 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise and Dexterous Robotic Manipulation via Human-in-the-Loop Reinforcement Learning
Oct 29, 2024Reinforcement learning (RL) holds great promise for enabling autonomous acquisition of complex robotic manipulation skills, but realizing this potential in real-world settings has been challenging. We present a human-in-the-loop vision-based RL system that demonstrates impressive performance on a diverse set of dexterous manipulation tasks, including dynamic manipulation, precision assembly, and dual-arm coordination. Our approach integrates demonstrations and human corrections, efficient RL algorithms, and other system-level design choices to learn policies that achieve near-perfect success rates and fast cycle times within just 1 to 2.5 hours of training. We show that our method significantly outperforms imitation learning baselines and prior RL approaches, with an average 2x improvement in success rate and 1.8x faster execution. Through extensive experiments and analysis, we provide insights into the effectiveness of our approach, demonstrating how it learns robust, adaptive policies for both reactive and predictive control strategies. Our results suggest that RL can indeed learn a wide range of complex vision-based manipulation policies directly in the real world within practical training times. We hope this work will inspire a new generation of learned robotic manipulation techniques, benefiting both industrial applications and research advancements. Videos and code are available at our project website https://hil-serl.github.io/.
Scaling and evaluating sparse autoencoders
Jun 06, 2024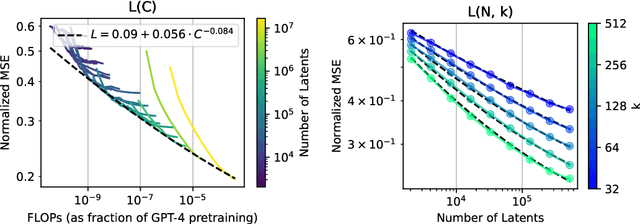
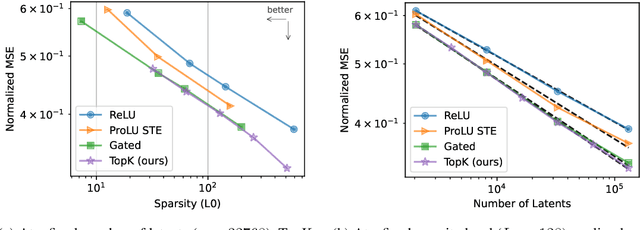
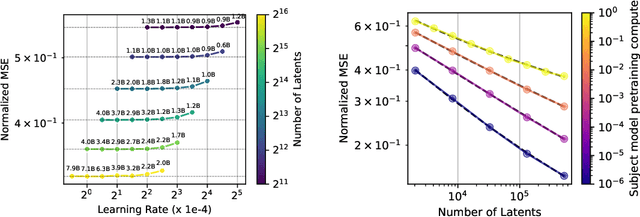
Sparse autoencoders provide a promising unsupervised approach for extracting interpretable features from a language model by reconstructing activations from a sparse bottleneck layer. Since language models learn many concepts, autoencoders need to be very large to recover all relevant features. However, studying the properties of autoencoder scaling is difficult due to the need to balance reconstruction and sparsity objectives and the presence of dead latents. We propose using k-sparse autoencoders [Makhzani and Frey, 2013] to directly control sparsity, simplifying tuning and improving the reconstruction-sparsity frontier. Additionally, we find modifications that result in few dead latents, even at the largest scales we tried. Using these techniques, we find clean scaling laws with respect to autoencoder size and sparsity. We also introduce several new metrics for evaluating feature quality based on the recovery of hypothesized features, the explainability of activation patterns, and the sparsity of downstream effects. These metrics all generally improve with autoencoder size. To demonstrate the scalability of our approach, we train a 16 million latent autoencoder on GPT-4 activations for 40 billion tokens. We release training code and autoencoders for open-source models, as well as a visualizer.
FMB: a Functional Manipulation Benchmark for Generalizable Robotic Learning
Jan 16, 2024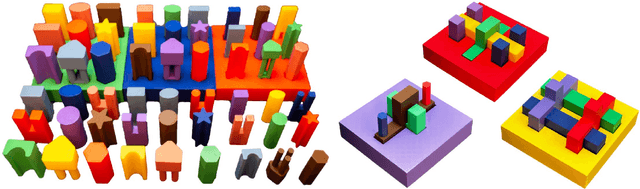


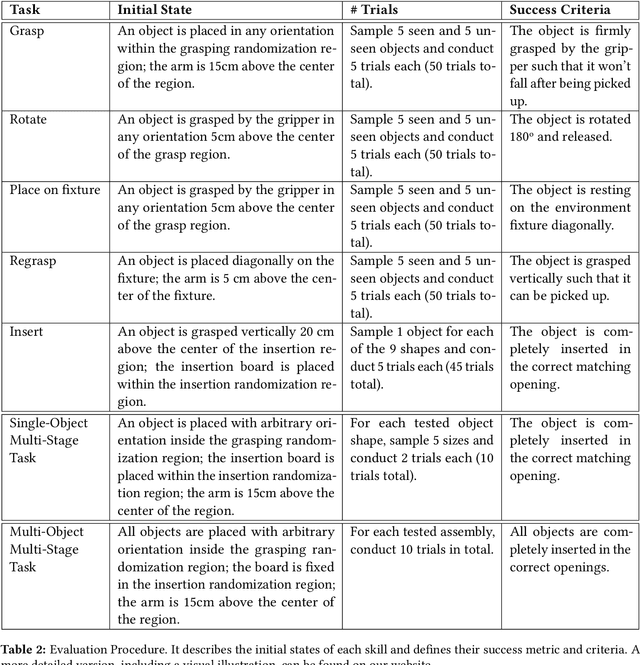
In this paper, we propose a real-world benchmark for studying robotic learning in the context of functional manipulation: a robot needs to accomplish complex long-horizon behaviors by composing individual manipulation skills in functionally relevant ways. The core design principles of our Functional Manipulation Benchmark (FMB) emphasize a harmonious balance between complexity and accessibility. Tasks are deliberately scoped to be narrow, ensuring that models and datasets of manageable scale can be utilized effectively to track progress. Simultaneously, they are diverse enough to pose a significant generalization challenge. Furthermore, the benchmark is designed to be easily replicable, encompassing all essential hardware and software components. To achieve this goal, FMB consists of a variety of 3D-printed objects designed for easy and accurate replication by other researchers. The objects are procedurally generated, providing a principled framework to study generalization in a controlled fashion. We focus on fundamental manipulation skills, including grasping, repositioning, and a range of assembly behaviors. The FMB can be used to evaluate methods for acquiring individual skills, as well as methods for combining and ordering such skills to solve complex, multi-stage manipulation tasks. We also offer an imitation learning framework that includes a suite of policies trained to solve the proposed tasks. This enables researchers to utilize our tasks as a versatile toolkit for examining various parts of the pipeline. For example, researchers could propose a better design for a grasping controller and evaluate it in combination with our baseline reorientation and assembly policies as part of a pipeline for solving multi-stage tasks. Our dataset, object CAD files, code, and evaluation videos can be found on our project website: https://functional-manipulation-benchmark.github.io
Action-Quantized Offline Reinforcement Learning for Robotic Skill Learning
Oct 18, 2023

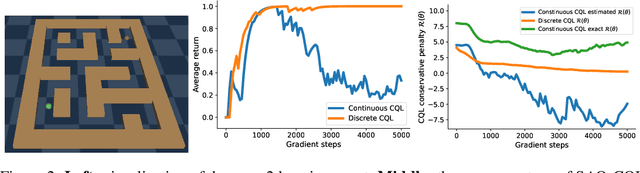
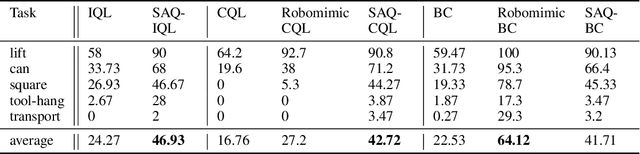
The offline reinforcement learning (RL) paradigm provides a general recipe to convert static behavior datasets into policies that can perform better than the policy that collected the data. While policy constraints, conservatism, and other methods for mitigating distributional shifts have made offline reinforcement learning more effective, the continuous action setting often necessitates various approximations for applying these techniques. Many of these challenges are greatly alleviated in discrete action settings, where offline RL constraints and regularizers can often be computed more precisely or even exactly. In this paper, we propose an adaptive scheme for action quantization. We use a VQ-VAE to learn state-conditioned action quantization, avoiding the exponential blowup that comes with na\"ive discretization of the action space. We show that several state-of-the-art offline RL methods such as IQL, CQL, and BRAC improve in performance on benchmarks when combined with our proposed discretization scheme. We further validate our approach on a set of challenging long-horizon complex robotic manipulation tasks in the Robomimic environment, where our discretized offline RL algorithms are able to improve upon their continuous counterparts by 2-3x. Our project page is at https://saqrl.github.io/
Language Models are Few-Shot Learners
Jun 05, 2020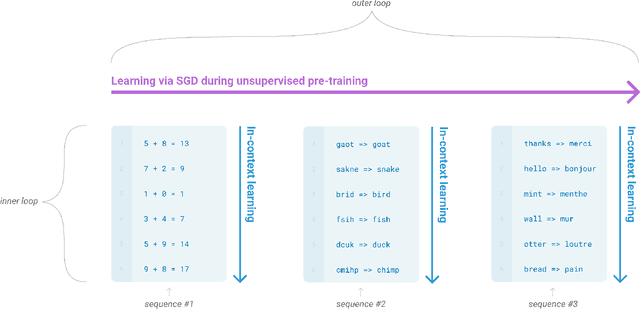
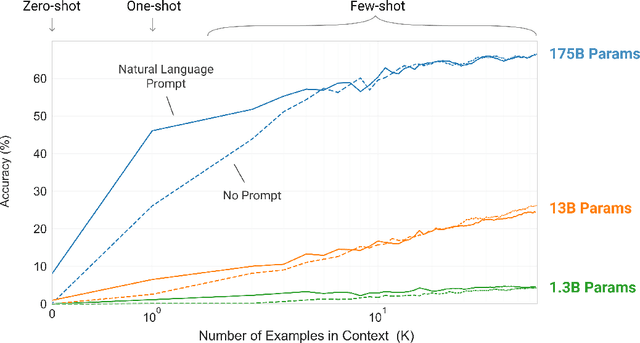
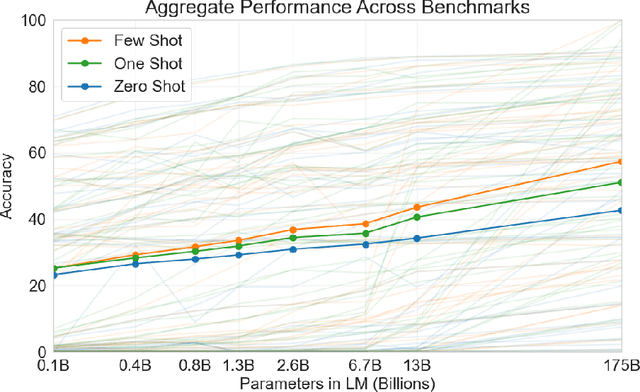
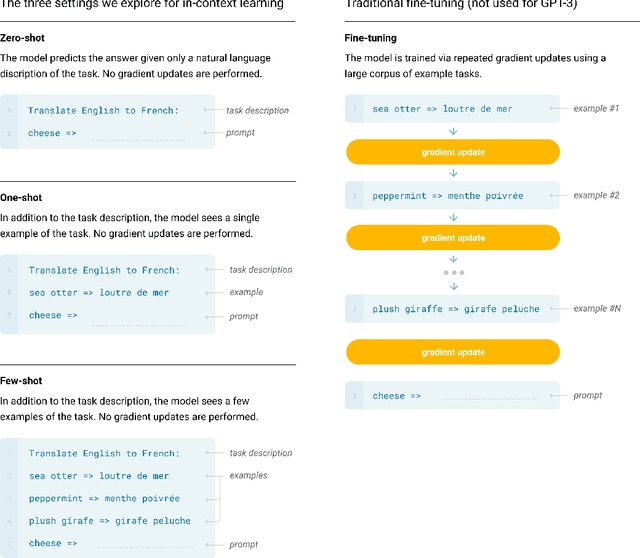
Recent work has demonstrated substantial gains on many NLP tasks and benchmarks by pre-training on a large corpus of text followed by fine-tuning on a specific task. While typically task-agnostic in architecture, this method still requires task-specific fine-tuning datasets of thousands or tens of thousands of examples. By contrast, humans can generally perform a new language task from only a few examples or from simple instructions - something which current NLP systems still largely struggle to do. Here we show that scaling up language models greatly improves task-agnostic, few-shot performance, sometimes even reaching competitiveness with prior state-of-the-art fine-tuning approaches. Specifically, we train GPT-3, an autoregressive language model with 175 billion parameters, 10x more than any previous non-sparse language model, and test its performance in the few-shot setting. For all tasks, GPT-3 is applied without any gradient updates or fine-tuning, with tasks and few-shot demonstrations specified purely via text interaction with the model. GPT-3 achieves strong performance on many NLP datasets, including translation, question-answering, and cloze tasks, as well as several tasks that require on-the-fly reasoning or domain adaptation, such as unscrambling words, using a novel word in a sentence, or performing 3-digit arithmetic. At the same time, we also identify some datasets where GPT-3's few-shot learning still struggles, as well as some datasets where GPT-3 faces methodological issues related to training on large web corpora. Finally, we find that GPT-3 can generate samples of news articles which human evaluators have difficulty distinguishing from articles written by humans. We discuss broader societal impacts of this finding and of GPT-3 in general.
Scaling Laws for Neural Language Models
Jan 23, 2020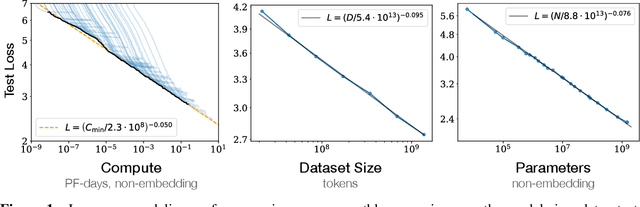
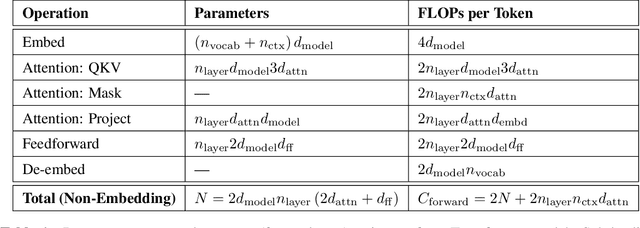
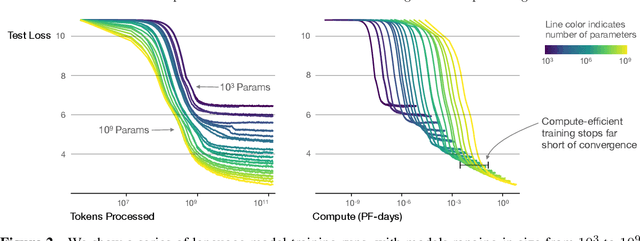
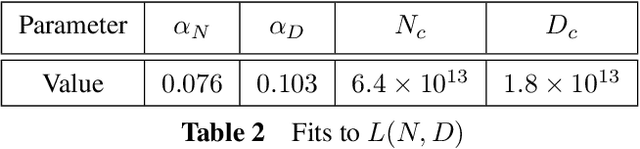
We study empirical scaling laws for language model performance on the cross-entropy loss. The loss scales as a power-law with model size, dataset size, and the amount of compute used for training, with some trends spanning more than seven orders of magnitude. Other architectural details such as network width or depth have minimal effects within a wide range. Simple equations govern the dependence of overfitting on model/dataset size and the dependence of training speed on model size. These relationships allow us to determine the optimal allocation of a fixed compute budget. Larger models are significantly more sample-efficient, such that optimally compute-efficient training involves training very large models on a relatively modest amount of data and stopping significantly before convergence.
Fine-Tuning Language Models from Human Preferences
Sep 18, 2019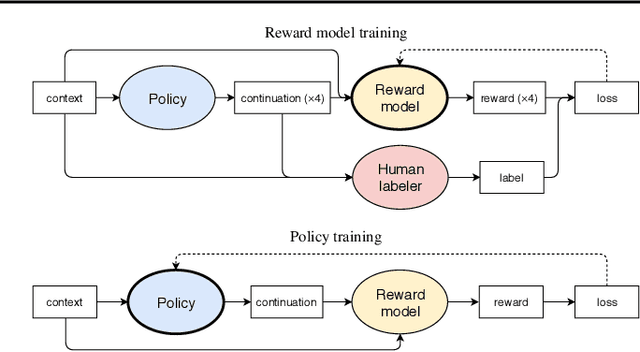
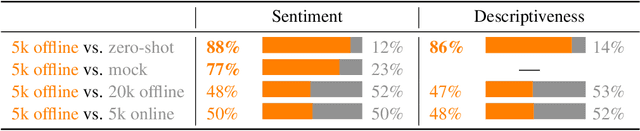
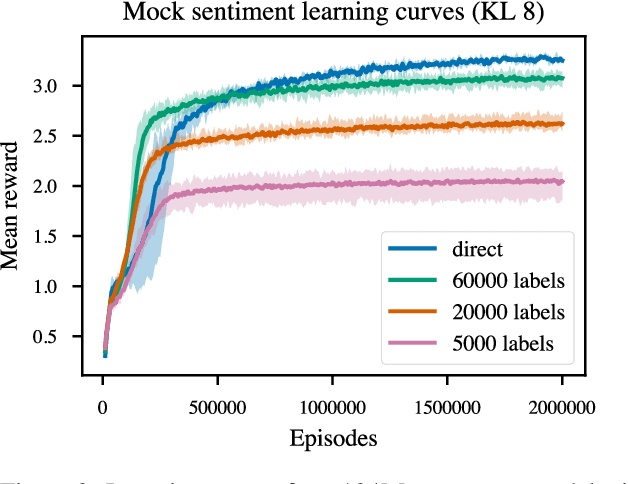
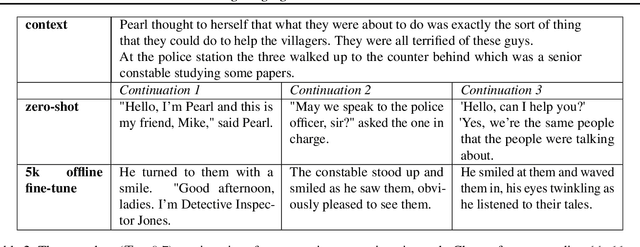
Reward learning enables the application of reinforcement learning (RL) to tasks where reward is defined by human judgment, building a model of reward by asking humans questions. Most work on reward learning has used simulated environments, but complex information about values is often expressed in natural language, and we believe reward learning for language is a key to making RL practical and safe for real-world tasks. In this paper, we build on advances in generative pretraining of language models to apply reward learning to four natural language tasks: continuing text with positive sentiment or physically descriptive language, and summarization tasks on the TL;DR and CNN/Daily Mail datasets. For stylistic continuation we achieve good results with only 5,000 comparisons evaluated by humans. For summarization, models trained with 60,000 comparisons copy whole sentences from the input but skip irrelevant preamble; this leads to reasonable ROUGE scores and very good performance according to our human labelers, but may be exploiting the fact that labelers rely on simple heuristics.