 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Computation of Distance Functions for Navigation Vector Fields in Lie Groups
Jun 03, 2026Vector-field-based methods are widely used for robot control and are often applied to the path-tracking problem. Some vector field approaches require repeatedly computing the distance between the robot configuration and the curve, as well as the corresponding closest point. Recently, vector fields have been extended to Lie Groups. In this case, this computation can be expensive, especially when performed at high control frequencies on embedded platforms. This paper proposes a method for efficiently computing the distance between a point and a curve represented as what is called a G-polynomial curve, which is a curve representation that generalizes polynomial curves to matrix Lie groups. The proposed approach exploits the structure of these curves to reduce the problem to a small number of polynomial root-finding computations. Simulation results show that the method significantly reduces computation time while maintaining accuracy compared to existing optimization-based approaches. Practical formulas are also provided for the case of the group SE(3), and the method is validated experimentally on a robotic manipulator. The methodology is implemented in a computational package, available online.
Can LLM Agents Solve Collaborative Tasks? A Study on Urgency-Aware Planning and Coordination
Aug 20, 2025The ability to coordinate actions across multiple agents is critical for solving complex, real-world problems. Large Language Models (LLMs) have shown strong capabilities in communication, planning, and reasoning, raising the question of whether they can also support effective collaboration in multi-agent settings. In this work, we investigate the use of LLM agents to solve a structured victim rescue task that requires division of labor, prioritization, and cooperative planning. Agents operate in a fully known graph-based environment and must allocate resources to victims with varying needs and urgency levels. We systematically evaluate their performance using a suite of coordination-sensitive metrics, including task success rate, redundant actions, room conflicts, and urgency-weighted efficiency. This study offers new insights into the strengths and failure modes of LLMs in physically grounded multi-agent collaboration tasks, contributing to future benchmarks and architectural improvements.
Communication Backbone Reconfiguration with Connectivity Maintenance
Sep 25, 2024



The exchange of information is key in applications that involve multiple agents, such as search and rescue, military operations, and disaster response. In this work, we propose a simple and effective trajectory planning framework that tackles the design, deployment, and reconfiguration of a communication backbone by reframing the problem of networked multi-agent motion planning as a manipulator motion planning problem. Our approach works for backbones of variable configurations both in terms of the number of robots utilized and the distance limit between each robot. While research has been conducted on connection-restricted navigation for multi-robot systems in the last years, the field of manipulators is arguably more developed both in theory and practice. Hence, our methodology facilitates practical applications built on top of widely available motion planning algorithms and frameworks for manipulators.
A Semi-Lagrangian Approach for Time and Energy Path Planning Optimization in Static Flow Fields
Mar 25, 2024



Efficient path planning for autonomous mobile robots is a critical problem across numerous domains, where optimizing both time and energy consumption is paramount. This paper introduces a novel methodology that considers the dynamic influence of an environmental flow field and considers geometric constraints, including obstacles and forbidden zones, enriching the complexity of the planning problem. We formulate it as a multi-objective optimal control problem, propose a novel transformation called Harmonic Transformation, and apply a semi-Lagrangian scheme to solve it. The set of Pareto efficient solutions is obtained considering two distinct approaches: a deterministic method and an evolutionary-based one, both of which are designed to make use of the proposed Harmonic Transformation. Through an extensive analysis of these approaches, we demonstrate their efficacy in finding optimized paths.
Clustered Orienteering Problem with Subgroups
Dec 27, 2023This paper introduces an extension to the Orienteering Problem (OP), called Clustered Orienteering Problem with Subgroups (COPS). In this variant, nodes are arranged into subgroups, and the subgroups are organized into clusters. A reward is associated with each subgroup and is gained only if all of its nodes are visited; however, at most one subgroup can be visited per cluster. The objective is to maximize the total collected reward while attaining a travel budget. We show that our new formulation has the ability to model and solve two previous well-known variants, the Clustered Orienteering Problem (COP) and the Set Orienteering Problem (SOP), in addition to other scenarios introduced here. An Integer Linear Programming (ILP) formulation and a Tabu Search-based heuristic are proposed to solve the problem. Experimental results indicate that the ILP method can yield optimal solutions at the cost of time, whereas the metaheuristic produces comparable solutions within a more reasonable computational cost.
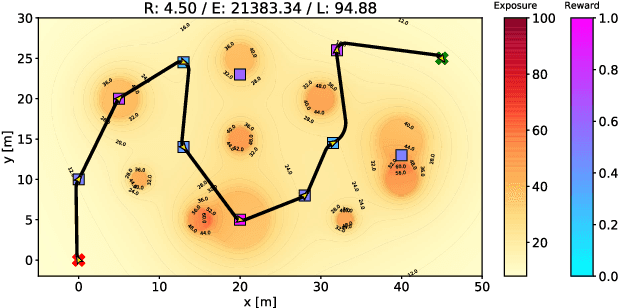
A Semi-Lagrangian Approach for the Minimal Exposure Path Problem in Wireless Sensor Networks
Aug 12, 2021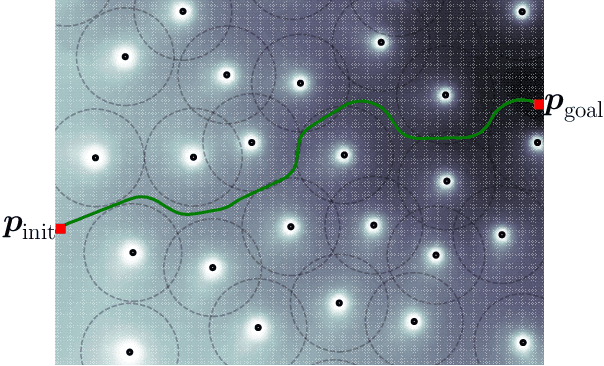
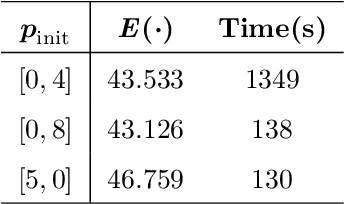
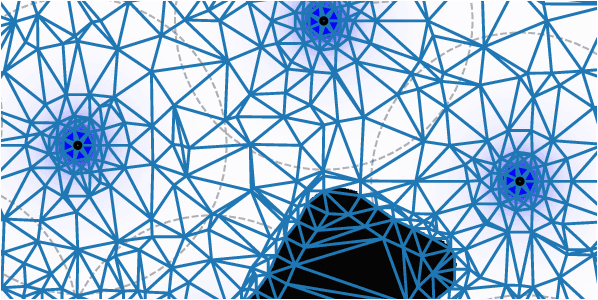
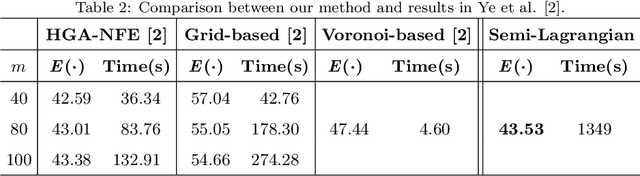
A critical metric of the coverage quality in Wireless Sensor Networks (WSNs) is the Minimal Exposure Path (MEP), a path through the environment that least exposes an intruder to the sensor detecting nodes. Many approaches have been proposed in the last decades to solve this optimization problem, ranging from classic (grid-based and Voronoi-based) planners to genetic meta-heuristics. However, most of them are limited to specific sensing models and obstacle-free spaces. Still, none of them guarantee an optimal solution, and the state-of-the-art is expensive in terms of run-time. Therefore, in this paper, we propose a novel method that models the MEP as an Optimal Control problem and solves it by using a Semi-Lagrangian approach. This framework is shown to converge to the optimal MEP while also incorporates different homogeneous and heterogeneous sensor models and geometric constraints (obstacles). Experiments show that our method dominates the state-of-the-art, improving the results by approximately 10% with a relatively lower execution time.
Minimal Exposure Dubins Orienteering Problem
Oct 22, 2020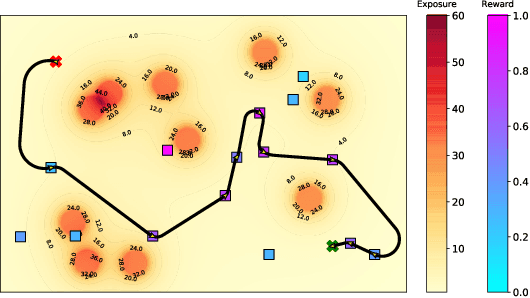
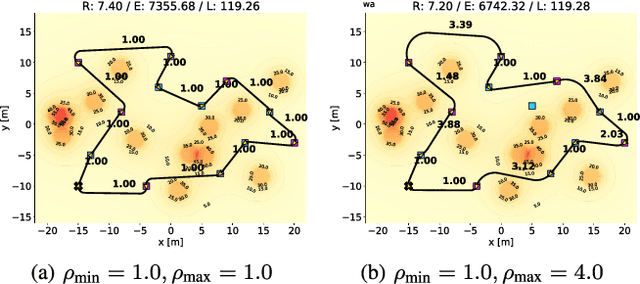
Different applications, such as environmental monitoring and military operations, demand the observation of predefined target locations, and an autonomous mobile robot can assist in these tasks. In this context, the Orienteering Problem (OP) is a well-known routing problem, in which the goal is to maximize the objective function by visiting the most rewarding locations, however, respecting a limited travel budget (e.g., length, time, energy). However, traditional formulations for routing problems generally neglect some environment peculiarities, such as obstacles or threatening zones. In this paper, we tackle the OP considering Dubins vehicles in the presence of a known deployed sensor field. We propose a novel multi-objective formulation called Minimal Exposure Dubins Orienteering Problem (MEDOP), whose main objectives are: (i) maximize the collected reward, and (ii) minimize the exposure of the agent, i.e., the probability of being detected. The solution is based on an evolutionary algorithm that iteratively varies the subset and sequence of locations to be visited, the orientations on each location, and the turning radius used to determine the paths. Results show that our approach can efficiently find a diverse set of solutions that simultaneously optimize both objectives.