 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Mean of Multi-Object Trajectories
Apr 29, 2025



This paper introduces the concept of a mean for trajectories and multi-object trajectories--sets or multi-sets of trajectories--along with algorithms for computing them. Specifically, we use the Fr\'{e}chet mean, and metrics based on the optimal sub-pattern assignment (OSPA) construct, to extend the notion of average from vectors to trajectories and multi-object trajectories. Further, we develop efficient algorithms to compute these means using greedy search and Gibbs sampling. Using distributed multi-object tracking as an application, we demonstrate that the Fr\'{e}chet mean approach to multi-object trajectory consensus significantly outperforms state-of-the-art distributed multi-object tracking methods.
$\textit{UniSaT}$: Unified-Objective Belief Model and Planner to Search for and Track Multiple Objects
May 25, 2024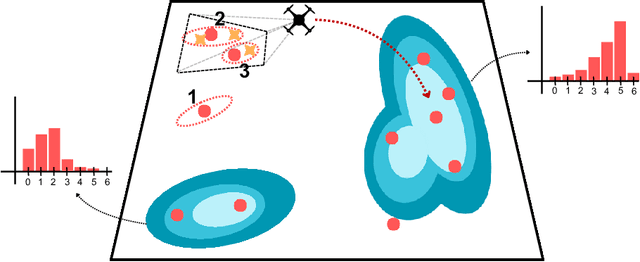
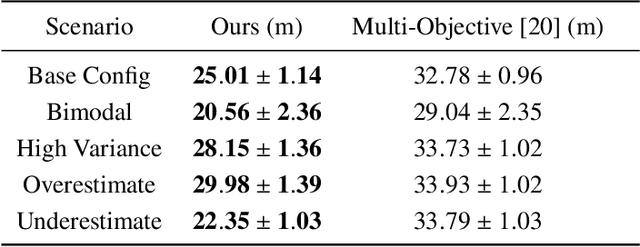
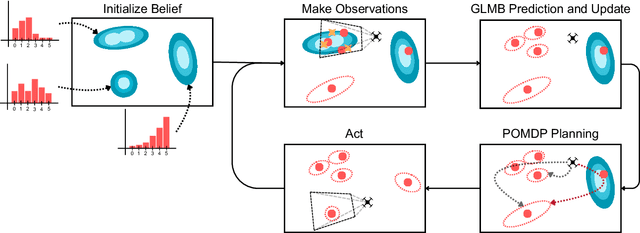
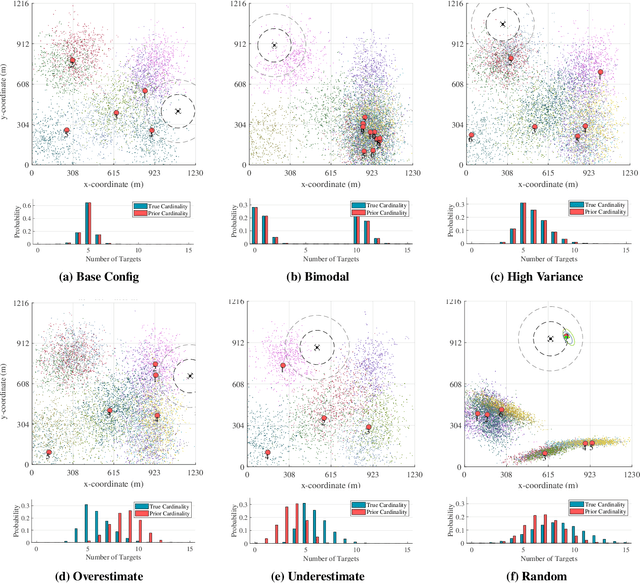
The problem of path planning for autonomously searching and tracking multiple objects is important to reconnaissance, surveillance, and many other data-gathering applications. Due to the inherent competing objectives of searching for new objects while maintaining tracks for found objects, most current approaches rely on multi-objective planning methods, leaving it up to the user to tune parameters to balance between the two objectives, usually based on heuristics or trial and error. In this paper, we introduce $\textit{UniSaT}$ ($\textit{Unified Search and Track}$), a unified-objective formulation for the search and track problem based on Random Finite Sets (RFS). This is done by modeling both the unknown and known objects through a combined generalized labeled multi-Bernoulli (GLMB) filter. For the unseen objects, we can leverage both cardinality and spatial prior distributions, which means $\textit{UniSaT}$ does not rely on knowing the exact count of the expected number of objects in the space. The planner maximizes the mutual information of this unified belief model, creating balanced search and tracking behaviors. We demonstrate our work in a simulated environment and show both qualitative results as well as quantitative improvements over a multi-objective method.
The Smooth Trajectory Estimator for LMB Filters
Jan 01, 2024This paper proposes a smooth-trajectory estimator for the labelled multi-Bernoulli (LMB) filter by exploiting the special structure of the generalised labelled multi-Bernoulli (GLMB) filter. We devise a simple and intuitive approach to store the best association map when approximating the GLMB random finite set (RFS) to the LMB RFS. In particular, we construct a smooth-trajectory estimator (i.e., an estimator over the entire trajectories of labelled estimates) for the LMB filter based on the history of the best association map and all of the measurements up to the current time. Experimental results under two challenging scenarios demonstrate significant tracking accuracy improvements with negligible additional computational time compared to the conventional LMB filter. The source code is publicly available at https://tinyurl.com/ste-lmb, aimed at promoting advancements in MOT algorithms.
Distributed Multi-Object Tracking Under Limited Field of View Heterogeneous Sensors with Density Clustering
Dec 31, 2023



We consider the problem of tracking multiple, unknown, and time-varying numbers of objects using a distributed network of heterogeneous sensors. In an effort to derive a formulation for practical settings, we consider limited and unknown sensor field-of-views (FoVs), sensors with limited local computational resources and communication channel capacity. The resulting distributed multi-object tracking algorithm involves solving an NP-hard multidimensional assignment problem either optimally for small-size problems or sub-optimally for general practical problems. For general problems, we propose an efficient distributed multi-object tracking algorithm that performs track-to-track fusion using a clustering-based analysis of the state space transformed into a density space to mitigate the complexity of the assignment problem. The proposed algorithm can more efficiently group local track estimates for fusion than existing approaches. To ensure we achieve globally consistent identities for tracks across a network of nodes as objects move between FoVs, we develop a graph-based algorithm to achieve label consensus and minimise track segmentation. Numerical experiments with a synthetic and a real-world trajectory dataset demonstrate that our proposed method is significantly more computationally efficient than state-of-the-art solutions, achieving similar tracking accuracy and bandwidth requirements but with improved label consistency.
Label Space Partition Selection for Multi-Object Tracking Using Two-Layer Partitioning
Oct 23, 2023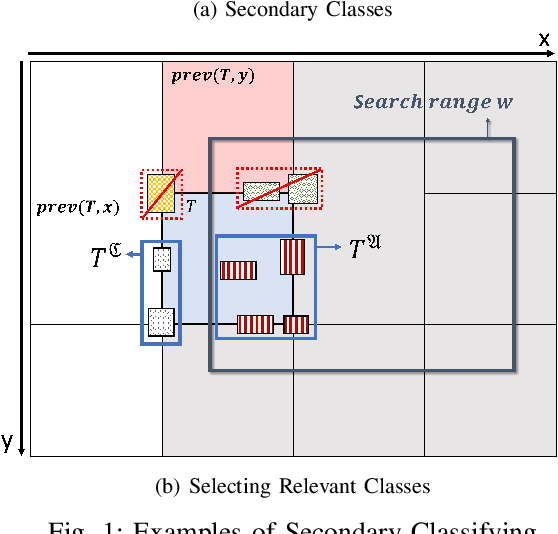
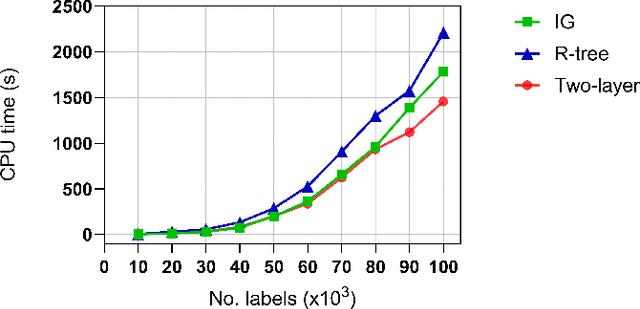
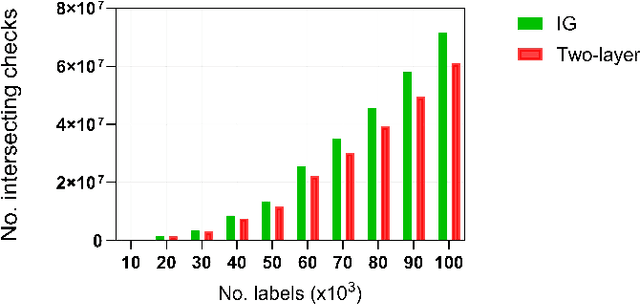
Estimating the trajectories of multi-objects poses a significant challenge due to data association ambiguity, which leads to a substantial increase in computational requirements. To address such problems, a divide-and-conquer manner has been employed with parallel computation. In this strategy, distinguished objects that have unique labels are grouped based on their statistical dependencies, the intersection of predicted measurements. Several geometry approaches have been used for label grouping since finding all intersected label pairs is clearly infeasible for large-scale tracking problems. This paper proposes an efficient implementation of label grouping for label-partitioned generalized labeled multi-Bernoulli filter framework using a secondary partitioning technique. This allows for parallel computation in the label graph indexing step, avoiding generating and eliminating duplicate comparisons. Additionally, we compare the performance of the proposed technique with several efficient spatial searching algorithms. The results demonstrate the superior performance of the proposed approach on large-scale data sets, enabling scalable trajectory estimation.
ConservationBots: Autonomous Aerial Robot for Fast Robust Wildlife Tracking in Complex Terrains
Aug 17, 2023Today, the most widespread, widely applicable technology for gathering data relies on experienced scientists armed with handheld radio telemetry equipment to locate low-power radio transmitters attached to wildlife from the ground. Although aerial robots can transform labor-intensive conservation tasks, the realization of autonomous systems for tackling task complexities under real-world conditions remains a challenge. We developed ConservationBots-small aerial robots for tracking multiple, dynamic, radio-tagged wildlife. The aerial robot achieves robust localization performance and fast task completion times -- significant for energy-limited aerial systems while avoiding close encounters with potential, counter-productive disturbances to wildlife. Our approach overcomes the technical and practical problems posed by combining a lightweight sensor with new concepts: i) planning to determine both trajectory and measurement actions guided by an information-theoretic objective, which allows the robot to strategically select near-instantaneous range-only measurements to achieve faster localization, and time-consuming sensor rotation actions to acquire bearing measurements and achieve robust tracking performance; ii) a bearing detector more robust to noise and iii) a tracking algorithm formulation robust to missed and false detections experienced in real-world conditions. We conducted extensive studies: simulations built upon complex signal propagation over high-resolution elevation data on diverse geographical terrains; field testing; studies with wombats (Lasiorhinus latifrons; nocturnal, vulnerable species dwelling in underground warrens) and tracking comparisons with a highly experienced biologist to validate the effectiveness of our aerial robot and demonstrate the significant advantages over the manual method.
Robust multi-sensor GLMB filter: An application to multi-target tracking with bearing-only sensors
Jun 01, 2021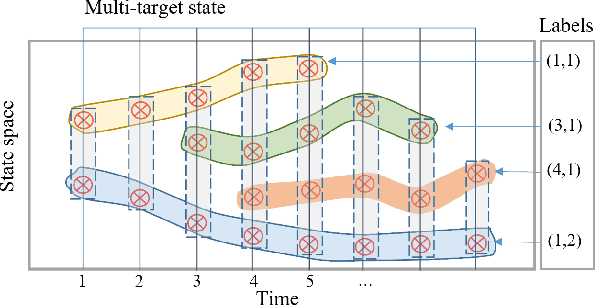
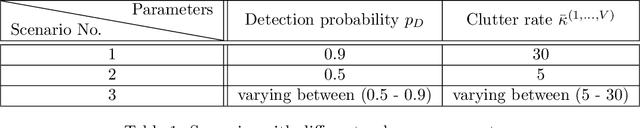
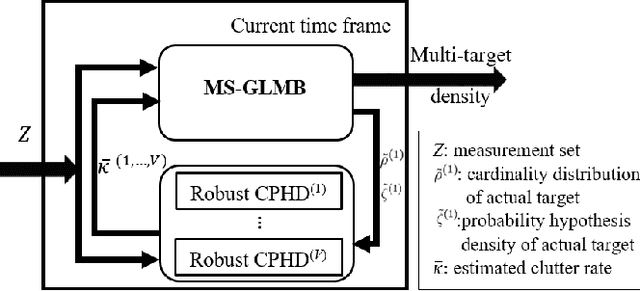

This paper proposes an efficient and robust algorithm to estimate target trajectories via multi-sensor bearing-only measurements with unknown target detection profiles and clutter rates. In particular, we propose to combine the multi-sensor Generalized Labeled Multi-Bernoulli (MS-GLMB) filter to estimate target trajectories and robust Cardinalized Probability Hypothesis Density (CPHD) filters to estimate the clutter rates. Experimental results show that the proposed robust filter exhibits near-optimal performance in the sense that it is comparable to the optimal MS-GLMB operating with the true clutter rate. More importantly, it outperforms other studied filters when the detection profile and clutter rate are unknown an time-variant. This is attributed to the ability of the robust filter to learn the background parameters on-the-fly.
Distributed Multi-object Tracking under Limited Field of View Sensors
Dec 23, 2020

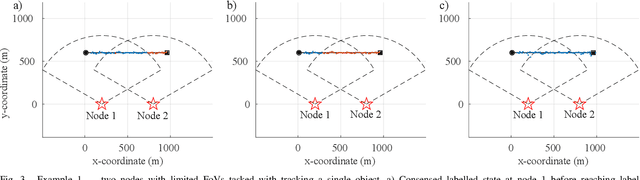

We consider the challenging problem of tracking multiple objects using a distributed network of sensors. In the pragmatic settings of a limited field of view (FoV) sensors, computing and communication resources of nodes, we develop a novel distributed multi-target algorithm that fuses local multi-object states instead of local multi-object densities. This algorithm uses a novel label consensus approach that reduces label inconsistency, caused by movements of objects from one node's limited FoV to another. To accomplish this, we formalise the concept of label consistency and determine a sufficient condition to achieve it. The proposed algorithm is i) fast and requires significantly less processing time than fusion methods using multi-object filtering densities, and ii) achieves better tracking accuracy by considering tracking errors measured by the Optimal Sub-Pattern Assignment (OSPA) metric over several scans rather than a single scan. Numerical experiments demonstrate the real-time capability of our proposed solution, in computational efficiency and accuracy compared to state-of-the-art solutions in challenging scenarios.
LAVAPilot: Lightweight UAV Trajectory Planner with Situational Awareness for Embedded Autonomy to Track and Locate Radio-tags
Jul 31, 2020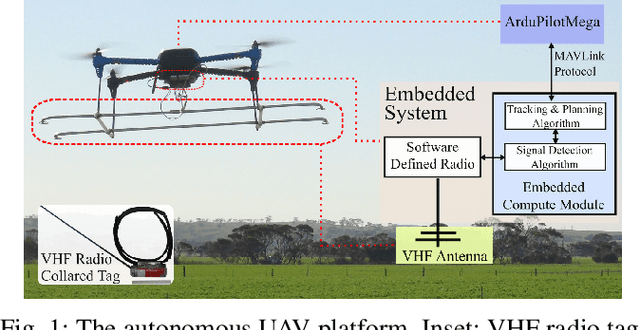
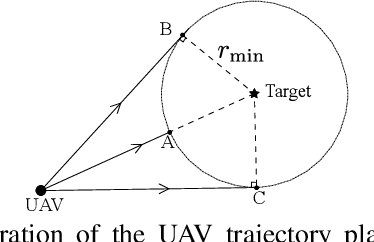
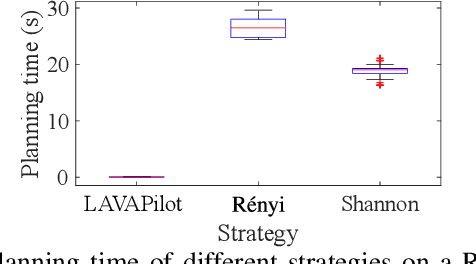
Tracking and locating radio-tagged wildlife is a labor-intensive and time-consuming task necessary in wildlife conservation. In this article, we focus on the problem of achieving embedded autonomy for a resource-limited aerial robot for the task capable of avoiding undesirable disturbances to wildlife. We employ a lightweight sensor system capable of simultaneous (noisy) measurements of radio signal strength information from multiple tags for estimating object locations. We formulate a new lightweight task-based trajectory planning method-LAVAPilot-with a greedy evaluation strategy and a void functional formulation to achieve situational awareness to maintain a safe distance from objects of interest. Conceptually, we embed our intuition of moving closer to reduce the uncertainty of measurements into LAVAPilot instead of employing a computationally intensive information gain based planning strategy. We employ LAVAPilot and the sensor to build a lightweight aerial robot platform with fully embedded autonomy for jointly tracking and planning to track and locate multiple VHF radio collar tags used by conservation biologists. Using extensive Monte Carlo simulation-based experiments, implementations on a single board compute module, and field experiments using an aerial robot platform with multiple VHF radio collar tags, we evaluate our joint planning and tracking algorithms. Further, we compare our method with other information-based planning methods with and without situational awareness to demonstrate the effectiveness of our robot executing LAVAPilot. Our experiments demonstrate that LAVAPilot significantly reduces (by 98.5%) the computational cost of planning to enable real-time planning decisions whilst achieving similar localization accuracy of objects compared to information gain based planning methods, albeit taking a slightly longer time to complete a mission.
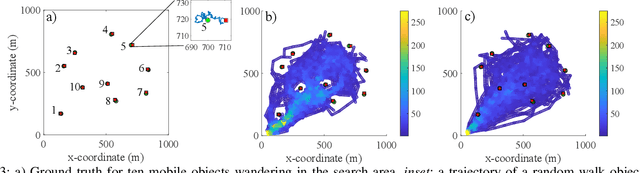
Multi-Objective Multi-Agent Planning for Jointly Discovering and Tracking Mobile Object
Nov 22, 2019



We consider the challenging problem of online planning for a team of agents to autonomously search and track a time-varying number of mobile objects under the practical constraint of detection range limited onboard sensors. A standard POMDP with a value function that either encourages discovery or accurate tracking of mobile objects is inadequate to simultaneously meet the conflicting goals of searching for undiscovered mobile objects whilst keeping track of discovered objects. The planning problem is further complicated by misdetections or false detections of objects caused by range limited sensors and noise inherent to sensor measurements. We formulate a novel multi-objective POMDP based on information theoretic criteria, and an online multi-object tracking filter for the problem. Since controlling multi-agent is a well known combinatorial optimization problem, assigning control actions to agents necessitates a greedy algorithm. We prove that our proposed multi-objective value function is a monotone submodular set function; consequently, the greedy algorithm can achieve a (1-1/e) approximation for maximizing the submodular multi-objective function.