 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Mean of Multi-Object Trajectories
Apr 29, 2025



This paper introduces the concept of a mean for trajectories and multi-object trajectories--sets or multi-sets of trajectories--along with algorithms for computing them. Specifically, we use the Fr\'{e}chet mean, and metrics based on the optimal sub-pattern assignment (OSPA) construct, to extend the notion of average from vectors to trajectories and multi-object trajectories. Further, we develop efficient algorithms to compute these means using greedy search and Gibbs sampling. Using distributed multi-object tracking as an application, we demonstrate that the Fr\'{e}chet mean approach to multi-object trajectory consensus significantly outperforms state-of-the-art distributed multi-object tracking methods.
A Bayesian 3D Multi-view Multi-object Tracking Filter
Jan 13, 2020
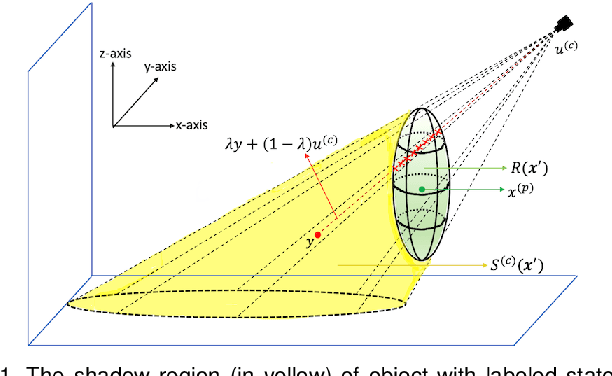
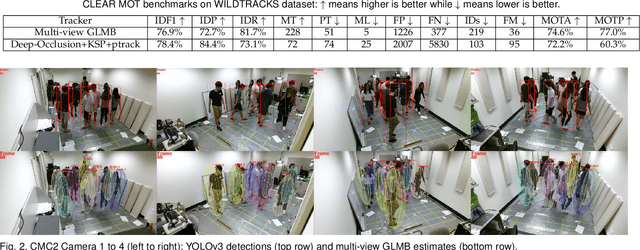
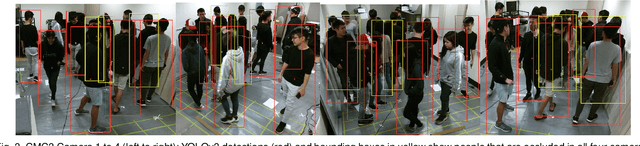
This paper proposes an online multi-camera multi-object tracker that only requires monocular detector training, independent of the multi-camera configurations, allowing seamless extension/deletion of cameras without (retraining) effort. The proposed algorithm has a linear complexity in the total number of detections across the cameras, and hence scales gracefully with the number of cameras. It operates in 3D world frame, and provides 3D trajectory estimates of the objects. The key innovation is a high fidelity yet tractable 3D occlusion model, amenable to optimal Bayesian multi-view multi-object filtering, which seamlessly integrates, into a single Bayesian recursion, the sub-tasks of track management, state estimation, clutter rejection, and occlusion/misdetection handling. The proposed algorithm is evaluated on the latest WILDTRACKS dataset, and demonstrated to work in very crowded scenes on a new dataset.
Multi-Target Tracking with Time-Varying Clutter Rate and Detection Profile: Application to Time-lapse Cell Microscopy Sequences
Jul 23, 2015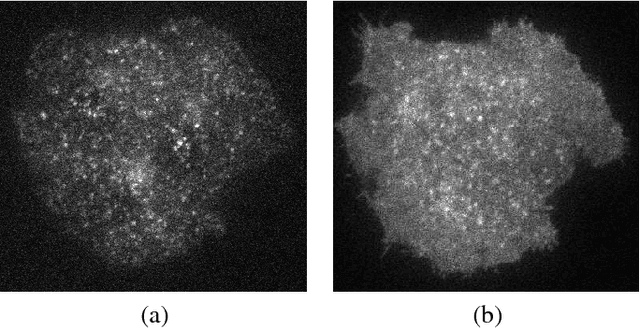
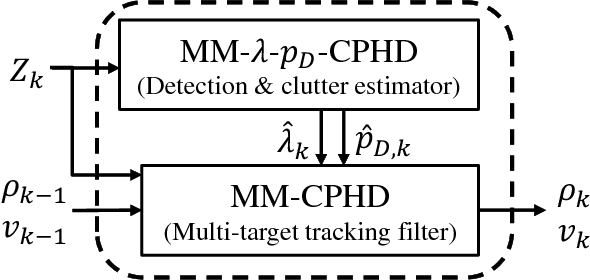
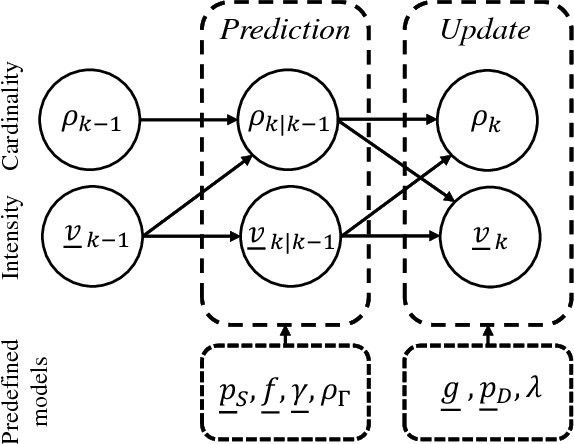
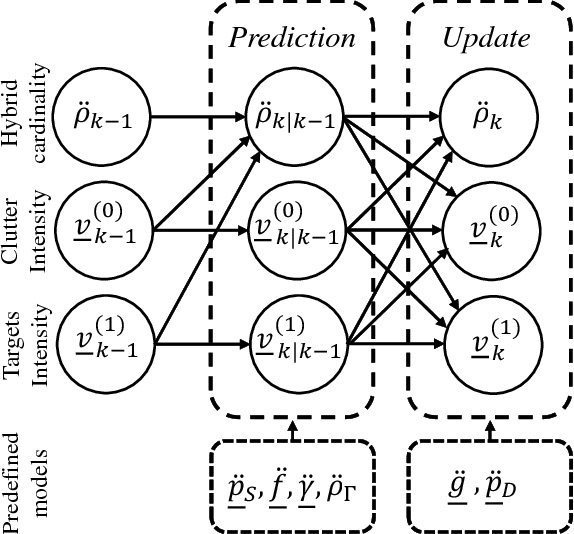
Quantitative analysis of the dynamics of tiny cellular and sub-cellular structures, known as particles, in time-lapse cell microscopy sequences requires the development of a reliable multi-target tracking method capable of tracking numerous similar targets in the presence of high levels of noise, high target density, complex motion patterns and intricate interactions. In this paper, we propose a framework for tracking these structures based on the random finite set Bayesian filtering framework. We focus on challenging biological applications where image characteristics such as noise and background intensity change during the acquisition process. Under these conditions, detection methods usually fail to detect all particles and are often followed by missed detections and many spurious measurements with unknown and time-varying rates. To deal with this, we propose a bootstrap filter composed of an estimator and a tracker. The estimator adaptively estimates the required meta parameters for the tracker such as clutter rate and the detection probability of the targets, while the tracker estimates the state of the targets. Our results show that the proposed approach can outperform state-of-the-art particle trackers on both synthetic and real data in this regime.