 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Tuning Large Vision-Language Models as Decision-Making Agents via Reinforcement Learning
May 17, 2024



Large vision-language models (VLMs) fine-tuned on specialized visual instruction-following data have exhibited impressive language reasoning capabilities across various scenarios. However, this fine-tuning paradigm may not be able to efficiently learn optimal decision-making agents in multi-step goal-directed tasks from interactive environments. To address this challenge, we propose an algorithmic framework that fine-tunes VLMs with reinforcement learning (RL). Specifically, our framework provides a task description and then prompts the VLM to generate chain-of-thought (CoT) reasoning, enabling the VLM to efficiently explore intermediate reasoning steps that lead to the final text-based action. Next, the open-ended text output is parsed into an executable action to interact with the environment to obtain goal-directed task rewards. Finally, our framework uses these task rewards to fine-tune the entire VLM with RL. Empirically, we demonstrate that our proposed framework enhances the decision-making capabilities of VLM agents across various tasks, enabling 7b models to outperform commercial models such as GPT4-V or Gemini. Furthermore, we find that CoT reasoning is a crucial component for performance improvement, as removing the CoT reasoning results in a significant decrease in the overall performance of our method.
FMB: a Functional Manipulation Benchmark for Generalizable Robotic Learning
Jan 16, 2024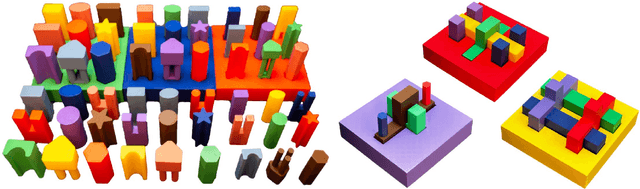


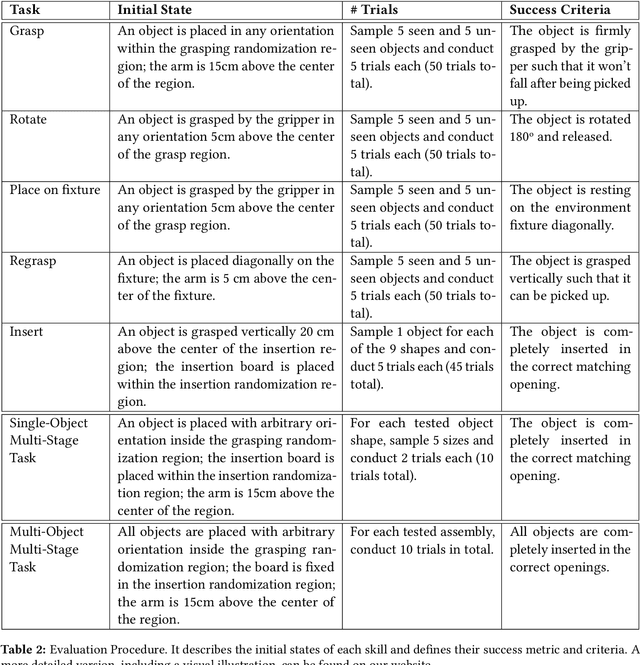
In this paper, we propose a real-world benchmark for studying robotic learning in the context of functional manipulation: a robot needs to accomplish complex long-horizon behaviors by composing individual manipulation skills in functionally relevant ways. The core design principles of our Functional Manipulation Benchmark (FMB) emphasize a harmonious balance between complexity and accessibility. Tasks are deliberately scoped to be narrow, ensuring that models and datasets of manageable scale can be utilized effectively to track progress. Simultaneously, they are diverse enough to pose a significant generalization challenge. Furthermore, the benchmark is designed to be easily replicable, encompassing all essential hardware and software components. To achieve this goal, FMB consists of a variety of 3D-printed objects designed for easy and accurate replication by other researchers. The objects are procedurally generated, providing a principled framework to study generalization in a controlled fashion. We focus on fundamental manipulation skills, including grasping, repositioning, and a range of assembly behaviors. The FMB can be used to evaluate methods for acquiring individual skills, as well as methods for combining and ordering such skills to solve complex, multi-stage manipulation tasks. We also offer an imitation learning framework that includes a suite of policies trained to solve the proposed tasks. This enables researchers to utilize our tasks as a versatile toolkit for examining various parts of the pipeline. For example, researchers could propose a better design for a grasping controller and evaluate it in combination with our baseline reorientation and assembly policies as part of a pipeline for solving multi-stage tasks. Our dataset, object CAD files, code, and evaluation videos can be found on our project website: https://functional-manipulation-benchmark.github.io
IC classifier: a classifier for 3D industrial components based on geometric prior using GNN
Mar 10, 2023
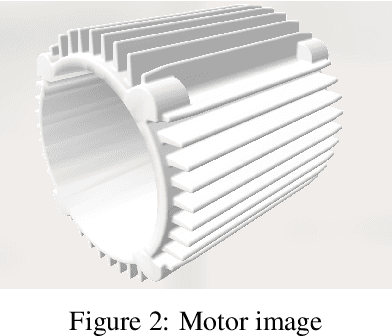
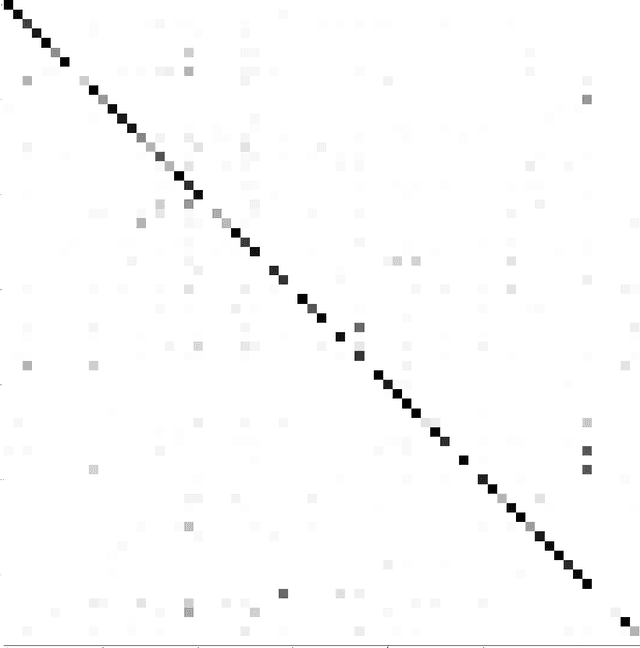

In this paper, we propose an approach to address the problem of classifying 3D industrial components by introducing a novel framework named IC-classifier (Industrial Component classifier). Our framework is designed to focus on the object's local and global structures, emphasizing the former by incorporating specific local features for embedding the model. By utilizing graphical neural networks and embedding derived from geometric properties, IC-classifier facilitates the exploration of the local structures of the object while using geometric attention for the analysis of global structures. Furthermore, the framework uses point clouds to circumvent the heavy computation workload. The proposed framework's performance is benchmarked against state-of-the-art models, demonstrating its potential to compete in the field.