 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Tabula Rasa: Reincarnating Reinforcement Learning
Paper and Code
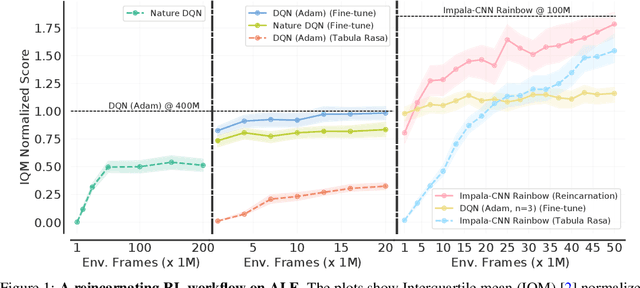

Learning tabula rasa, that is without any prior knowledge, is the prevalent workflow in reinforcement learning (RL) research. However, RL systems, when applied to large-scale settings, rarely operate tabula rasa. Such large-scale systems undergo multiple design or algorithmic changes during their development cycle and use ad hoc approaches for incorporating these changes without re-training from scratch, which would have been prohibitively expensive. Additionally, the inefficiency of deep RL typically excludes researchers without access to industrial-scale resources from tackling computationally-demanding problems. To address these issues, we present reincarnating RL as an alternative workflow, where prior computational work (e.g., learned policies) is reused or transferred between design iterations of an RL agent, or from one RL agent to another. As a step towards enabling reincarnating RL from any agent to any other agent, we focus on the specific setting of efficiently transferring an existing sub-optimal policy to a standalone value-based RL agent. We find that existing approaches fail in this setting and propose a simple algorithm to address their limitations. Equipped with this algorithm, we demonstrate reincarnating RL's gains over tabula rasa RL on Atari 2600 games, a challenging locomotion task, and the real-world problem of navigating stratospheric balloons. Overall, this work argues for an alternative approach to RL research, which we believe could significantly improve real-world RL adoption and help democratize it further.