 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
MM1: Methods, Analysis & Insights from Multimodal LLM Pre-training
Mar 22, 2024



In this work, we discuss building performant Multimodal Large Language Models (MLLMs). In particular, we study the importance of various architecture components and data choices. Through careful and comprehensive ablations of the image encoder, the vision language connector, and various pre-training data choices, we identified several crucial design lessons. For example, we demonstrate that for large-scale multimodal pre-training using a careful mix of image-caption, interleaved image-text, and text-only data is crucial for achieving state-of-the-art (SOTA) few-shot results across multiple benchmarks, compared to other published pre-training results. Further, we show that the image encoder together with image resolution and the image token count has substantial impact, while the vision-language connector design is of comparatively negligible importance. By scaling up the presented recipe, we build MM1, a family of multimodal models up to 30B parameters, including both dense models and mixture-of-experts (MoE) variants, that are SOTA in pre-training metrics and achieve competitive performance after supervised fine-tuning on a range of established multimodal benchmarks. Thanks to large-scale pre-training, MM1 enjoys appealing properties such as enhanced in-context learning, and multi-image reasoning, enabling few-shot chain-of-thought prompting.
Learning and Controlling Silicon Dopant Transitions in Graphene using Scanning Transmission Electron Microscopy
Nov 21, 2023We introduce a machine learning approach to determine the transition dynamics of silicon atoms on a single layer of carbon atoms, when stimulated by the electron beam of a scanning transmission electron microscope (STEM). Our method is data-centric, leveraging data collected on a STEM. The data samples are processed and filtered to produce symbolic representations, which we use to train a neural network to predict transition probabilities. These learned transition dynamics are then leveraged to guide a single silicon atom throughout the lattice to pre-determined target destinations. We present empirical analyses that demonstrate the efficacy and generality of our approach.
Large Language Models as Generalizable Policies for Embodied Tasks
Oct 26, 2023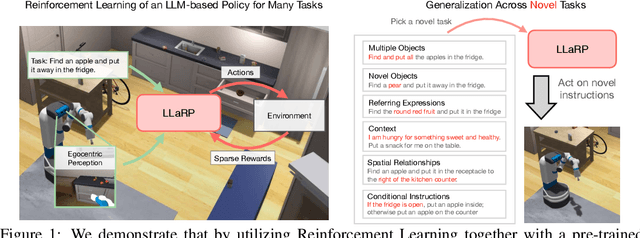
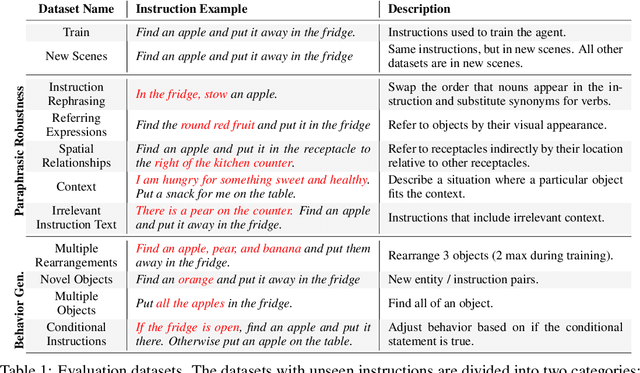
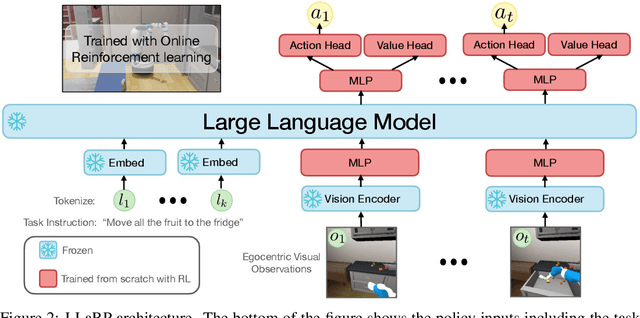
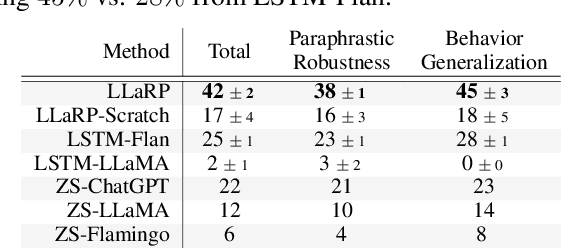
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
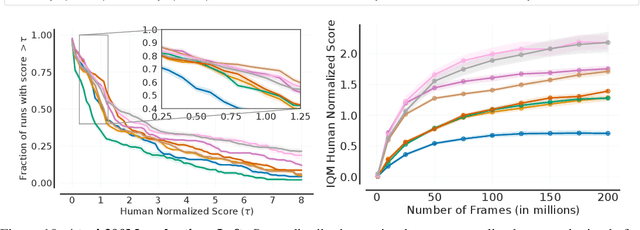
Bigger, Better, Faster: Human-level Atari with human-level efficiency
Jun 09, 2023



We introduce a value-based RL agent, which we call BBF, that achieves super-human performance in the Atari 100K benchmark. BBF relies on scaling the neural networks used for value estimation, as well as a number of other design choices that enable this scaling in a sample-efficient manner. We conduct extensive analyses of these design choices and provide insights for future work. We end with a discussion about updating the goalposts for sample-efficient RL research on the ALE. We make our code and data publicly available at https://github.com/google-research/google-research/tree/master/bigger_better_faster.
Beyond Tabula Rasa: Reincarnating Reinforcement Learning
Jun 03, 2022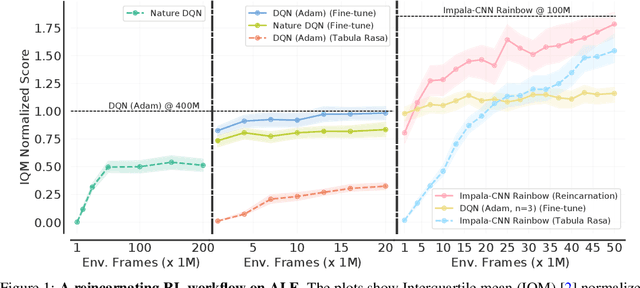

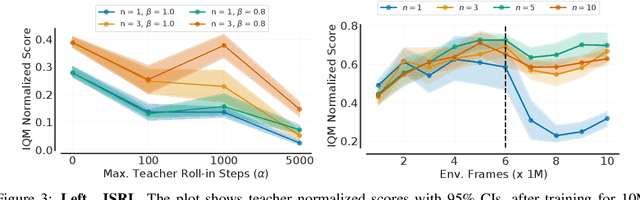
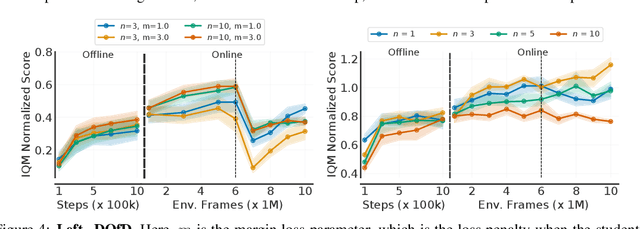
Learning tabula rasa, that is without any prior knowledge, is the prevalent workflow in reinforcement learning (RL) research. However, RL systems, when applied to large-scale settings, rarely operate tabula rasa. Such large-scale systems undergo multiple design or algorithmic changes during their development cycle and use ad hoc approaches for incorporating these changes without re-training from scratch, which would have been prohibitively expensive. Additionally, the inefficiency of deep RL typically excludes researchers without access to industrial-scale resources from tackling computationally-demanding problems. To address these issues, we present reincarnating RL as an alternative workflow, where prior computational work (e.g., learned policies) is reused or transferred between design iterations of an RL agent, or from one RL agent to another. As a step towards enabling reincarnating RL from any agent to any other agent, we focus on the specific setting of efficiently transferring an existing sub-optimal policy to a standalone value-based RL agent. We find that existing approaches fail in this setting and propose a simple algorithm to address their limitations. Equipped with this algorithm, we demonstrate reincarnating RL's gains over tabula rasa RL on Atari 2600 games, a challenging locomotion task, and the real-world problem of navigating stratospheric balloons. Overall, this work argues for an alternative approach to RL research, which we believe could significantly improve real-world RL adoption and help democratize it further.
The Primacy Bias in Deep Reinforcement Learning
May 16, 2022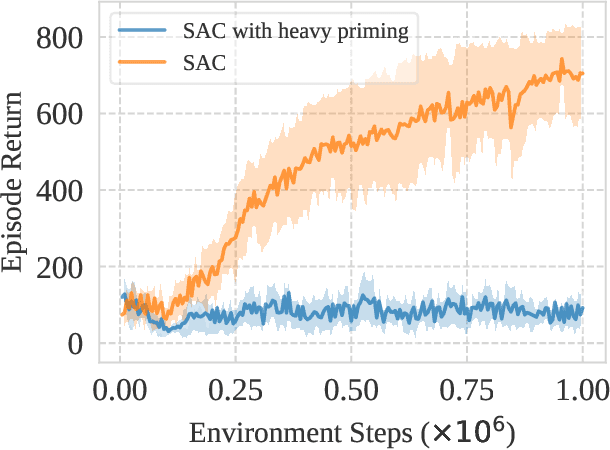
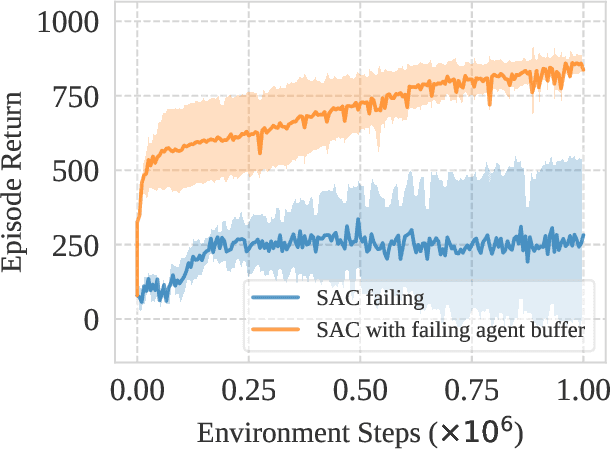
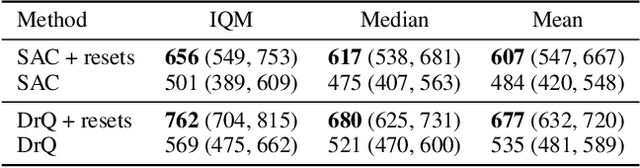

This work identifies a common flaw of deep reinforcement learning (RL) algorithms: a tendency to rely on early interactions and ignore useful evidence encountered later. Because of training on progressively growing datasets, deep RL agents incur a risk of overfitting to earlier experiences, negatively affecting the rest of the learning process. Inspired by cognitive science, we refer to this effect as the primacy bias. Through a series of experiments, we dissect the algorithmic aspects of deep RL that exacerbate this bias. We then propose a simple yet generally-applicable mechanism that tackles the primacy bias by periodically resetting a part of the agent. We apply this mechanism to algorithms in both discrete (Atari 100k) and continuous action (DeepMind Control Suite) domains, consistently improving their performance.
Simplicial Embeddings in Self-Supervised Learning and Downstream Classification
Apr 01, 2022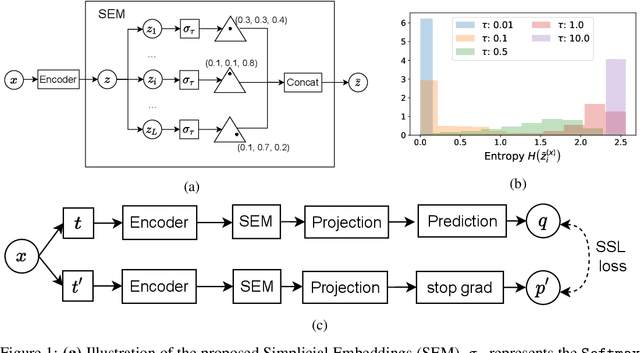

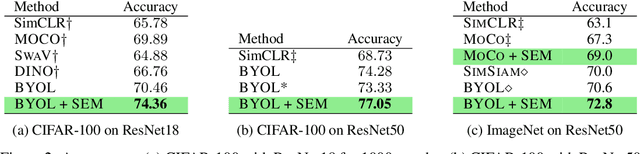
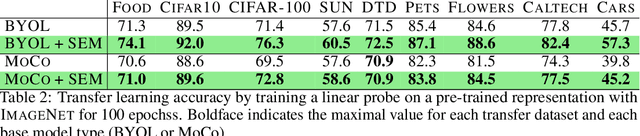
We introduce Simplicial Embeddings (SEMs) as a way to constrain the encoded representations of a self-supervised model to $L$ simplices of $V$ dimensions each using a Softmax operation. This procedure imposes a structure on the representations that reduce their expressivity for training downstream classifiers, which helps them generalize better. Specifically, we show that the temperature $\tau$ of the Softmax operation controls for the SEM representation's expressivity, allowing us to derive a tighter downstream classifier generalization bound than that for classifiers using unnormalized representations. We empirically demonstrate that SEMs considerably improve generalization on natural image datasets such as CIFAR-100 and ImageNet. Finally, we also present evidence of the emergence of semantically relevant features in SEMs, a pattern that is absent from baseline self-supervised models.
Deep Reinforcement Learning at the Edge of the Statistical Precipice
Aug 30, 2021

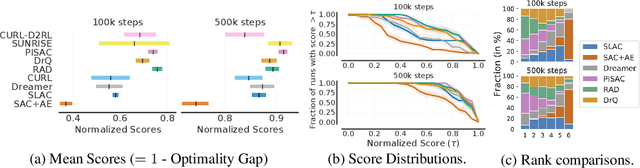
Deep reinforcement learning (RL) algorithms are predominantly evaluated by comparing their relative performance on a large suite of tasks. Most published results on deep RL benchmarks compare point estimates of aggregate performance such as mean and median scores across tasks, ignoring the statistical uncertainty implied by the use of a finite number of training runs. Beginning with the Arcade Learning Environment (ALE), the shift towards computationally-demanding benchmarks has led to the practice of evaluating only a small number of runs per task, exacerbating the statistical uncertainty in point estimates. In this paper, we argue that reliable evaluation in the few run deep RL regime cannot ignore the uncertainty in results without running the risk of slowing down progress in the field. We illustrate this point using a case study on the Atari 100k benchmark, where we find substantial discrepancies between conclusions drawn from point estimates alone versus a more thorough statistical analysis. With the aim of increasing the field's confidence in reported results with a handful of runs, we advocate for reporting interval estimates of aggregate performance and propose performance profiles to account for the variability in results, as well as present more robust and efficient aggregate metrics, such as interquartile mean scores, to achieve small uncertainty in results. Using such statistical tools, we scrutinize performance evaluations of existing algorithms on other widely used RL benchmarks including the ALE, Procgen, and the DeepMind Control Suite, again revealing discrepancies in prior comparisons. Our findings call for a change in how we evaluate performance in deep RL, for which we present a more rigorous evaluation methodology, accompanied with an open-source library rliable, to prevent unreliable results from stagnating the field.