 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication Backbone Reconfiguration with Connectivity Maintenance
Sep 25, 2024



The exchange of information is key in applications that involve multiple agents, such as search and rescue, military operations, and disaster response. In this work, we propose a simple and effective trajectory planning framework that tackles the design, deployment, and reconfiguration of a communication backbone by reframing the problem of networked multi-agent motion planning as a manipulator motion planning problem. Our approach works for backbones of variable configurations both in terms of the number of robots utilized and the distance limit between each robot. While research has been conducted on connection-restricted navigation for multi-robot systems in the last years, the field of manipulators is arguably more developed both in theory and practice. Hence, our methodology facilitates practical applications built on top of widely available motion planning algorithms and frameworks for manipulators.
Updating Robot Safety Representations Online from Natural Language Feedback
Sep 22, 2024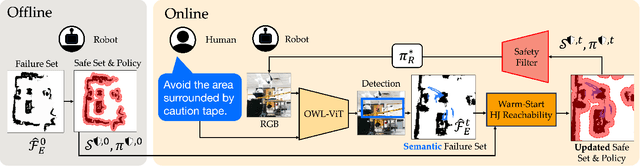
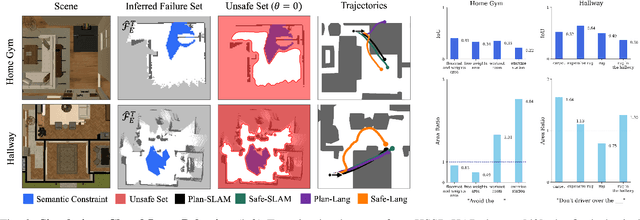
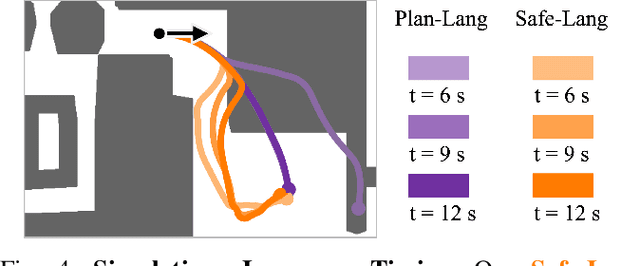
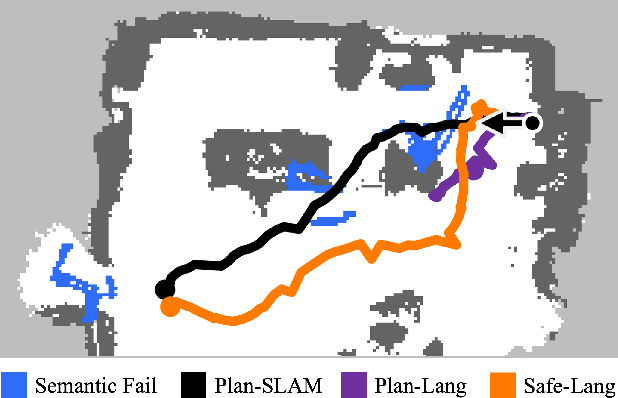
Robots must operate safely when deployed in novel and human-centered environments, like homes. Current safe control approaches typically assume that the safety constraints are known a priori, and thus, the robot can pre-compute a corresponding safety controller. While this may make sense for some safety constraints (e.g., avoiding collision with walls by analyzing a floor plan), other constraints are more complex (e.g., spills), inherently personal, context-dependent, and can only be identified at deployment time when the robot is interacting in a specific environment and with a specific person (e.g., fragile objects, expensive rugs). Here, language provides a flexible mechanism to communicate these evolving safety constraints to the robot. In this work, we use vision language models (VLMs) to interpret language feedback and the robot's image observations to continuously update the robot's representation of safety constraints. With these inferred constraints, we update a Hamilton-Jacobi reachability safety controller online via efficient warm-starting techniques. Through simulation and hardware experiments, we demonstrate the robot's ability to infer and respect language-based safety constraints with the proposed approach.
$\textit{UniSaT}$: Unified-Objective Belief Model and Planner to Search for and Track Multiple Objects
May 25, 2024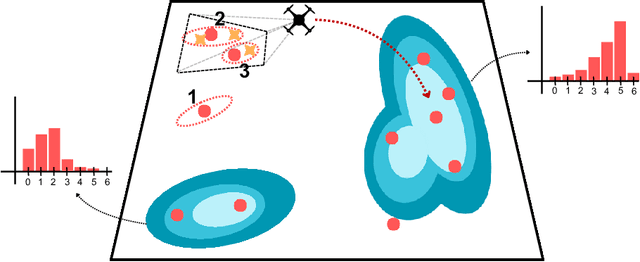
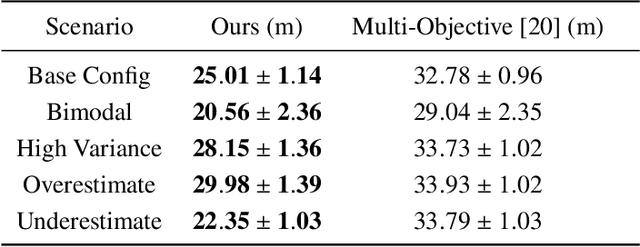
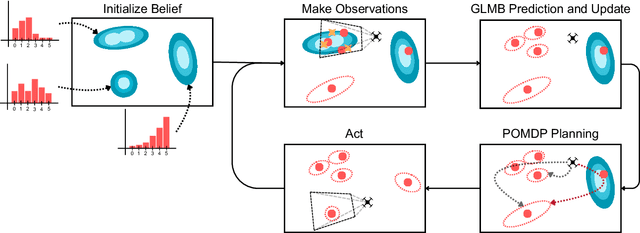
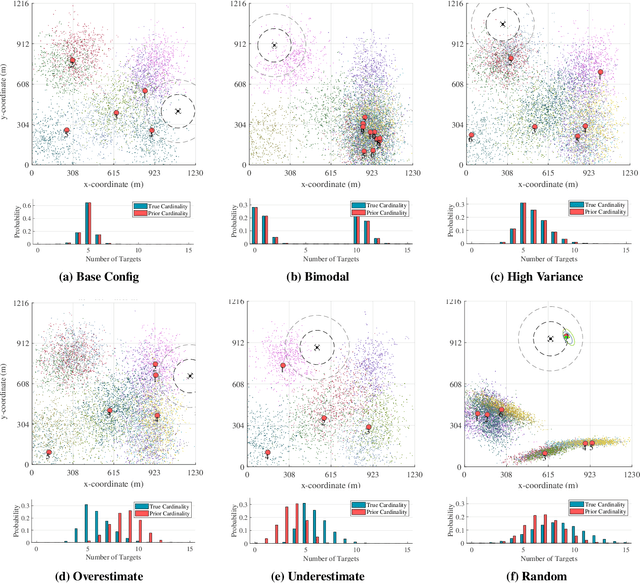
The problem of path planning for autonomously searching and tracking multiple objects is important to reconnaissance, surveillance, and many other data-gathering applications. Due to the inherent competing objectives of searching for new objects while maintaining tracks for found objects, most current approaches rely on multi-objective planning methods, leaving it up to the user to tune parameters to balance between the two objectives, usually based on heuristics or trial and error. In this paper, we introduce $\textit{UniSaT}$ ($\textit{Unified Search and Track}$), a unified-objective formulation for the search and track problem based on Random Finite Sets (RFS). This is done by modeling both the unknown and known objects through a combined generalized labeled multi-Bernoulli (GLMB) filter. For the unseen objects, we can leverage both cardinality and spatial prior distributions, which means $\textit{UniSaT}$ does not rely on knowing the exact count of the expected number of objects in the space. The planner maximizes the mutual information of this unified belief model, creating balanced search and tracking behaviors. We demonstrate our work in a simulated environment and show both qualitative results as well as quantitative improvements over a multi-objective method.