 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFMB: a Functional Manipulation Benchmark for Generalizable Robotic Learning
Jan 16, 2024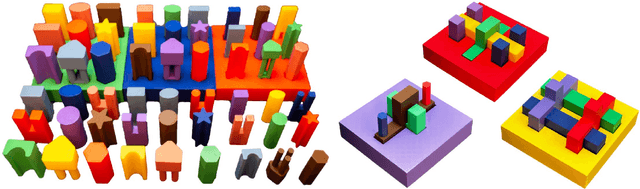


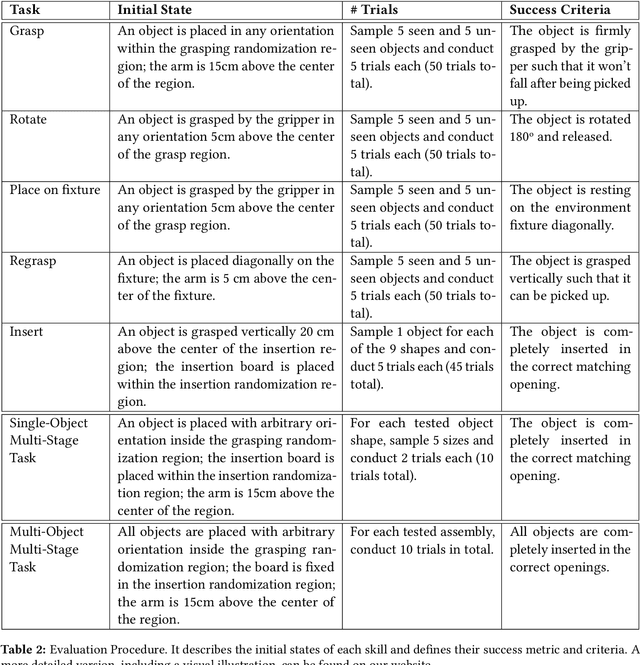
In this paper, we propose a real-world benchmark for studying robotic learning in the context of functional manipulation: a robot needs to accomplish complex long-horizon behaviors by composing individual manipulation skills in functionally relevant ways. The core design principles of our Functional Manipulation Benchmark (FMB) emphasize a harmonious balance between complexity and accessibility. Tasks are deliberately scoped to be narrow, ensuring that models and datasets of manageable scale can be utilized effectively to track progress. Simultaneously, they are diverse enough to pose a significant generalization challenge. Furthermore, the benchmark is designed to be easily replicable, encompassing all essential hardware and software components. To achieve this goal, FMB consists of a variety of 3D-printed objects designed for easy and accurate replication by other researchers. The objects are procedurally generated, providing a principled framework to study generalization in a controlled fashion. We focus on fundamental manipulation skills, including grasping, repositioning, and a range of assembly behaviors. The FMB can be used to evaluate methods for acquiring individual skills, as well as methods for combining and ordering such skills to solve complex, multi-stage manipulation tasks. We also offer an imitation learning framework that includes a suite of policies trained to solve the proposed tasks. This enables researchers to utilize our tasks as a versatile toolkit for examining various parts of the pipeline. For example, researchers could propose a better design for a grasping controller and evaluate it in combination with our baseline reorientation and assembly policies as part of a pipeline for solving multi-stage tasks. Our dataset, object CAD files, code, and evaluation videos can be found on our project website: https://functional-manipulation-benchmark.github.io
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Multi-Stage Cable Routing through Hierarchical Imitation Learning
Jul 23, 2023



We study the problem of learning to perform multi-stage robotic manipulation tasks, with applications to cable routing, where the robot must route a cable through a series of clips. This setting presents challenges representative of complex multi-stage robotic manipulation scenarios: handling deformable objects, closing the loop on visual perception, and handling extended behaviors consisting of multiple steps that must be executed successfully to complete the entire task. In such settings, learning individual primitives for each stage that succeed with a high enough rate to perform a complete temporally extended task is impractical: if each stage must be completed successfully and has a non-negligible probability of failure, the likelihood of successful completion of the entire task becomes negligible. Therefore, successful controllers for such multi-stage tasks must be able to recover from failure and compensate for imperfections in low-level controllers by smartly choosing which controllers to trigger at any given time, retrying, or taking corrective action as needed. To this end, we describe an imitation learning system that uses vision-based policies trained from demonstrations at both the lower (motor control) and the upper (sequencing) level, present a system for instantiating this method to learn the cable routing task, and perform evaluations showing great performance in generalizing to very challenging clip placement variations. Supplementary videos, datasets, and code can be found at https://sites.google.com/view/cablerouting.