 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Laws for Autoregressive Generative Modeling
Nov 06, 2020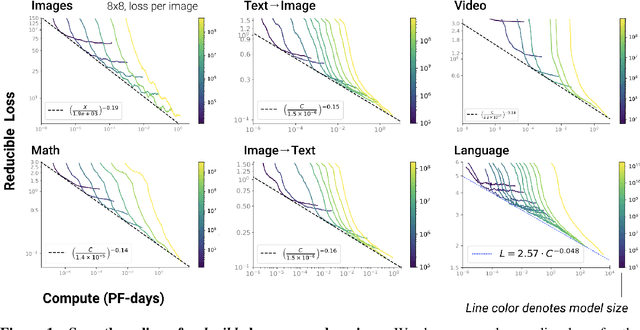
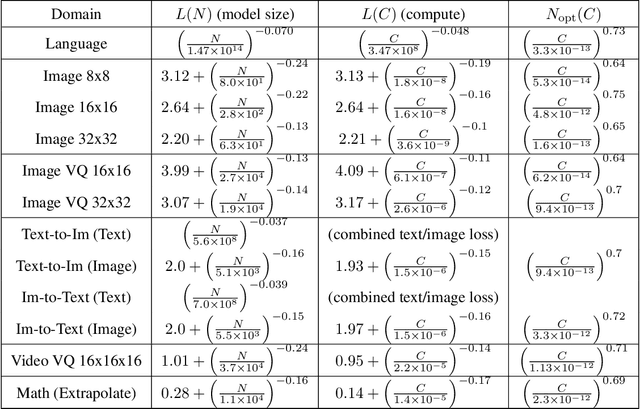
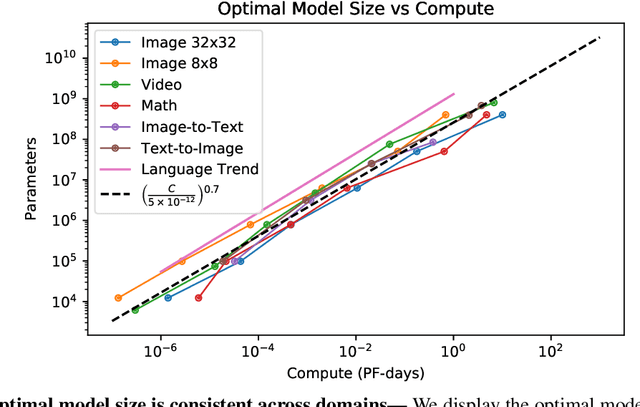

We identify empirical scaling laws for the cross-entropy loss in four domains: generative image modeling, video modeling, multimodal image$\leftrightarrow$text models, and mathematical problem solving. In all cases autoregressive Transformers smoothly improve in performance as model size and compute budgets increase, following a power-law plus constant scaling law. The optimal model size also depends on the compute budget through a power-law, with exponents that are nearly universal across all data domains. The cross-entropy loss has an information theoretic interpretation as $S($True$) + D_{\mathrm{KL}}($True$||$Model$)$, and the empirical scaling laws suggest a prediction for both the true data distribution's entropy and the KL divergence between the true and model distributions. With this interpretation, billion-parameter Transformers are nearly perfect models of the YFCC100M image distribution downsampled to an $8\times 8$ resolution, and we can forecast the model size needed to achieve any given reducible loss (ie $D_{\mathrm{KL}}$) in nats/image for other resolutions. We find a number of additional scaling laws in specific domains: (a) we identify a scaling relation for the mutual information between captions and images in multimodal models, and show how to answer the question "Is a picture worth a thousand words?"; (b) in the case of mathematical problem solving, we identify scaling laws for model performance when extrapolating beyond the training distribution; (c) we finetune generative image models for ImageNet classification and find smooth scaling of the classification loss and error rate, even as the generative loss levels off. Taken together, these results strengthen the case that scaling laws have important implications for neural network performance, including on downstream tasks.
Language Models are Few-Shot Learners
Jun 05, 2020
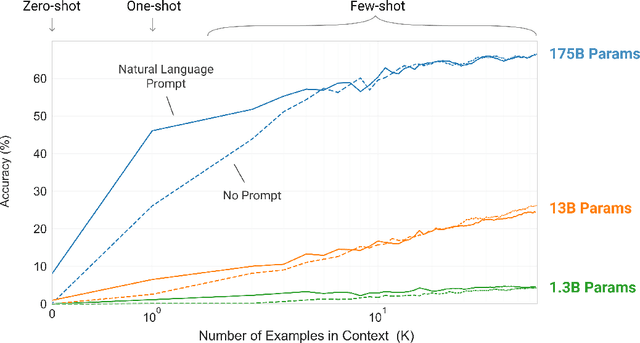
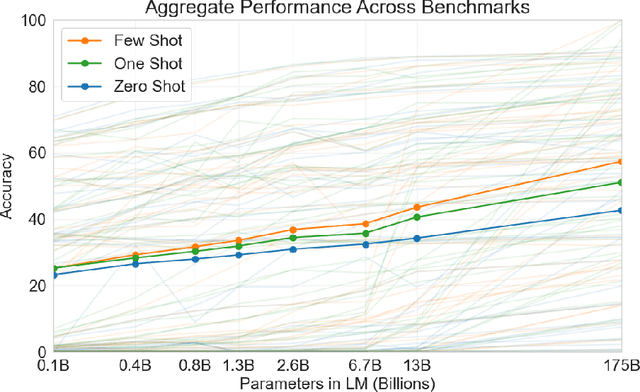
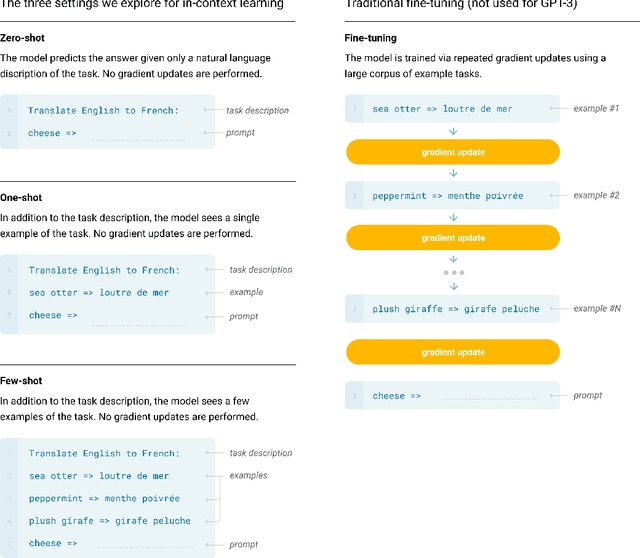
Recent work has demonstrated substantial gains on many NLP tasks and benchmarks by pre-training on a large corpus of text followed by fine-tuning on a specific task. While typically task-agnostic in architecture, this method still requires task-specific fine-tuning datasets of thousands or tens of thousands of examples. By contrast, humans can generally perform a new language task from only a few examples or from simple instructions - something which current NLP systems still largely struggle to do. Here we show that scaling up language models greatly improves task-agnostic, few-shot performance, sometimes even reaching competitiveness with prior state-of-the-art fine-tuning approaches. Specifically, we train GPT-3, an autoregressive language model with 175 billion parameters, 10x more than any previous non-sparse language model, and test its performance in the few-shot setting. For all tasks, GPT-3 is applied without any gradient updates or fine-tuning, with tasks and few-shot demonstrations specified purely via text interaction with the model. GPT-3 achieves strong performance on many NLP datasets, including translation, question-answering, and cloze tasks, as well as several tasks that require on-the-fly reasoning or domain adaptation, such as unscrambling words, using a novel word in a sentence, or performing 3-digit arithmetic. At the same time, we also identify some datasets where GPT-3's few-shot learning still struggles, as well as some datasets where GPT-3 faces methodological issues related to training on large web corpora. Finally, we find that GPT-3 can generate samples of news articles which human evaluators have difficulty distinguishing from articles written by humans. We discuss broader societal impacts of this finding and of GPT-3 in general.
Measuring the Algorithmic Efficiency of Neural Networks
May 08, 2020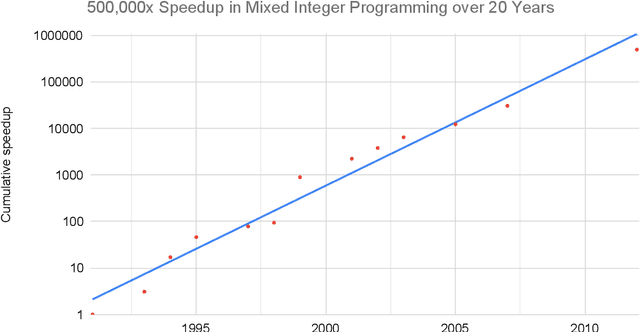
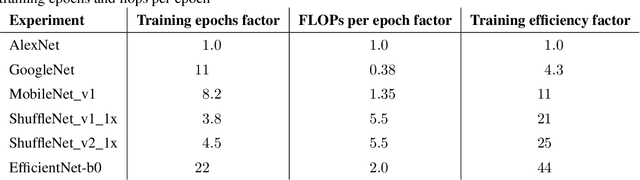
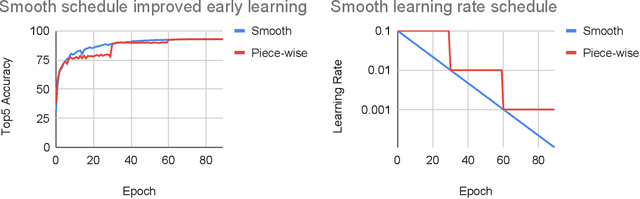
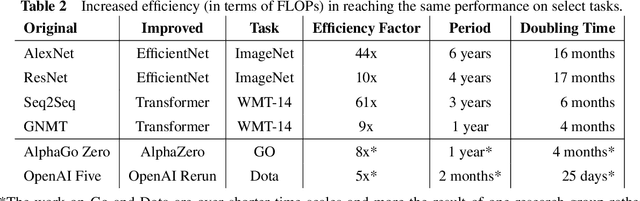
Three factors drive the advance of AI: algorithmic innovation, data, and the amount of compute available for training. Algorithmic progress has traditionally been more difficult to quantify than compute and data. In this work, we argue that algorithmic progress has an aspect that is both straightforward to measure and interesting: reductions over time in the compute needed to reach past capabilities. We show that the number of floating-point operations required to train a classifier to AlexNet-level performance on ImageNet has decreased by a factor of 44x between 2012 and 2019. This corresponds to algorithmic efficiency doubling every 16 months over a period of 7 years. By contrast, Moore's Law would only have yielded an 11x cost improvement. We observe that hardware and algorithmic efficiency gains multiply and can be on a similar scale over meaningful horizons, which suggests that a good model of AI progress should integrate measures from both.
Scaling Laws for Neural Language Models
Jan 23, 2020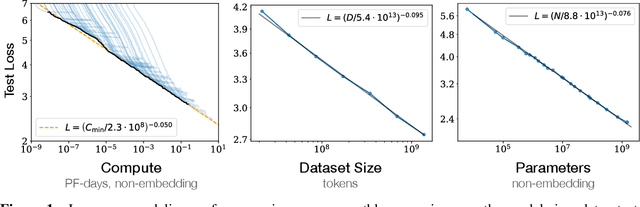
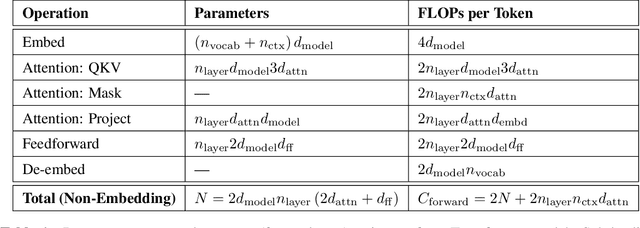
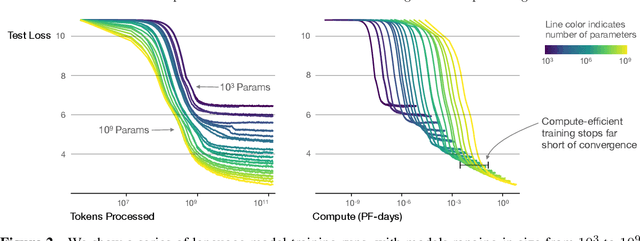
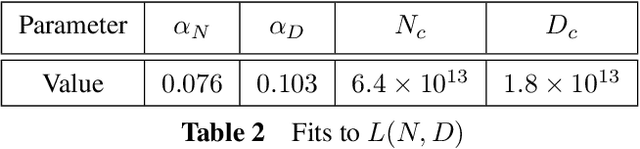
We study empirical scaling laws for language model performance on the cross-entropy loss. The loss scales as a power-law with model size, dataset size, and the amount of compute used for training, with some trends spanning more than seven orders of magnitude. Other architectural details such as network width or depth have minimal effects within a wide range. Simple equations govern the dependence of overfitting on model/dataset size and the dependence of training speed on model size. These relationships allow us to determine the optimal allocation of a fixed compute budget. Larger models are significantly more sample-efficient, such that optimally compute-efficient training involves training very large models on a relatively modest amount of data and stopping significantly before convergence.
Fine-Tuning Language Models from Human Preferences
Sep 18, 2019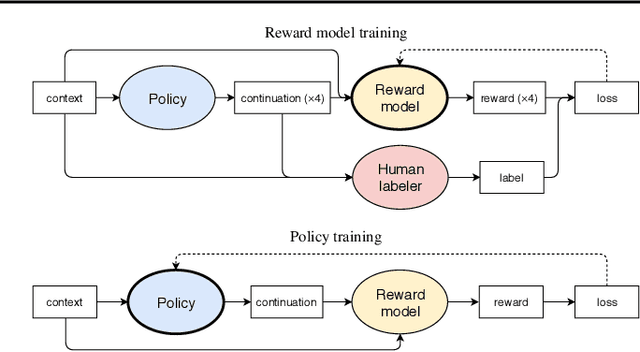
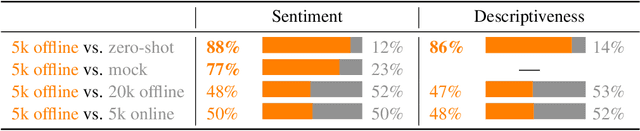
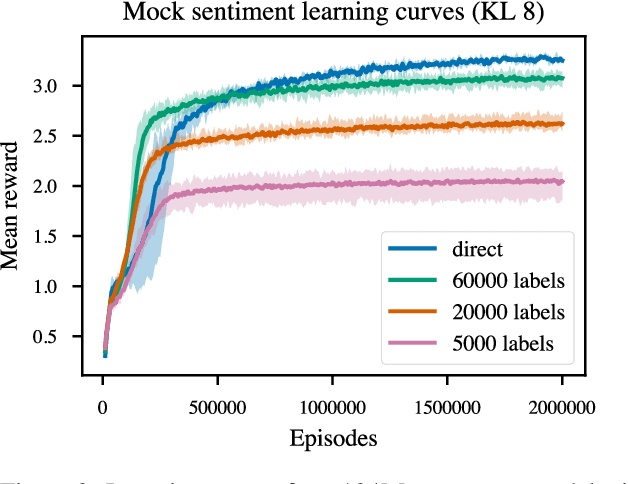
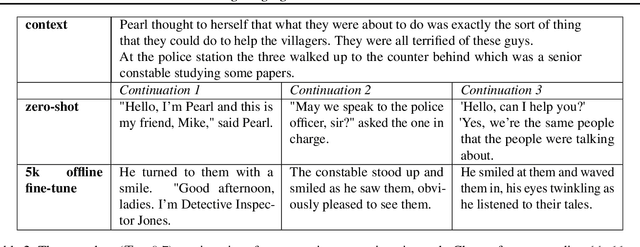
Reward learning enables the application of reinforcement learning (RL) to tasks where reward is defined by human judgment, building a model of reward by asking humans questions. Most work on reward learning has used simulated environments, but complex information about values is often expressed in natural language, and we believe reward learning for language is a key to making RL practical and safe for real-world tasks. In this paper, we build on advances in generative pretraining of language models to apply reward learning to four natural language tasks: continuing text with positive sentiment or physically descriptive language, and summarization tasks on the TL;DR and CNN/Daily Mail datasets. For stylistic continuation we achieve good results with only 5,000 comparisons evaluated by humans. For summarization, models trained with 60,000 comparisons copy whole sentences from the input but skip irrelevant preamble; this leads to reasonable ROUGE scores and very good performance according to our human labelers, but may be exploiting the fact that labelers rely on simple heuristics.
Unrestricted Adversarial Examples
Sep 22, 2018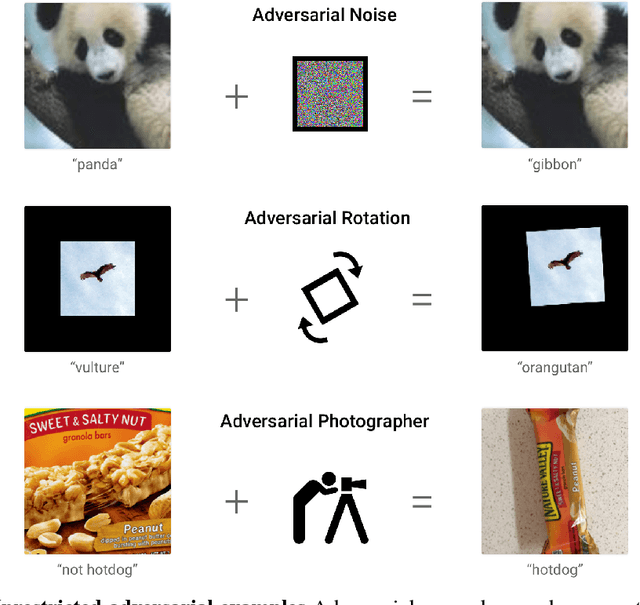
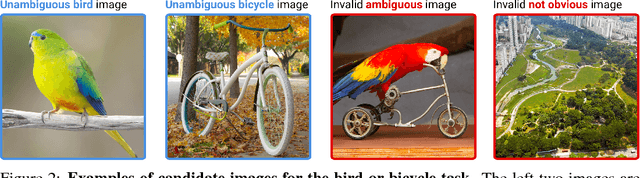
We introduce a two-player contest for evaluating the safety and robustness of machine learning systems, with a large prize pool. Unlike most prior work in ML robustness, which studies norm-constrained adversaries, we shift our focus to unconstrained adversaries. Defenders submit machine learning models, and try to achieve high accuracy and coverage on non-adversarial data while making no confident mistakes on adversarial inputs. Attackers try to subvert defenses by finding arbitrary unambiguous inputs where the model assigns an incorrect label with high confidence. We propose a simple unambiguous dataset ("bird-or- bicycle") to use as part of this contest. We hope this contest will help to more comprehensively evaluate the worst-case adversarial risk of machine learning models.
Is Generator Conditioning Causally Related to GAN Performance?
Jun 19, 2018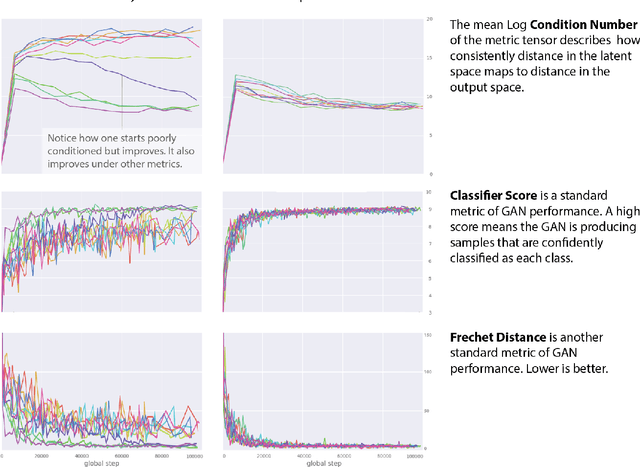
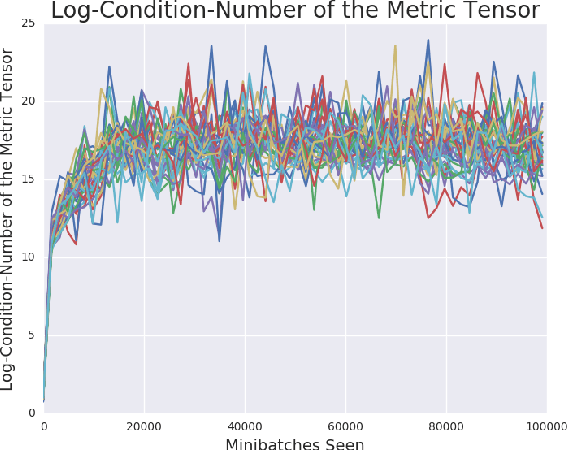
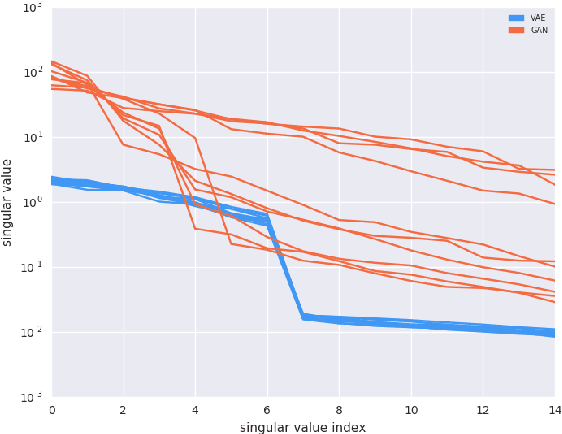
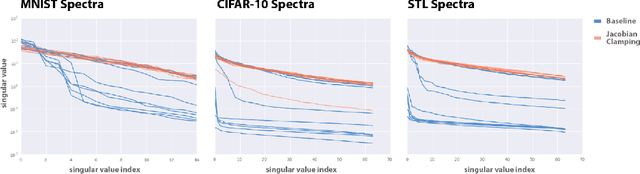
Recent work (Pennington et al, 2017) suggests that controlling the entire distribution of Jacobian singular values is an important design consideration in deep learning. Motivated by this, we study the distribution of singular values of the Jacobian of the generator in Generative Adversarial Networks (GANs). We find that this Jacobian generally becomes ill-conditioned at the beginning of training. Moreover, we find that the average (with z from p(z)) conditioning of the generator is highly predictive of two other ad-hoc metrics for measuring the 'quality' of trained GANs: the Inception Score and the Frechet Inception Distance (FID). We test the hypothesis that this relationship is causal by proposing a 'regularization' technique (called Jacobian Clamping) that softly penalizes the condition number of the generator Jacobian. Jacobian Clamping improves the mean Inception Score and the mean FID for GANs trained on several datasets. It also greatly reduces inter-run variance of the aforementioned scores, addressing (at least partially) one of the main criticisms of GANs.
Adversarial Patch
May 17, 2018



We present a method to create universal, robust, targeted adversarial image patches in the real world. The patches are universal because they can be used to attack any scene, robust because they work under a wide variety of transformations, and targeted because they can cause a classifier to output any target class. These adversarial patches can be printed, added to any scene, photographed, and presented to image classifiers; even when the patches are small, they cause the classifiers to ignore the other items in the scene and report a chosen target class. To reproduce the results from the paper, our code is available at https://github.com/tensorflow/cleverhans/tree/master/examples/adversarial_patch
Deep reinforcement learning from human preferences
Jul 13, 2017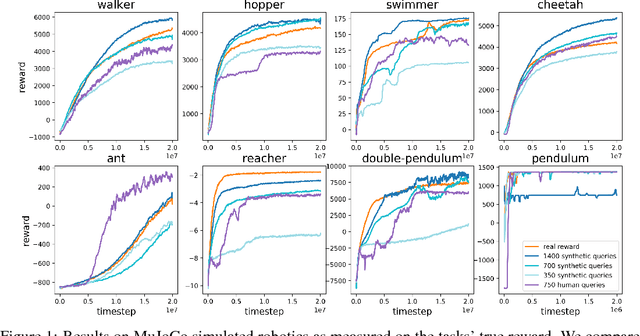
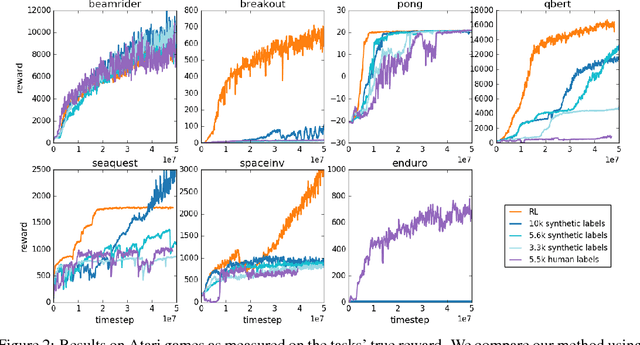
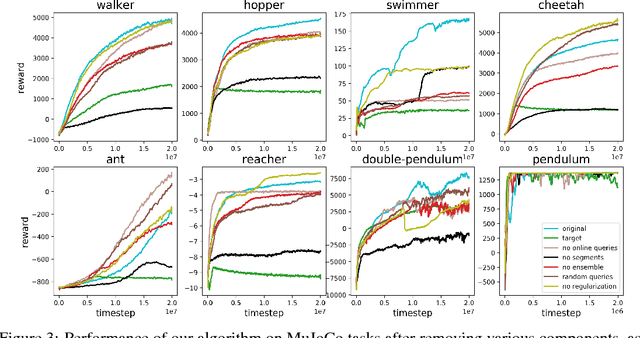
For sophisticated reinforcement learning (RL) systems to interact usefully with real-world environments, we need to communicate complex goals to these systems. In this work, we explore goals defined in terms of (non-expert) human preferences between pairs of trajectory segments. We show that this approach can effectively solve complex RL tasks without access to the reward function, including Atari games and simulated robot locomotion, while providing feedback on less than one percent of our agent's interactions with the environment. This reduces the cost of human oversight far enough that it can be practically applied to state-of-the-art RL systems. To demonstrate the flexibility of our approach, we show that we can successfully train complex novel behaviors with about an hour of human time. These behaviors and environments are considerably more complex than any that have been previously learned from human feedback.