 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRACE: A Language Model Framework for Explainable Inverse Reinforcement Learning
Oct 02, 2025Inverse Reinforcement Learning aims to recover reward models from expert demonstrations, but traditional methods yield "black-box" models that are difficult to interpret and debug. In this work, we introduce GRACE (Generating Rewards As CodE), a method for using Large Language Models within an evolutionary search to reverse-engineer an interpretable, code-based reward function directly from expert trajectories. The resulting reward function is executable code that can be inspected and verified. We empirically validate GRACE on the BabyAI and AndroidWorld benchmarks, where it efficiently learns highly accurate rewards, even in complex, multi-task settings. Further, we demonstrate that the resulting reward leads to strong policies, compared to both competitive Imitation Learning and online RL approaches with ground-truth rewards. Finally, we show that GRACE is able to build complex reward APIs in multi-task setups.
From Multimodal LLMs to Generalist Embodied Agents: Methods and Lessons
Dec 11, 2024We examine the capability of Multimodal Large Language Models (MLLMs) to tackle diverse domains that extend beyond the traditional language and vision tasks these models are typically trained on. Specifically, our focus lies in areas such as Embodied AI, Games, UI Control, and Planning. To this end, we introduce a process of adapting an MLLM to a Generalist Embodied Agent (GEA). GEA is a single unified model capable of grounding itself across these varied domains through a multi-embodiment action tokenizer. GEA is trained with supervised learning on a large dataset of embodied experiences and with online RL in interactive simulators. We explore the data and algorithmic choices necessary to develop such a model. Our findings reveal the importance of training with cross-domain data and online RL for building generalist agents. The final GEA model achieves strong generalization performance to unseen tasks across diverse benchmarks compared to other generalist models and benchmark-specific approaches.
On the Modeling Capabilities of Large Language Models for Sequential Decision Making
Oct 08, 2024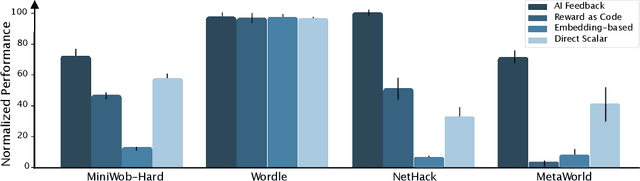
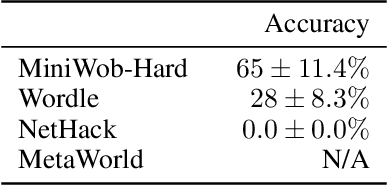
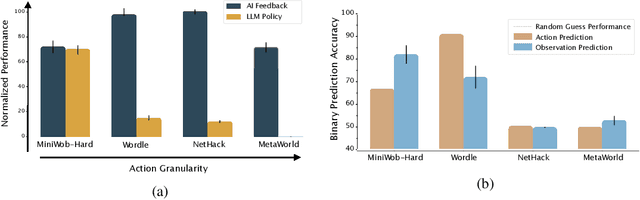
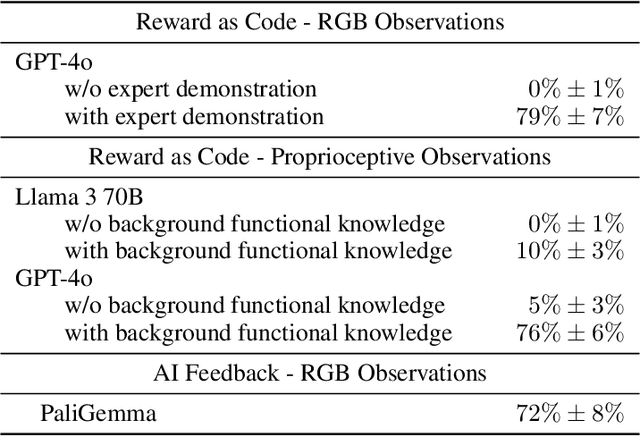
Large pretrained models are showing increasingly better performance in reasoning and planning tasks across different modalities, opening the possibility to leverage them for complex sequential decision making problems. In this paper, we investigate the capabilities of Large Language Models (LLMs) for reinforcement learning (RL) across a diversity of interactive domains. We evaluate their ability to produce decision-making policies, either directly, by generating actions, or indirectly, by first generating reward models to train an agent with RL. Our results show that, even without task-specific fine-tuning, LLMs excel at reward modeling. In particular, crafting rewards through artificial intelligence (AI) feedback yields the most generally applicable approach and can enhance performance by improving credit assignment and exploration. Finally, in environments with unfamiliar dynamics, we explore how fine-tuning LLMs with synthetic data can significantly improve their reward modeling capabilities while mitigating catastrophic forgetting, further broadening their utility in sequential decision-making tasks.
On the benefits of pixel-based hierarchical policies for task generalization
Jul 27, 2024



Reinforcement learning practitioners often avoid hierarchical policies, especially in image-based observation spaces. Typically, the single-task performance improvement over flat-policy counterparts does not justify the additional complexity associated with implementing a hierarchy. However, by introducing multiple decision-making levels, hierarchical policies can compose lower-level policies to more effectively generalize between tasks, highlighting the need for multi-task evaluations. We analyze the benefits of hierarchy through simulated multi-task robotic control experiments from pixels. Our results show that hierarchical policies trained with task conditioning can (1) increase performance on training tasks, (2) lead to improved reward and state-space generalizations in similar tasks, and (3) decrease the complexity of fine tuning required to solve novel tasks. Thus, we believe that hierarchical policies should be considered when building reinforcement learning architectures capable of generalizing between tasks.
Grounding Multimodal Large Language Models in Actions
Jun 12, 2024



Multimodal Large Language Models (MLLMs) have demonstrated a wide range of capabilities across many domains, including Embodied AI. In this work, we study how to best ground a MLLM into different embodiments and their associated action spaces, with the goal of leveraging the multimodal world knowledge of the MLLM. We first generalize a number of methods through a unified architecture and the lens of action space adaptors. For continuous actions, we show that a learned tokenization allows for sufficient modeling precision, yielding the best performance on downstream tasks. For discrete actions, we demonstrate that semantically aligning these actions with the native output token space of the MLLM leads to the strongest performance. We arrive at these lessons via a thorough study of seven action space adapters on five different environments, encompassing over 114 embodied tasks.
Large Language Models as Generalizable Policies for Embodied Tasks
Oct 26, 2023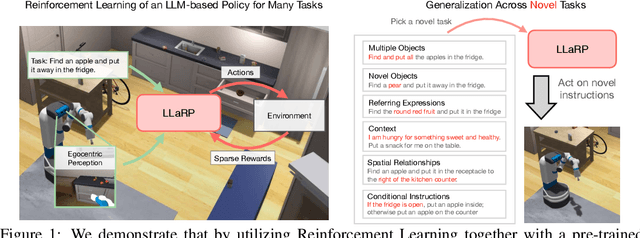
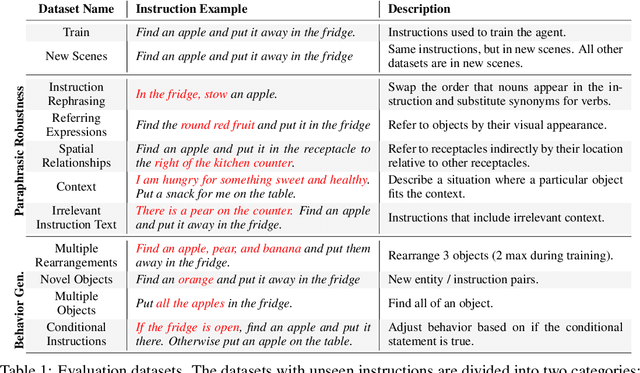
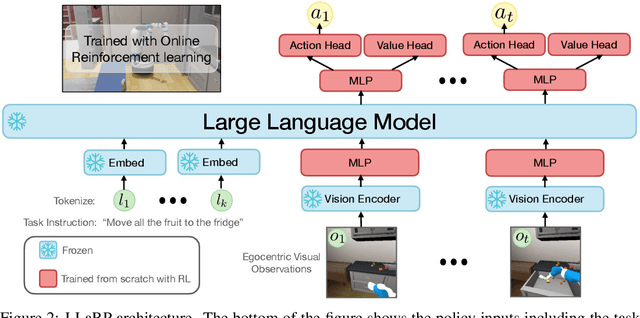
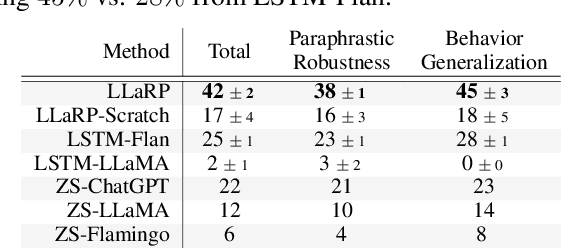
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
Value function estimation using conditional diffusion models for control
Jun 09, 2023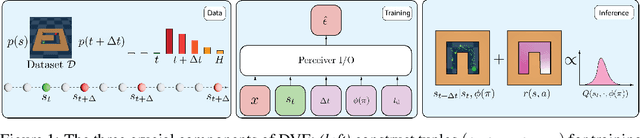
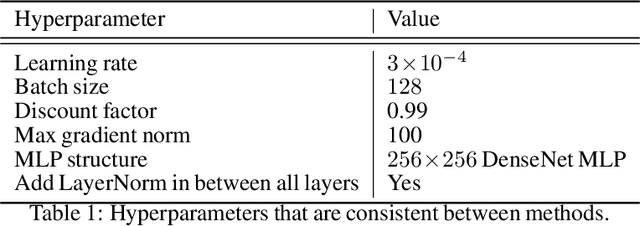
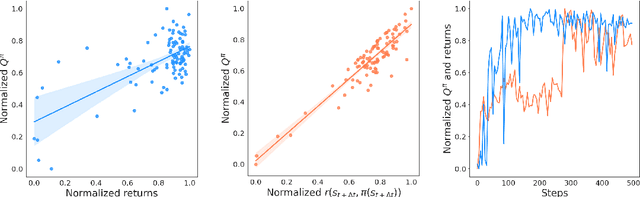
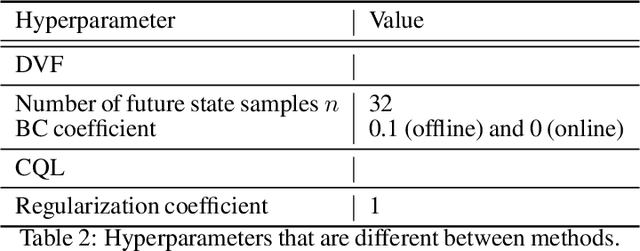
A fairly reliable trend in deep reinforcement learning is that the performance scales with the number of parameters, provided a complimentary scaling in amount of training data. As the appetite for large models increases, it is imperative to address, sooner than later, the potential problem of running out of high-quality demonstrations. In this case, instead of collecting only new data via costly human demonstrations or risking a simulation-to-real transfer with uncertain effects, it would be beneficial to leverage vast amounts of readily-available low-quality data. Since classical control algorithms such as behavior cloning or temporal difference learning cannot be used on reward-free or action-free data out-of-the-box, this solution warrants novel training paradigms for continuous control. We propose a simple algorithm called Diffused Value Function (DVF), which learns a joint multi-step model of the environment-robot interaction dynamics using a diffusion model. This model can be efficiently learned from state sequences (i.e., without access to reward functions nor actions), and subsequently used to estimate the value of each action out-of-the-box. We show how DVF can be used to efficiently capture the state visitation measure for multiple controllers, and show promising qualitative and quantitative results on challenging robotics benchmarks.
Accelerating exploration and representation learning with offline pre-training
Mar 31, 2023
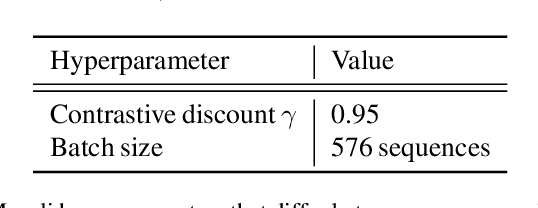
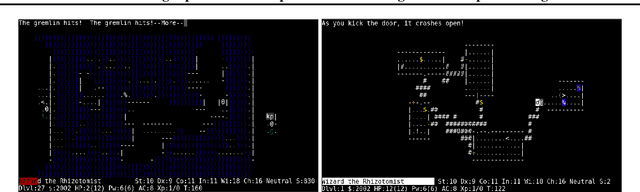
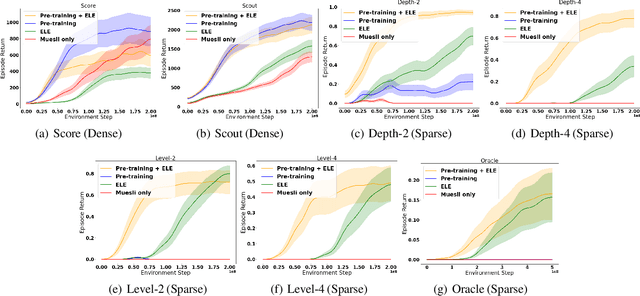
Sequential decision-making agents struggle with long horizon tasks, since solving them requires multi-step reasoning. Most reinforcement learning (RL) algorithms address this challenge by improved credit assignment, introducing memory capability, altering the agent's intrinsic motivation (i.e. exploration) or its worldview (i.e. knowledge representation). Many of these components could be learned from offline data. In this work, we follow the hypothesis that exploration and representation learning can be improved by separately learning two different models from a single offline dataset. We show that learning a state representation using noise-contrastive estimation and a model of auxiliary reward separately from a single collection of human demonstrations can significantly improve the sample efficiency on the challenging NetHack benchmark. We also ablate various components of our experimental setting and highlight crucial insights.
Contrastive Value Learning: Implicit Models for Simple Offline RL
Nov 03, 2022Model-based reinforcement learning (RL) methods are appealing in the offline setting because they allow an agent to reason about the consequences of actions without interacting with the environment. Prior methods learn a 1-step dynamics model, which predicts the next state given the current state and action. These models do not immediately tell the agent which actions to take, but must be integrated into a larger RL framework. Can we model the environment dynamics in a different way, such that the learned model does directly indicate the value of each action? In this paper, we propose Contrastive Value Learning (CVL), which learns an implicit, multi-step model of the environment dynamics. This model can be learned without access to reward functions, but nonetheless can be used to directly estimate the value of each action, without requiring any TD learning. Because this model represents the multi-step transitions implicitly, it avoids having to predict high-dimensional observations and thus scales to high-dimensional tasks. Our experiments demonstrate that CVL outperforms prior offline RL methods on complex continuous control benchmarks.
Sequential Density Estimation via NCWFAs Sequential Density Estimation via Nonlinear Continuous Weighted Finite Automata
Jun 08, 2022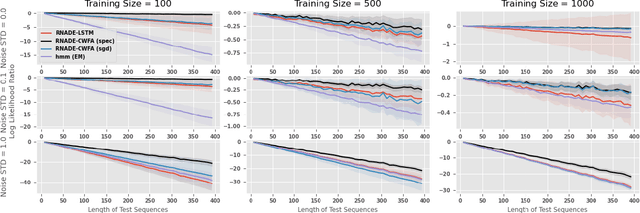
Weighted finite automata (WFAs) have been widely applied in many fields. One of the classic problems for WFAs is probability distribution estimation over sequences of discrete symbols. Although WFAs have been extended to deal with continuous input data, namely continuous WFAs (CWFAs), it is still unclear how to approximate density functions over sequences of continuous random variables using WFA-based models, due to the limitation on the expressiveness of the model as well as the tractability of approximating density functions via CWFAs. In this paper, we propose a nonlinear extension to the CWFA model to first improve its expressiveness, we refer to it as the nonlinear continuous WFAs (NCWFAs). Then we leverage the so-called RNADE method, which is a well-known density estimator based on neural networks, and propose the RNADE-NCWFA model. The RNADE-NCWFA model computes a density function by design. We show that this model is strictly more expressive than the Gaussian HMM model, which CWFA cannot approximate. Empirically, we conduct a synthetic experiment using Gaussian HMM generated data. We focus on evaluating the model's ability to estimate densities for sequences of varying lengths (longer length than the training data). We observe that our model performs the best among the compared baseline methods.