 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGyroCopter: Differential Bearing Measuring Trajectory Planner for Tracking and Localizing Radio Frequency Sources
Oct 16, 2024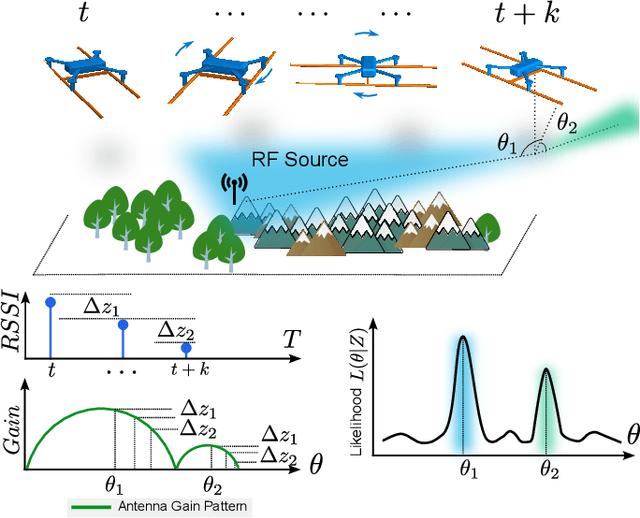
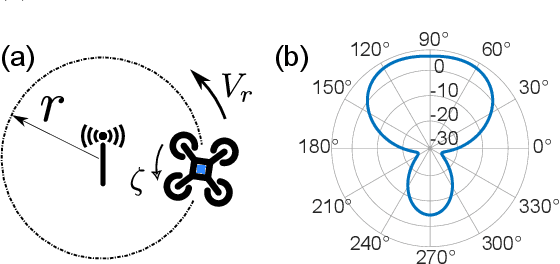
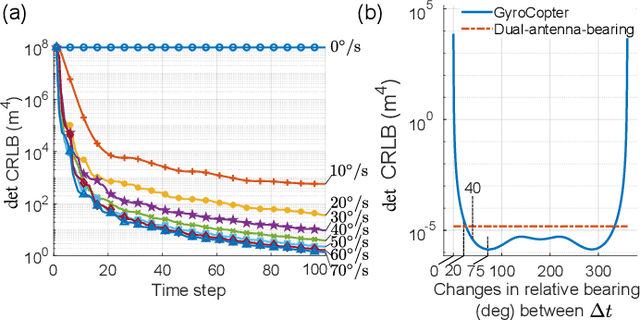
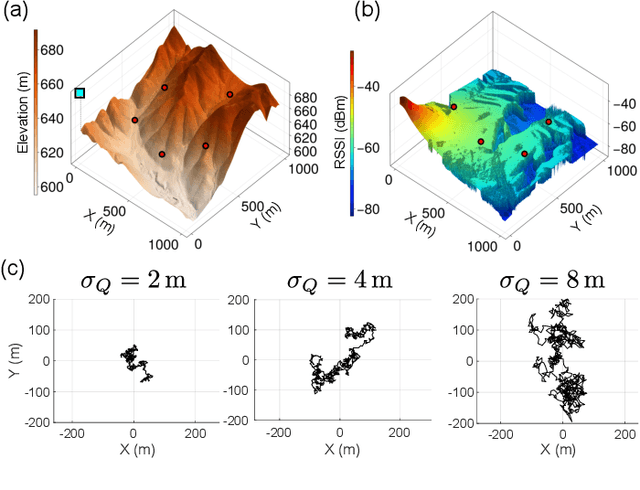
Autonomous aerial vehicles can provide efficient and effective solutions for radio frequency (RF) source tracking and localizing problems with applications ranging from wildlife conservation to search and rescue operations. Existing lightweight, low-cost, bearing measurements-based methods with a single antenna-receiver sensor system configurations necessitate in situ rotations, leading to substantial measurement acquisition times restricting searchable areas and number of measurements. We propose a GyroCopter for the task. Our approach plans the trajectory of a multi-rotor unmanned aerial vehicle (UAV) whilst utilizing UAV flight dynamics to execute a constant gyration motion to derive "pseudo-bearing" measurements to track RF sources. The gyration-based pseudo-bearing approach: i) significantly reduces the limitations associated with in situ rotation bearing; while ii) capitalizing on the simplicity, affordability, and lightweight nature of signal strength measurement acquisition hardware to estimate bearings. This method distinguishes itself from other pseudo-bearing approaches by eliminating the need for additional hardware to maintain simplicity, lightweightness and cost-effectiveness. To validate our approach, we derived the optimal rotation speed and conducted extensive simulations and field missions with our GyroCopter to track and localize multiple RF sources. The results confirm the effectiveness of our method, highlighting its potential as a practical and rapid solution for RF source localization tasks.
ConservationBots: Autonomous Aerial Robot for Fast Robust Wildlife Tracking in Complex Terrains
Aug 17, 2023Today, the most widespread, widely applicable technology for gathering data relies on experienced scientists armed with handheld radio telemetry equipment to locate low-power radio transmitters attached to wildlife from the ground. Although aerial robots can transform labor-intensive conservation tasks, the realization of autonomous systems for tackling task complexities under real-world conditions remains a challenge. We developed ConservationBots-small aerial robots for tracking multiple, dynamic, radio-tagged wildlife. The aerial robot achieves robust localization performance and fast task completion times -- significant for energy-limited aerial systems while avoiding close encounters with potential, counter-productive disturbances to wildlife. Our approach overcomes the technical and practical problems posed by combining a lightweight sensor with new concepts: i) planning to determine both trajectory and measurement actions guided by an information-theoretic objective, which allows the robot to strategically select near-instantaneous range-only measurements to achieve faster localization, and time-consuming sensor rotation actions to acquire bearing measurements and achieve robust tracking performance; ii) a bearing detector more robust to noise and iii) a tracking algorithm formulation robust to missed and false detections experienced in real-world conditions. We conducted extensive studies: simulations built upon complex signal propagation over high-resolution elevation data on diverse geographical terrains; field testing; studies with wombats (Lasiorhinus latifrons; nocturnal, vulnerable species dwelling in underground warrens) and tracking comparisons with a highly experienced biologist to validate the effectiveness of our aerial robot and demonstrate the significant advantages over the manual method.
Social-BiGAT: Multimodal Trajectory Forecasting using Bicycle-GAN and Graph Attention Networks
Jul 17, 2019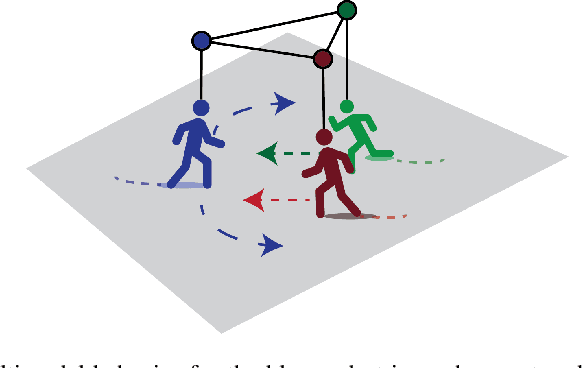
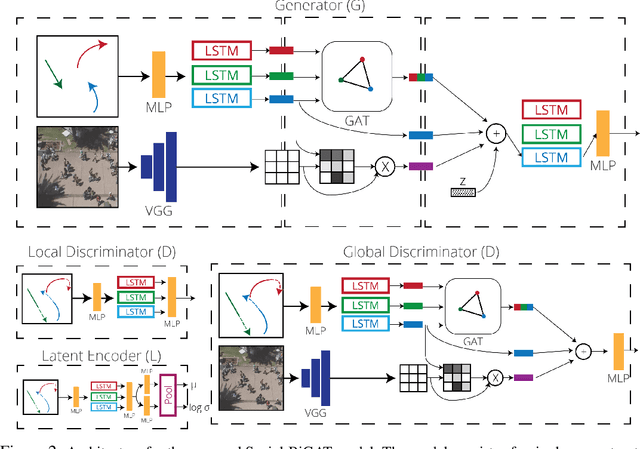
Predicting the future trajectories of multiple interacting agents in a scene has become an increasingly important problem for many different applications ranging from control of autonomous vehicles and social robots to security and surveillance. This problem is compounded by the presence of social interactions between humans and their physical interactions with the scene. While the existing literature has explored some of these cues, they mainly ignored the multimodal nature of each human's future trajectory. In this paper, we present Social-BiGAT, a graph-based generative adversarial network that generates realistic, multimodal trajectory predictions by better modelling the social interactions of pedestrians in a scene. Our method is based on a graph attention network (GAT) that learns reliable feature representations that encode the social interactions between humans in the scene, and a recurrent encoder-decoder architecture that is trained adversarially to predict, based on the features, the humans' paths. We explicitly account for the multimodal nature of the prediction problem by forming a reversible transformation between each scene and its latent noise vector, as in Bicycle-GAN. We show that our framework achieves state-of-the-art performance comparing it to several baselines on existing trajectory forecasting benchmarks.
SparseSense: Human Activity Recognition from Highly Sparse Sensor Data-streams Using Set-based Neural Networks
Jun 06, 2019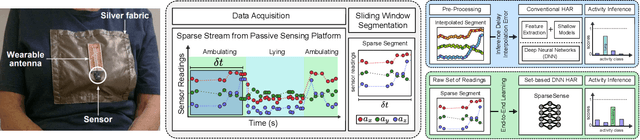
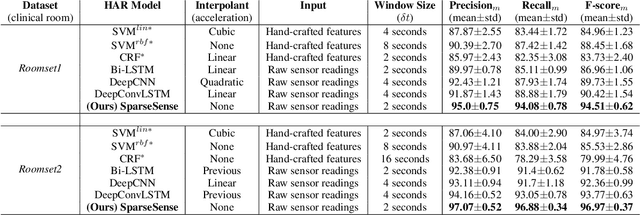
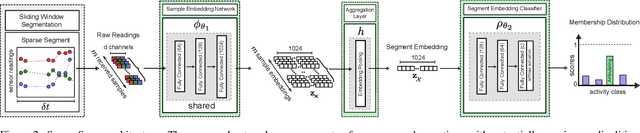
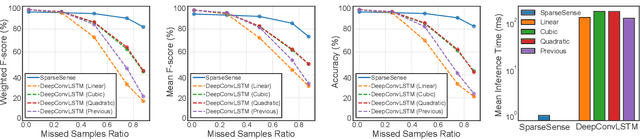
Batteryless or so called passive wearables are providing new and innovative methods for human activity recognition (HAR), especially in healthcare applications for older people. Passive sensors are low cost, lightweight, unobtrusive and desirably disposable; attractive attributes for healthcare applications in hospitals and nursing homes. Despite the compelling propositions for sensing applications, the data streams from these sensors are characterised by high sparsity---the time intervals between sensor readings are irregular while the number of readings per unit time are often limited. In this paper, we rigorously explore the problem of learning activity recognition models from temporally sparse data. We describe how to learn directly from sparse data using a deep learning paradigm in an end-to-end manner. We demonstrate significant classification performance improvements on real-world passive sensor datasets from older people over the state-of-the-art deep learning human activity recognition models. Further, we provide insights into the model's behaviour through complementary experiments on a benchmark dataset and visualisation of the learned activity feature spaces.
Deep Perm-Set Net: Learn to predict sets with unknown permutation and cardinality using deep neural networks
Oct 02, 2018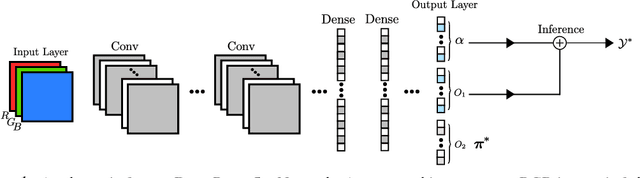
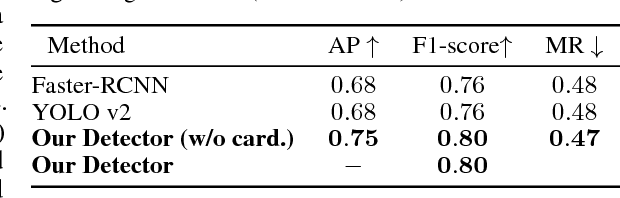
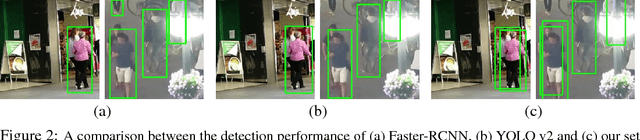
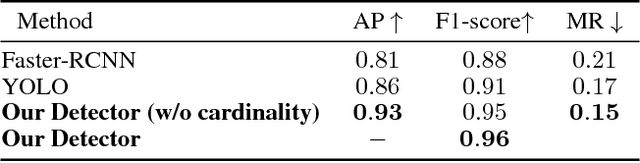
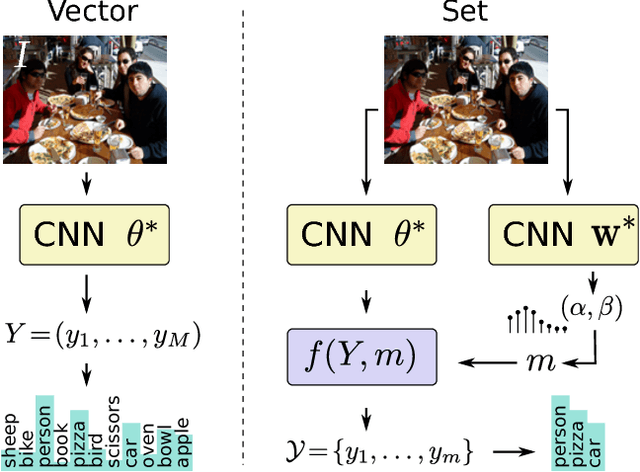
Many real-world problems, e.g. object detection, have outputs that are naturally expressed as sets of entities. This creates a challenge for traditional deep neural networks which naturally deal with structured outputs such as vectors, matrices or tensors. We present a novel approach for learning to predict sets with unknown permutation and cardinality using deep neural networks. Specifically, in our formulation we incorporate the permutation as unobservable variable and estimate its distribution during the learning process using alternating optimization. We demonstrate the validity of this new formulation on two relevant vision problems: object detection, for which our formulation outperforms state-of-the-art detectors such as Faster R-CNN and YOLO, and a complex CAPTCHA test, where we observe that, surprisingly, our set based network acquired the ability of mimicking arithmetics without any rules being coded.
SoPhie: An Attentive GAN for Predicting Paths Compliant to Social and Physical Constraints
Sep 20, 2018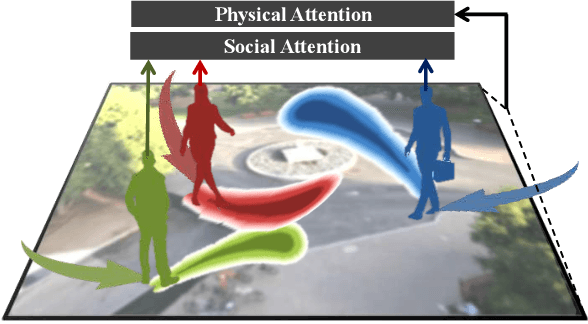
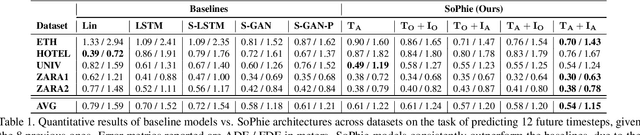
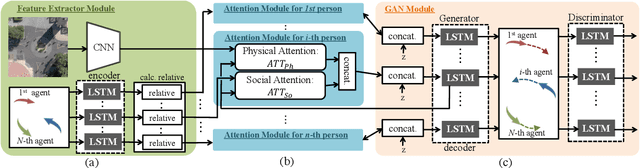

This paper addresses the problem of path prediction for multiple interacting agents in a scene, which is a crucial step for many autonomous platforms such as self-driving cars and social robots. We present \textit{SoPhie}; an interpretable framework based on Generative Adversarial Network (GAN), which leverages two sources of information, the path history of all the agents in a scene, and the scene context information, using images of the scene. To predict a future path for an agent, both physical and social information must be leveraged. Previous work has not been successful to jointly model physical and social interactions. Our approach blends a social attention mechanism with a physical attention that helps the model to learn where to look in a large scene and extract the most salient parts of the image relevant to the path. Whereas, the social attention component aggregates information across the different agent interactions and extracts the most important trajectory information from the surrounding neighbors. SoPhie also takes advantage of GAN to generates more realistic samples and to capture the uncertain nature of the future paths by modeling its distribution. All these mechanisms enable our approach to predict socially and physically plausible paths for the agents and to achieve state-of-the-art performance on several different trajectory forecasting benchmarks.
TrackerBots: Autonomous UAV for Real-Time Localization and Tracking of Multiple Radio-Tagged Animals
Sep 20, 2018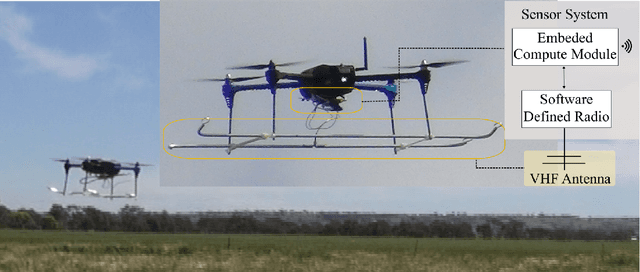



Autonomous aerial robots provide new possibilities to study the habitats and behaviors of endangered species through the efficient gathering of location information at temporal and spatial granularities not possible with traditional manual survey methods. We present a novel autonomous aerial vehicle system-TrackerBots-to track and localize multiple radio-tagged animals. The simplicity of measuring the received signal strength indicator (RSSI) values of very high frequency (VHF) radio-collars commonly used in the field is exploited to realize a low cost and lightweight tracking platform suitable for integration with unmanned aerial vehicles (UAVs). Due to uncertainty and the nonlinearity of the system based on RSSI measurements, our tracking and planning approaches integrate a particle filter for tracking and localizing; a partially observable Markov decision process (POMDP) for dynamic path planning. This approach allows autonomous navigation of a UAV in a direction of maximum information gain to locate multiple mobile animals and reduce exploration time; and, consequently, conserve onboard battery power. We also employ the concept of a search termination criteria to maximize the number of located animals within power constraints of the aerial system. We validated our real-time and online approach through both extensive simulations and field experiments with two mobile VHF radio-tags.
* Submitted to the Journal of Field Robotics
Joint Learning of Set Cardinality and State Distribution
Nov 21, 2017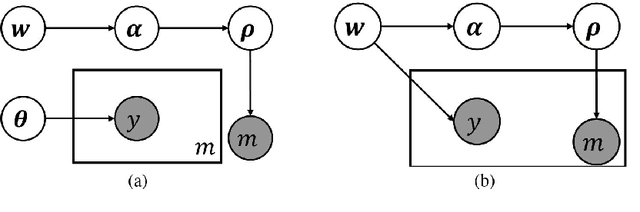
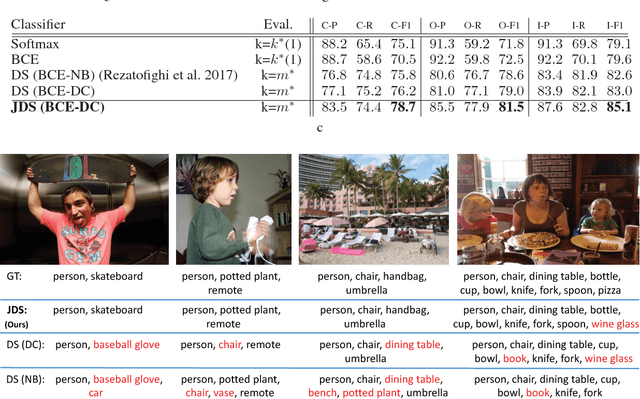
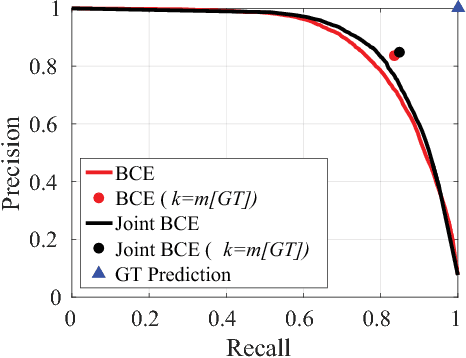
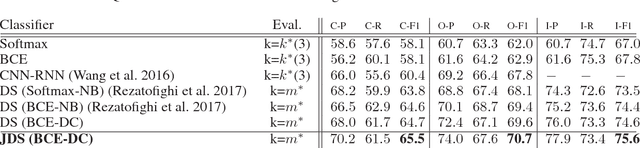
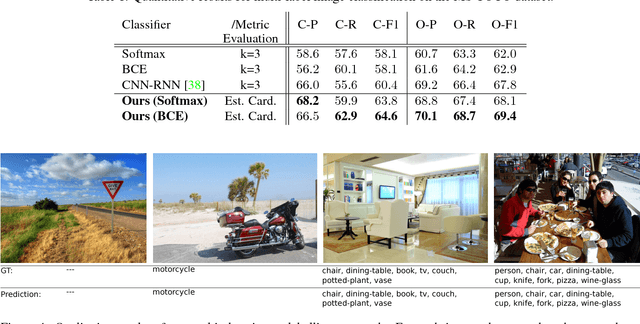
We present a novel approach for learning to predict sets using deep learning. In recent years, deep neural networks have shown remarkable results in computer vision, natural language processing and other related problems. Despite their success, traditional architectures suffer from a serious limitation in that they are built to deal with structured input and output data, i.e. vectors or matrices. Many real-world problems, however, are naturally described as sets, rather than vectors. Existing techniques that allow for sequential data, such as recurrent neural networks, typically heavily depend on the input and output order and do not guarantee a valid solution. Here, we derive in a principled way, a mathematical formulation for set prediction where the output is permutation invariant. In particular, our approach jointly learns both the cardinality and the state distribution of the target set. We demonstrate the validity of our method on the task of multi-label image classification and achieve a new state of the art on the PASCAL VOC and MS COCO datasets.
DeepSetNet: Predicting Sets with Deep Neural Networks
Aug 11, 2017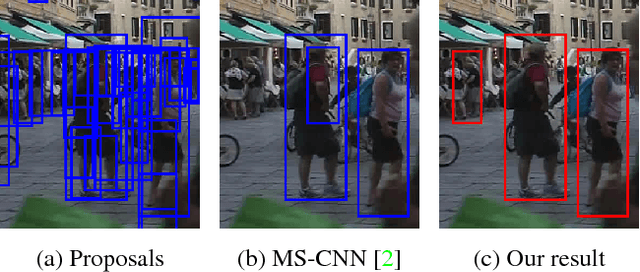
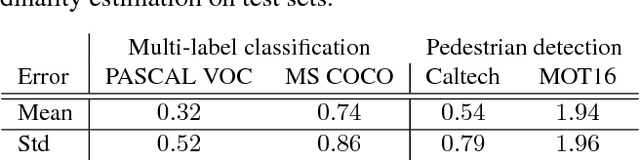
This paper addresses the task of set prediction using deep learning. This is important because the output of many computer vision tasks, including image tagging and object detection, are naturally expressed as sets of entities rather than vectors. As opposed to a vector, the size of a set is not fixed in advance, and it is invariant to the ordering of entities within it. We define a likelihood for a set distribution and learn its parameters using a deep neural network. We also derive a loss for predicting a discrete distribution corresponding to set cardinality. Set prediction is demonstrated on the problem of multi-class image classification. Moreover, we show that the proposed cardinality loss can also trivially be applied to the tasks of object counting and pedestrian detection. Our approach outperforms existing methods in all three cases on standard datasets.