 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimal Exposure Dubins Orienteering Problem
Paper and Code
Oct 22, 2020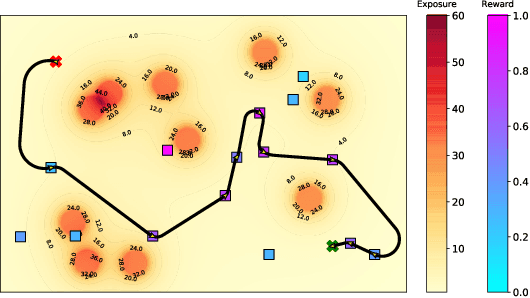
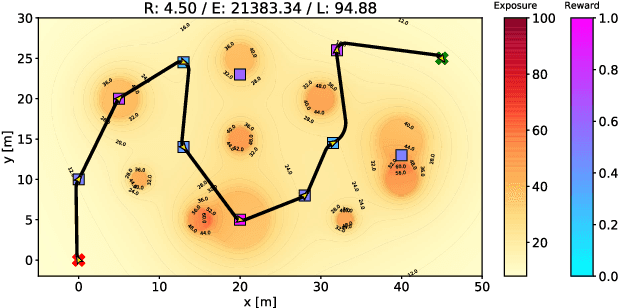
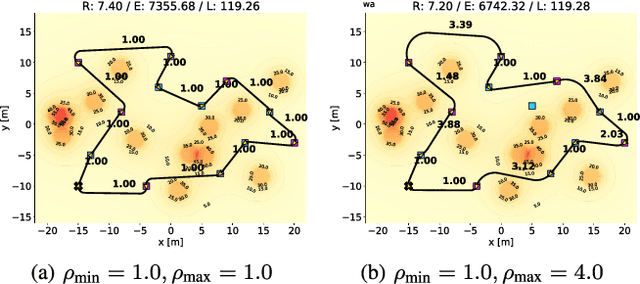
Different applications, such as environmental monitoring and military operations, demand the observation of predefined target locations, and an autonomous mobile robot can assist in these tasks. In this context, the Orienteering Problem (OP) is a well-known routing problem, in which the goal is to maximize the objective function by visiting the most rewarding locations, however, respecting a limited travel budget (e.g., length, time, energy). However, traditional formulations for routing problems generally neglect some environment peculiarities, such as obstacles or threatening zones. In this paper, we tackle the OP considering Dubins vehicles in the presence of a known deployed sensor field. We propose a novel multi-objective formulation called Minimal Exposure Dubins Orienteering Problem (MEDOP), whose main objectives are: (i) maximize the collected reward, and (ii) minimize the exposure of the agent, i.e., the probability of being detected. The solution is based on an evolutionary algorithm that iteratively varies the subset and sequence of locations to be visited, the orientations on each location, and the turning radius used to determine the paths. Results show that our approach can efficiently find a diverse set of solutions that simultaneously optimize both objectives.