 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



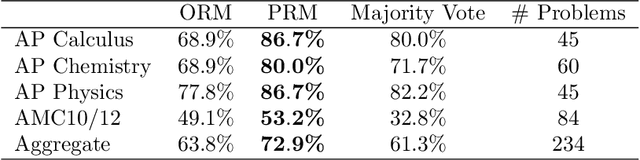
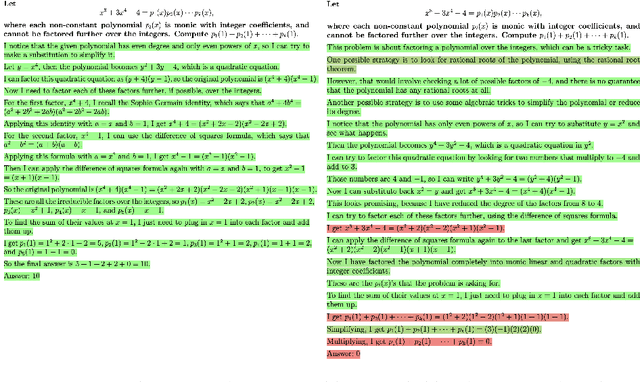
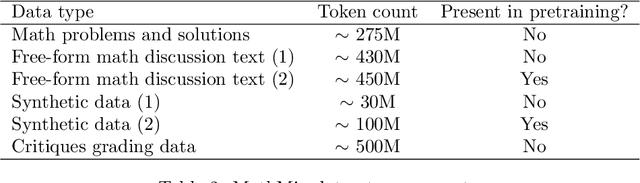
The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Let's Verify Step by Step
May 31, 2023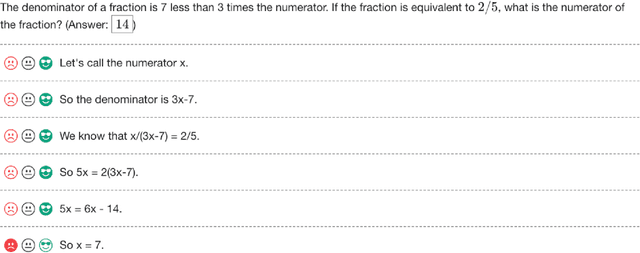
In recent years, large language models have greatly improved in their ability to perform complex multi-step reasoning. However, even state-of-the-art models still regularly produce logical mistakes. To train more reliable models, we can turn either to outcome supervision, which provides feedback for a final result, or process supervision, which provides feedback for each intermediate reasoning step. Given the importance of training reliable models, and given the high cost of human feedback, it is important to carefully compare the both methods. Recent work has already begun this comparison, but many questions still remain. We conduct our own investigation, finding that process supervision significantly outperforms outcome supervision for training models to solve problems from the challenging MATH dataset. Our process-supervised model solves 78% of problems from a representative subset of the MATH test set. Additionally, we show that active learning significantly improves the efficacy of process supervision. To support related research, we also release PRM800K, the complete dataset of 800,000 step-level human feedback labels used to train our best reward model.
WebGPT: Browser-assisted question-answering with human feedback
Dec 17, 2021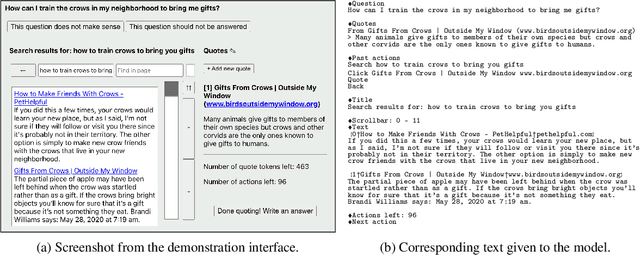
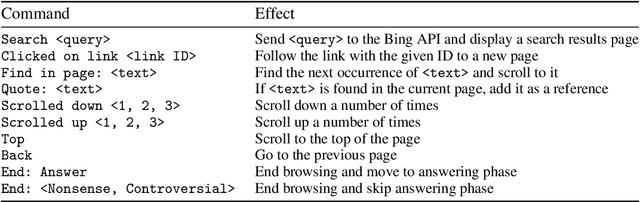
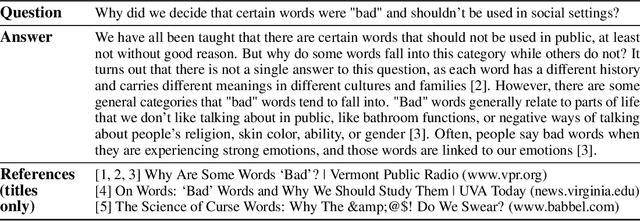
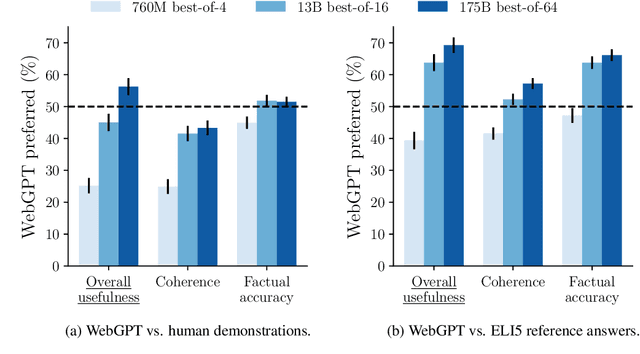
We fine-tune GPT-3 to answer long-form questions using a text-based web-browsing environment, which allows the model to search and navigate the web. By setting up the task so that it can be performed by humans, we are able to train models on the task using imitation learning, and then optimize answer quality with human feedback. To make human evaluation of factual accuracy easier, models must collect references while browsing in support of their answers. We train and evaluate our models on ELI5, a dataset of questions asked by Reddit users. Our best model is obtained by fine-tuning GPT-3 using behavior cloning, and then performing rejection sampling against a reward model trained to predict human preferences. This model's answers are preferred by humans 56% of the time to those of our human demonstrators, and 69% of the time to the highest-voted answer from Reddit.
Training Verifiers to Solve Math Word Problems
Nov 18, 2021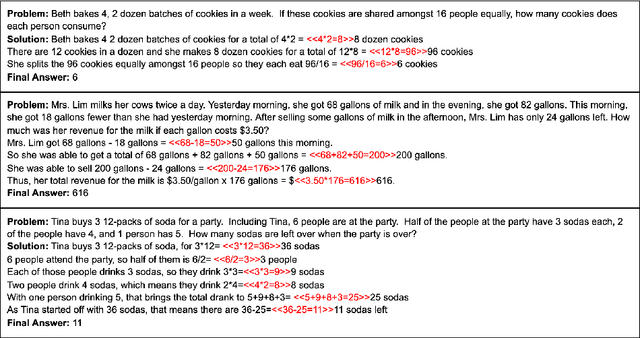
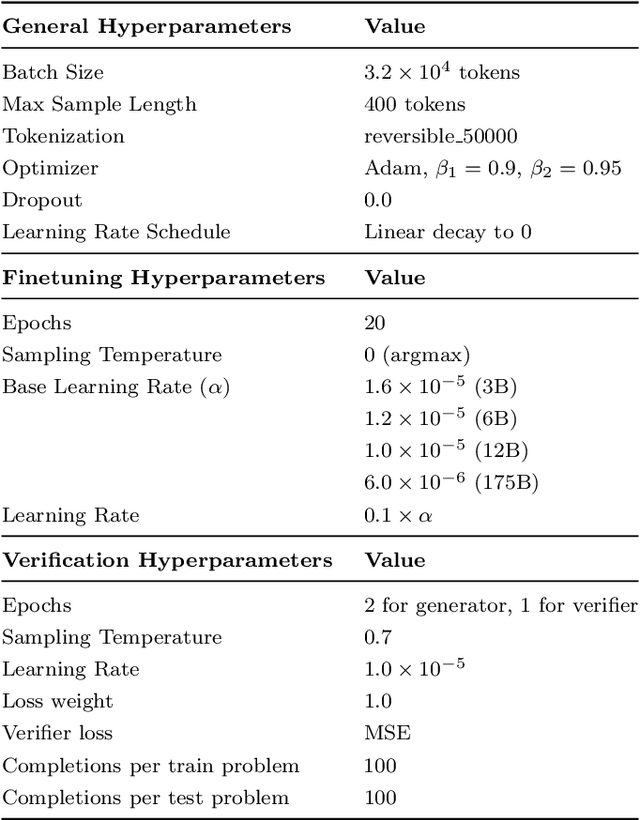
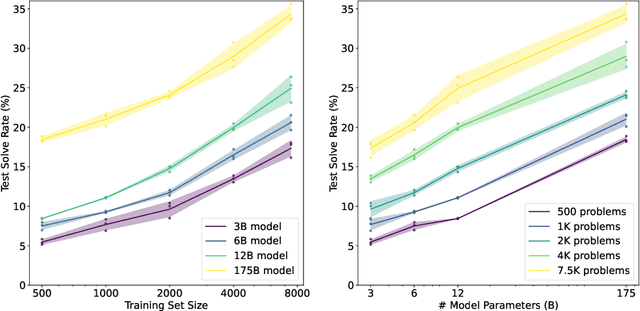
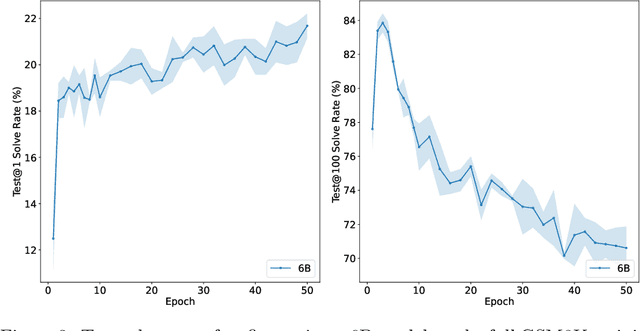
State-of-the-art language models can match human performance on many tasks, but they still struggle to robustly perform multi-step mathematical reasoning. To diagnose the failures of current models and support research, we introduce GSM8K, a dataset of 8.5K high quality linguistically diverse grade school math word problems. We find that even the largest transformer models fail to achieve high test performance, despite the conceptual simplicity of this problem distribution. To increase performance, we propose training verifiers to judge the correctness of model completions. At test time, we generate many candidate solutions and select the one ranked highest by the verifier. We demonstrate that verification significantly improves performance on GSM8K, and we provide strong empirical evidence that verification scales more effectively with increased data than a finetuning baseline.
Batch size-invariance for policy optimization
Oct 01, 2021
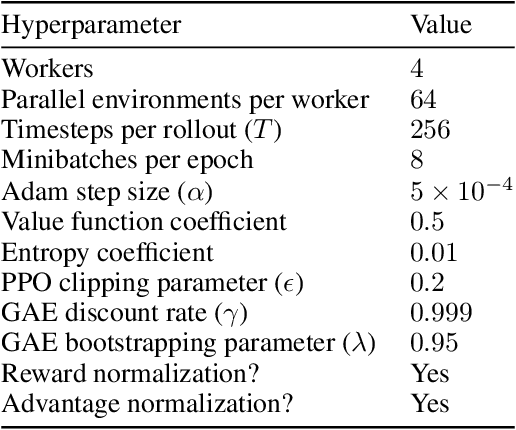
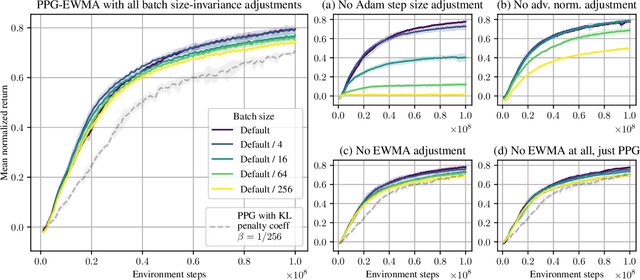
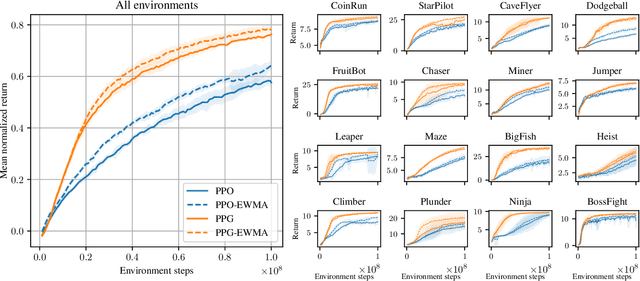
We say an algorithm is batch size-invariant if changes to the batch size can largely be compensated for by changes to other hyperparameters. Stochastic gradient descent is well-known to have this property at small batch sizes, via the learning rate. However, some policy optimization algorithms (such as PPO) do not have this property, because of how they control the size of policy updates. In this work we show how to make these algorithms batch size-invariant. Our key insight is to decouple the proximal policy (used for controlling policy updates) from the behavior policy (used for off-policy corrections). Our experiments help explain why these algorithms work, and additionally show how they can make more efficient use of stale data.
Measuring Sample Efficiency and Generalization in Reinforcement Learning Benchmarks: NeurIPS 2020 Procgen Benchmark
Mar 29, 2021
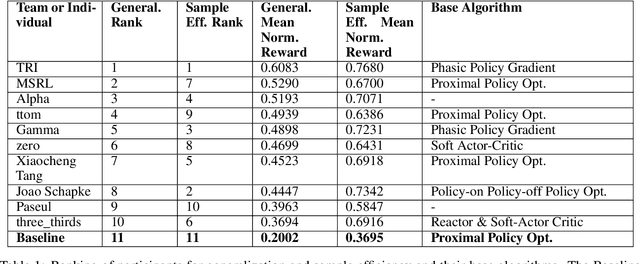
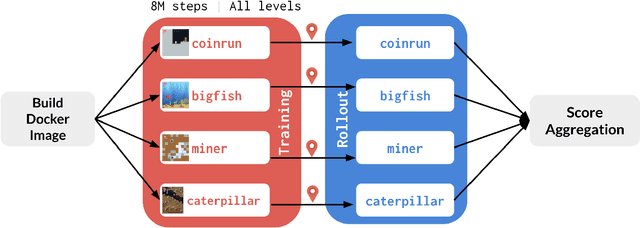
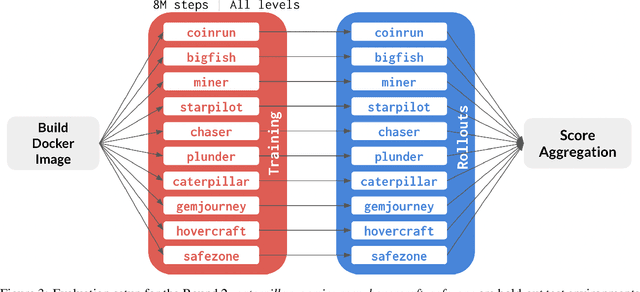
The NeurIPS 2020 Procgen Competition was designed as a centralized benchmark with clearly defined tasks for measuring Sample Efficiency and Generalization in Reinforcement Learning. Generalization remains one of the most fundamental challenges in deep reinforcement learning, and yet we do not have enough benchmarks to measure the progress of the community on Generalization in Reinforcement Learning. We present the design of a centralized benchmark for Reinforcement Learning which can help measure Sample Efficiency and Generalization in Reinforcement Learning by doing end to end evaluation of the training and rollout phases of thousands of user submitted code bases in a scalable way. We designed the benchmark on top of the already existing Procgen Benchmark by defining clear tasks and standardizing the end to end evaluation setups. The design aims to maximize the flexibility available for researchers who wish to design future iterations of such benchmarks, and yet imposes necessary practical constraints to allow for a system like this to scale. This paper presents the competition setup and the details and analysis of the top solutions identified through this setup in context of 2020 iteration of the competition at NeurIPS.
Phasic Policy Gradient
Sep 09, 2020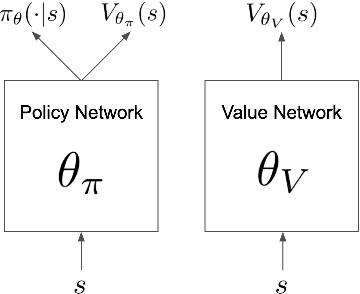

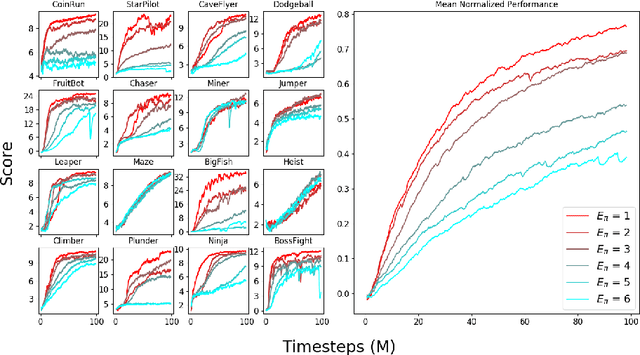

We introduce Phasic Policy Gradient (PPG), a reinforcement learning framework which modifies traditional on-policy actor-critic methods by separating policy and value function training into distinct phases. In prior methods, one must choose between using a shared network or separate networks to represent the policy and value function. Using separate networks avoids interference between objectives, while using a shared network allows useful features to be shared. PPG is able to achieve the best of both worlds by splitting optimization into two phases, one that advances training and one that distills features. PPG also enables the value function to be more aggressively optimized with a higher level of sample reuse. Compared to PPO, we find that PPG significantly improves sample efficiency on the challenging Procgen Benchmark.
Leveraging Procedural Generation to Benchmark Reinforcement Learning
Dec 03, 2019

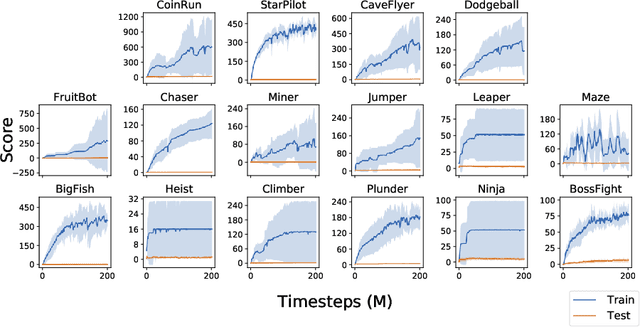

In this report, we introduce Procgen Benchmark, a suite of 16 procedurally generated game-like environments designed to benchmark both sample efficiency and generalization in reinforcement learning. We believe that the community will benefit from increased access to high quality training environments, and we provide detailed experimental protocols for using this benchmark. We empirically demonstrate that diverse environment distributions are essential to adequately train and evaluate RL agents, thereby motivating the extensive use of procedural content generation. We then use this benchmark to investigate the effects of scaling model size, finding that larger models significantly improve both sample efficiency and generalization.
Quantifying Generalization in Reinforcement Learning
Dec 20, 2018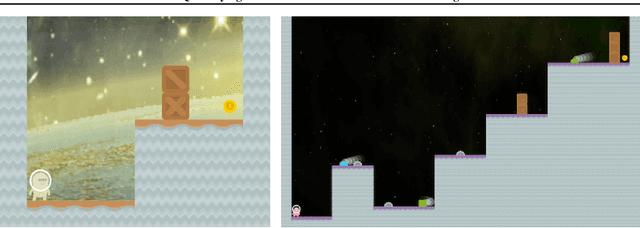

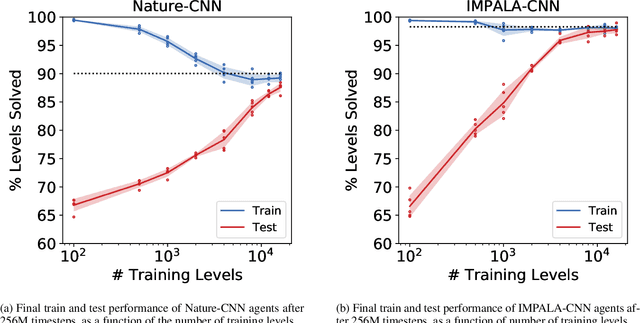
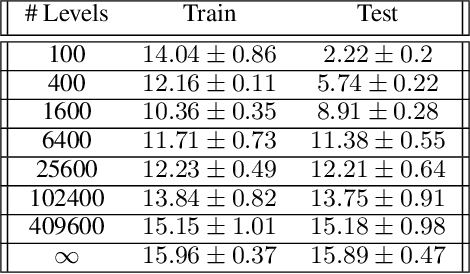
In this paper, we investigate the problem of overfitting in deep reinforcement learning. Among the most common benchmarks in RL, it is customary to use the same environments for both training and testing. This practice offers relatively little insight into an agent's ability to generalize. We address this issue by using procedurally generated environments to construct distinct training and test sets. Most notably, we introduce a new environment called CoinRun, designed as a benchmark for generalization in RL. Using CoinRun, we find that agents overfit to surprisingly large training sets. We then show that deeper convolutional architectures improve generalization, as do methods traditionally found in supervised learning, including L2 regularization, dropout, data augmentation and batch normalization.