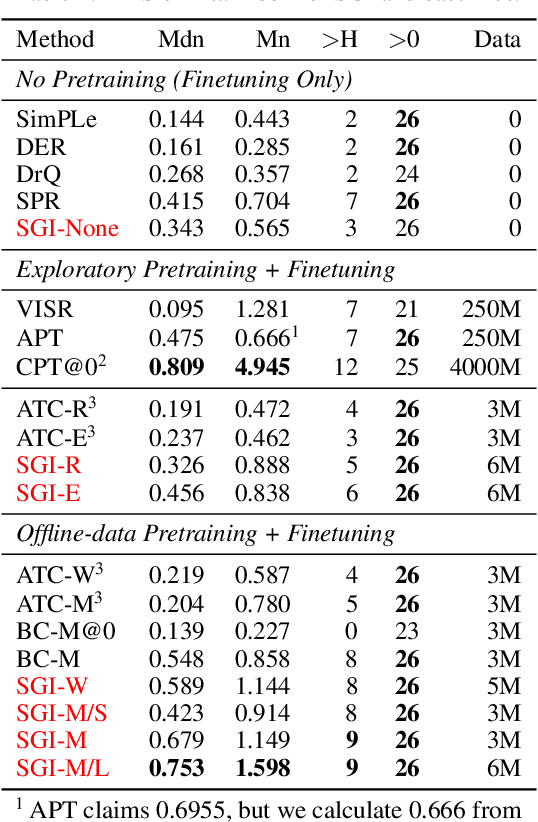
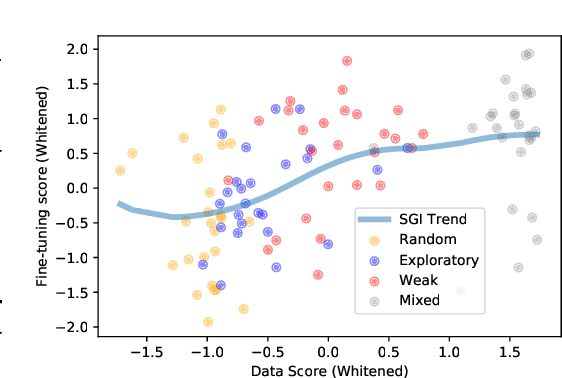
Data efficiency is a key challenge for deep reinforcement learning. We address this problem by using unlabeled data to pretrain an encoder which is then finetuned on a small amount of task-specific data. To encourage learning representations which capture diverse aspects of the underlying MDP, we employ a combination of latent dynamics modelling and unsupervised goal-conditioned RL. When limited to 100k steps of interaction on Atari games (equivalent to two hours of human experience), our approach significantly surpasses prior work combining offline representation pretraining with task-specific finetuning, and compares favourably with other pretraining methods that require orders of magnitude more data. Our approach shows particular promise when combined with larger models as well as more diverse, task-aligned observational data -- approaching human-level performance and data-efficiency on Atari in our best setting. We provide code associated with this work at https://github.com/mila-iqia/SGI.