 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multi-Object Tracking Under Limited Field of View Heterogeneous Sensors with Density Clustering
Dec 31, 2023



We consider the problem of tracking multiple, unknown, and time-varying numbers of objects using a distributed network of heterogeneous sensors. In an effort to derive a formulation for practical settings, we consider limited and unknown sensor field-of-views (FoVs), sensors with limited local computational resources and communication channel capacity. The resulting distributed multi-object tracking algorithm involves solving an NP-hard multidimensional assignment problem either optimally for small-size problems or sub-optimally for general practical problems. For general problems, we propose an efficient distributed multi-object tracking algorithm that performs track-to-track fusion using a clustering-based analysis of the state space transformed into a density space to mitigate the complexity of the assignment problem. The proposed algorithm can more efficiently group local track estimates for fusion than existing approaches. To ensure we achieve globally consistent identities for tracks across a network of nodes as objects move between FoVs, we develop a graph-based algorithm to achieve label consensus and minimise track segmentation. Numerical experiments with a synthetic and a real-world trajectory dataset demonstrate that our proposed method is significantly more computationally efficient than state-of-the-art solutions, achieving similar tracking accuracy and bandwidth requirements but with improved label consistency.
Estimation of Scalar Field Distribution in the Fourier Domain
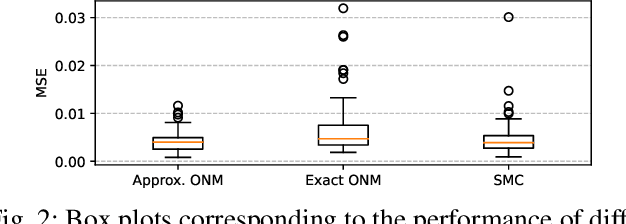
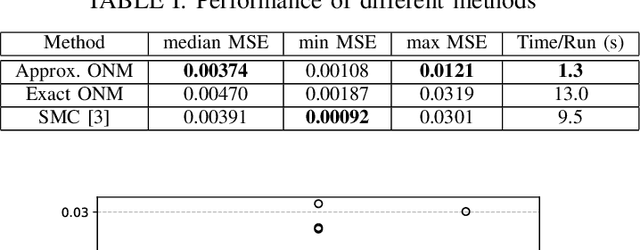
Mar 28, 2023In this paper we consider the problem of estimation of scalar field distribution collected from noisy measurements. The field is modelled as a sum of Fourier components/modes, where the number of modes retained and estimated determines in a natural way the approximation quality. An algorithm for estimating the modes using an online optimization approach is presented, under the assumption that the noisy measurements are quantized. The algorithm can estimate time-varying fields through the introduction of a forgetting factor. Simulation studies demonstrate the effectiveness of the proposed approach.
A Logistic Regression Approach to Field Estimation Using Binary Measurements
Jun 01, 2022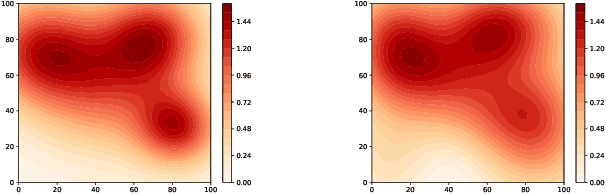

In this letter, we consider the problem of field estimation using binary measurements. Previous work has formulated the problem as a parameter estimation problem, with the parameter estimation carried out in an online manner using sequential Monte Carlo techniques. In the current work, we consider an alternative approach to the parameter estimation based on online logistic regression. The developed algorithm is less computationally intensive than the sequential Monte Carlo approach, while having more reliable estimation performance.
Stability Enforced Bandit Algorithms for Channel Selection in Remote State Estimation
May 20, 2022

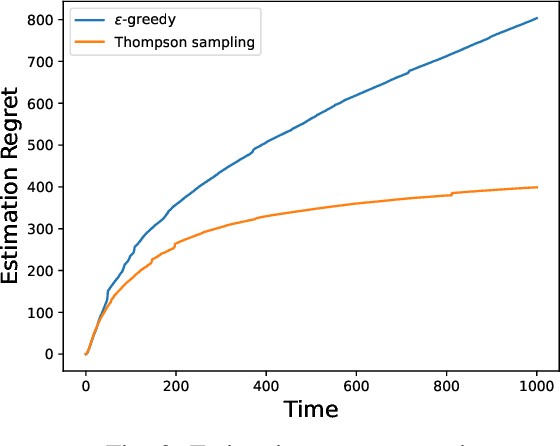
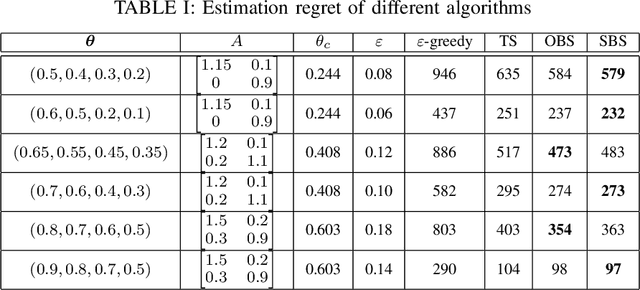
In this paper we consider a remote state estimation problem where a sensor can, at each discrete time instant, transmit on one out of M different communication channels. A key difficulty of the situation at hand is that the channel statistics are unknown. We study the case where both learning of the channel reception probabilities and state estimation is carried out simultaneously. Methods for choosing the channels based on techniques for multi-armed bandits are presented, and shown to provide stability of the remote estimator. Furthermore, we define the performance notion of estimation regret, and derive bounds on how it scales with time for the considered algorithms.
Safe Learning of Linear Time-Invariant Systems
Nov 01, 2021We consider safety in simultaneous learning and control of discrete-time linear time-invariant systems. We provide rigorous confidence bounds on the learned model of the system based on the number of utilized state measurements. These bounds are used to modify control inputs to the system via an optimization problem with potentially time-varying safety constraints. We prove that the state can only exit the safe set with small probability, provided a feasible solution to the safety-constrained optimization exists. This optimization problem is then reformulated in a more computationally-friendly format by tightening the safety constraints to account for model uncertainty during learning. The tightening decreases as the confidence in the learned model improves. We finally prove that, under persistence of excitation, the tightening becomes negligible as more measurements are gathered.