 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Stage Cable Routing through Hierarchical Imitation Learning
Jul 23, 2023



We study the problem of learning to perform multi-stage robotic manipulation tasks, with applications to cable routing, where the robot must route a cable through a series of clips. This setting presents challenges representative of complex multi-stage robotic manipulation scenarios: handling deformable objects, closing the loop on visual perception, and handling extended behaviors consisting of multiple steps that must be executed successfully to complete the entire task. In such settings, learning individual primitives for each stage that succeed with a high enough rate to perform a complete temporally extended task is impractical: if each stage must be completed successfully and has a non-negligible probability of failure, the likelihood of successful completion of the entire task becomes negligible. Therefore, successful controllers for such multi-stage tasks must be able to recover from failure and compensate for imperfections in low-level controllers by smartly choosing which controllers to trigger at any given time, retrying, or taking corrective action as needed. To this end, we describe an imitation learning system that uses vision-based policies trained from demonstrations at both the lower (motor control) and the upper (sequencing) level, present a system for instantiating this method to learn the cable routing task, and perform evaluations showing great performance in generalizing to very challenging clip placement variations. Supplementary videos, datasets, and code can be found at https://sites.google.com/view/cablerouting.
GenLoco: Generalized Locomotion Controllers for Quadrupedal Robots
Sep 12, 2022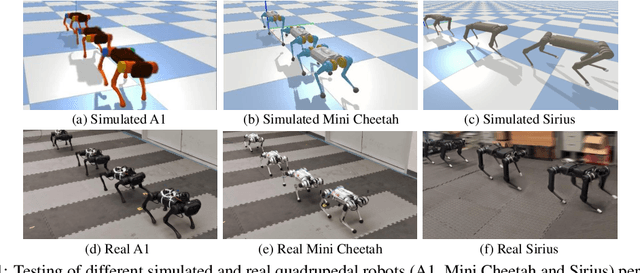
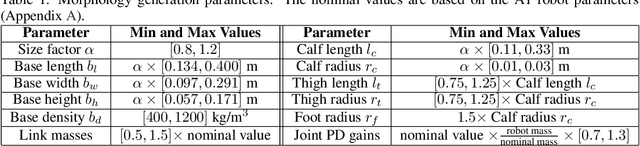
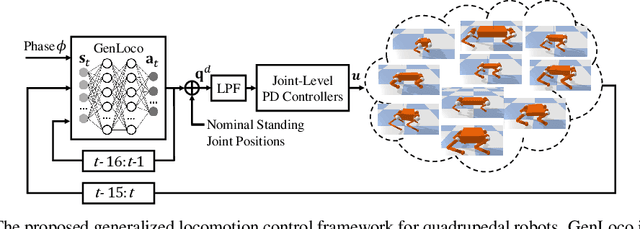

Recent years have seen a surge in commercially-available and affordable quadrupedal robots, with many of these platforms being actively used in research and industry. As the availability of legged robots grows, so does the need for controllers that enable these robots to perform useful skills. However, most learning-based frameworks for controller development focus on training robot-specific controllers, a process that needs to be repeated for every new robot. In this work, we introduce a framework for training generalized locomotion (GenLoco) controllers for quadrupedal robots. Our framework synthesizes general-purpose locomotion controllers that can be deployed on a large variety of quadrupedal robots with similar morphologies. We present a simple but effective morphology randomization method that procedurally generates a diverse set of simulated robots for training. We show that by training a controller on this large set of simulated robots, our models acquire more general control strategies that can be directly transferred to novel simulated and real-world robots with diverse morphologies, which were not observed during training.