 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Bearing Estimation Using Set Membership Methods
Apr 17, 2023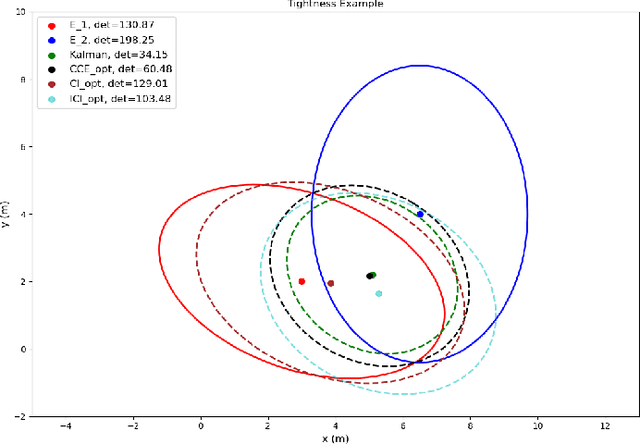
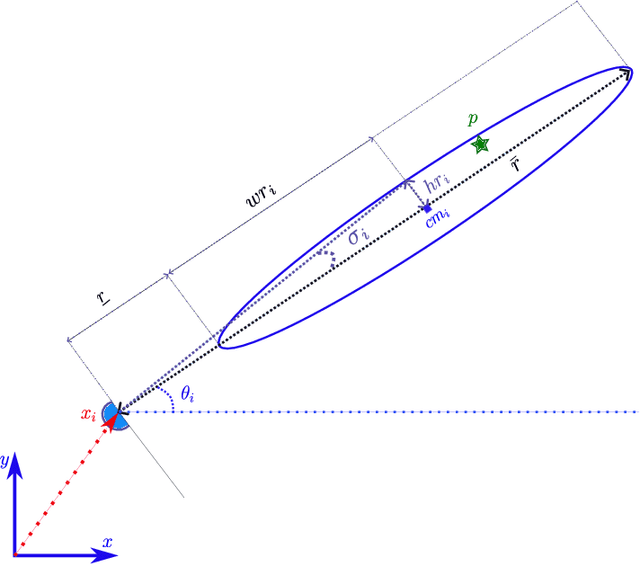

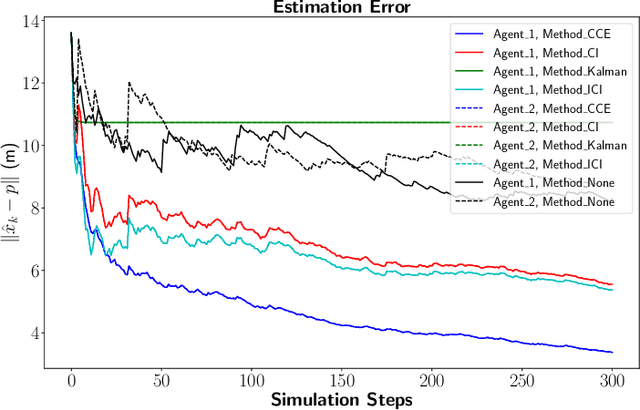
We consider the problem of collaborative bearing estimation using a method with historic roots in set theoretic estimation techniques. We refer to this method as the Convex Combination Ellipsoid (CCE) method and show that it provides a less conservative covariance estimate than the well known Covariance Intersection (CI) method. The CCE method does not introduce additional uncertainty that was not already present in the prior estimates. Using our proposed approach for collaborative bearing estimation, the nonlinearity of the bearing measurement is captured as an uncertainty ellipsoid thereby avoiding the need for linearization or approximation via sampling procedures. Simulations are undertaken to evaluate the relative performance of the collaborative bearing estimation solution using the proposed (CCE) and typical (CI) methods.
A Logistic Regression Approach to Field Estimation Using Binary Measurements
Jun 01, 2022
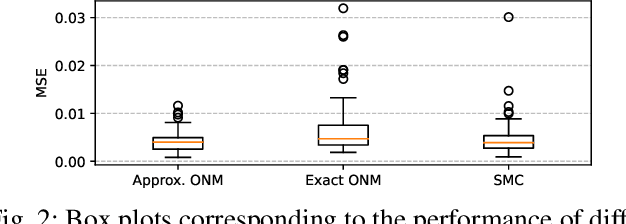

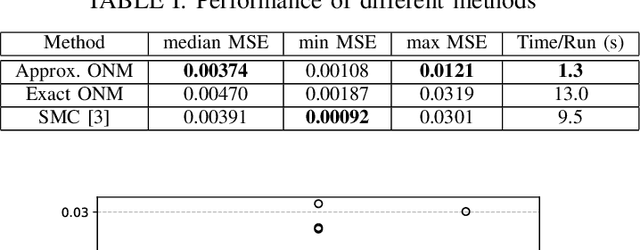
In this letter, we consider the problem of field estimation using binary measurements. Previous work has formulated the problem as a parameter estimation problem, with the parameter estimation carried out in an online manner using sequential Monte Carlo techniques. In the current work, we consider an alternative approach to the parameter estimation based on online logistic regression. The developed algorithm is less computationally intensive than the sequential Monte Carlo approach, while having more reliable estimation performance.
Safe Learning of Linear Time-Invariant Systems
Nov 01, 2021We consider safety in simultaneous learning and control of discrete-time linear time-invariant systems. We provide rigorous confidence bounds on the learned model of the system based on the number of utilized state measurements. These bounds are used to modify control inputs to the system via an optimization problem with potentially time-varying safety constraints. We prove that the state can only exit the safe set with small probability, provided a feasible solution to the safety-constrained optimization exists. This optimization problem is then reformulated in a more computationally-friendly format by tightening the safety constraints to account for model uncertainty during learning. The tightening decreases as the confidence in the learned model improves. We finally prove that, under persistence of excitation, the tightening becomes negligible as more measurements are gathered.
An expressiveness hierarchy of Behavior Trees and related architectures
Apr 16, 2021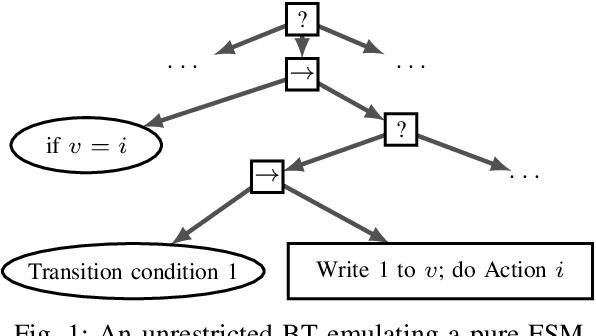
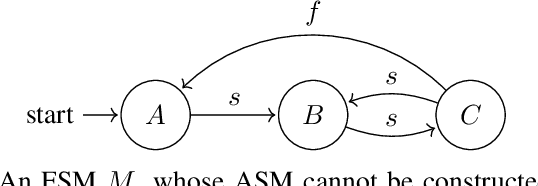
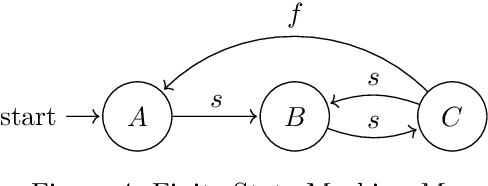
In this paper we provide a formal framework for comparing the expressive power of Behavior Trees (BTs) to other action selection architectures. Taking inspiration from the analogous comparisons of structural programming methodologies, we formalise the concept of `expressiveness'. This leads us to an expressiveness hierarchy of control architectures, which includes BTs, Decision Trees (DTs), Teleo-reactive Programs (TRs) and Finite State Machines (FSMs). By distinguishing between BTs with auxiliary variables and those without, we demonstrate the existence of a trade-off in BT design between readability and expressiveness. We discuss what this means for BTs in practice.
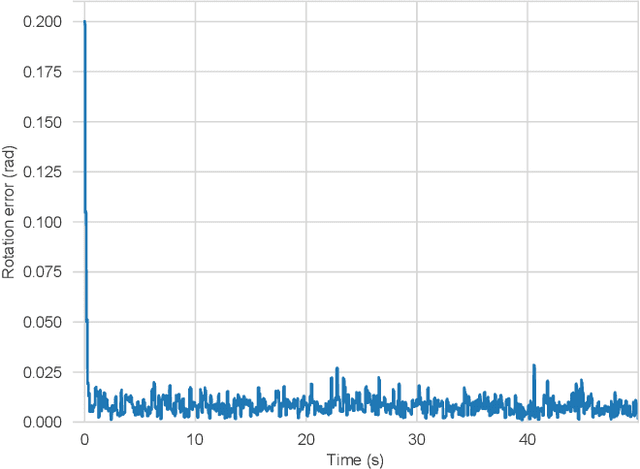
Inertial Collaborative Localisation for Autonomous Vehicles using a Minimum Energy Filter
Apr 13, 2021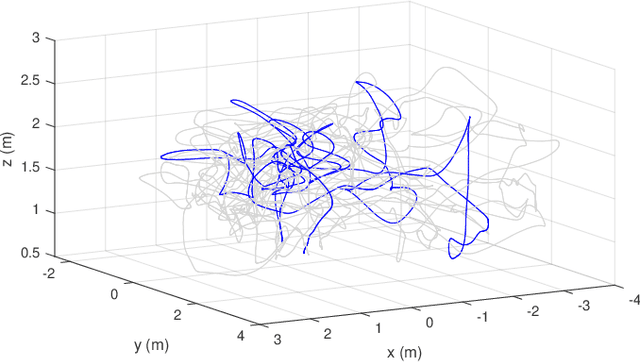
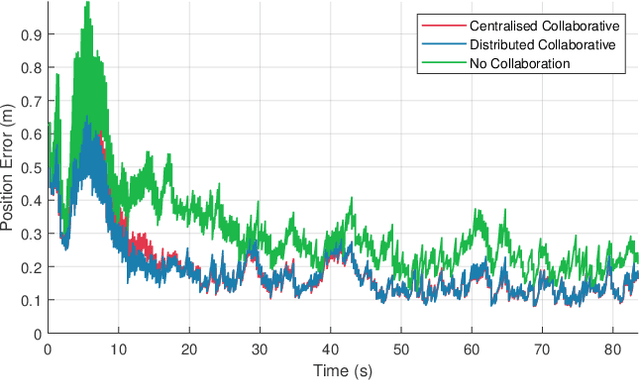
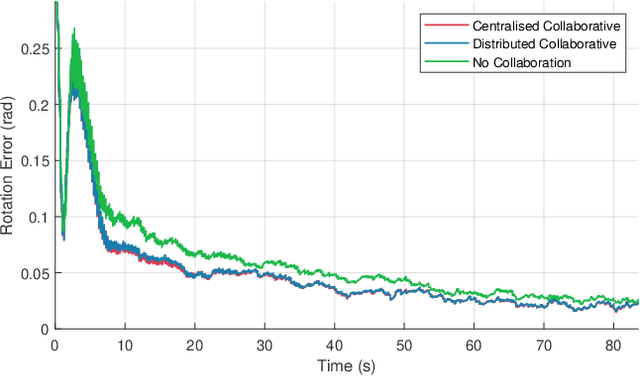
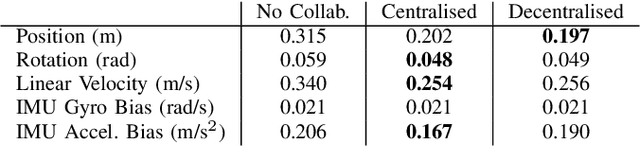
Collaborative Localisation has been studied extensively in recent years as a way to improve pose estimation of unmanned aerial vehicles in challenging environments. However little attention has been paid toward advancing the underlying filter design beyond standard Extended Kalman Filter-based approaches. In this paper, we detail a discrete-time collaborative localisation filter using the deterministic minimum-energy framework. The filter incorporates measurements from an inertial measurement unit and models the effects of sensor bias and gravitational acceleration. We present a simulation based on real-world vehicle trajectories and IMU data that demonstrates how collaborative localisation can improve performance over single-vehicle methods.
Safe Learning of Uncertain Environments for Nonlinear Control-Affine Systems
Mar 02, 2021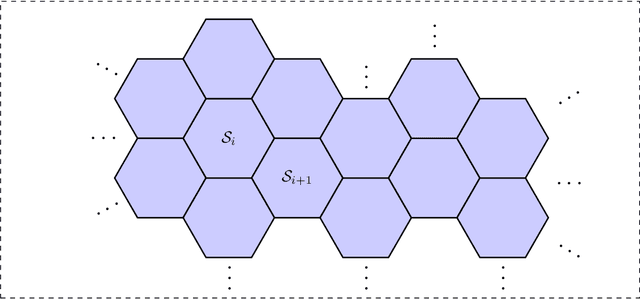
In many learning based control methodologies, learning the unknown dynamic model precedes the control phase, while the aim is to control the system such that it remains in some safe region of the state space. In this work our aim is to guarantee safety while learning and control proceed simultaneously. Specifically, we consider the problem of safe learning in nonlinear control-affine systems subject to unknown additive uncertainty. We model uncertainty as a Gaussian signal and use state measurements to learn its mean and covariance. We provide rigorous time-varying bounds on the mean and covariance of the uncertainty and employ them to modify the control input via an optimisation program with safety constraints encoded as a barrier function on the state space. We show that with an arbitrarily large probability we can guarantee that the state will remain in the safe set, while learning and control are carried out simultaneously, provided that a feasible solution exists for the optimisation problem. We provide a secondary formulation of this optimisation that is computationally more efficient. This is based on tightening the safety constraints to counter the uncertainty about the learned mean and covariance. The magnitude of the tightening can be decreased as our confidence in the learned mean and covariance increases (i.e., as we gather more measurements about the environment). Extensions of the method are provided for Gaussian uncertainties with piecewise constant mean and covariance to accommodate more general environments.
A Minimum Energy Filter for Localisation of an Unmanned Aerial Vehicle
Sep 10, 2020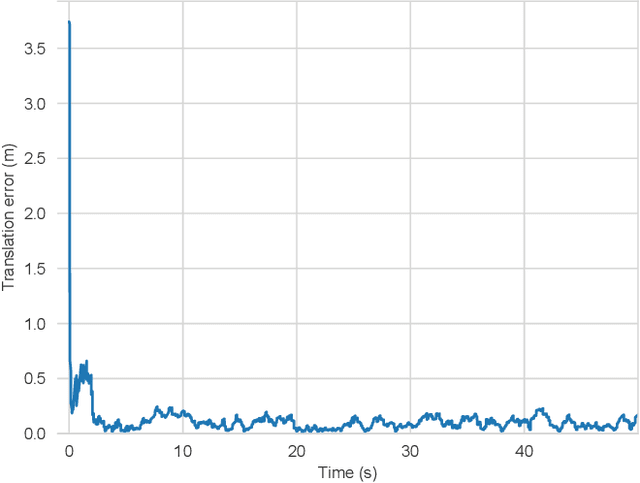
Accurate localisation of unmanned aerial vehicles is vital for the next generation of automation tasks. This paper proposes a minimum energy filter for velocity-aided pose estimation on the extended special Euclidean group. The approach taken exploits the Lie-group symmetry of the problem to combine Inertial Measurement Unit (IMU) sensor output with landmark measurements into a robust and high performance state estimate. We propose an asynchronous discrete-time implementation to fuse high bandwidth IMU with low bandwidth discrete-time landmark measurements typical of real-world scenarios. The filter's performance is demonstrated by simulation.
On modularity in reactive control architectures, with an application to formal verification
Aug 28, 2020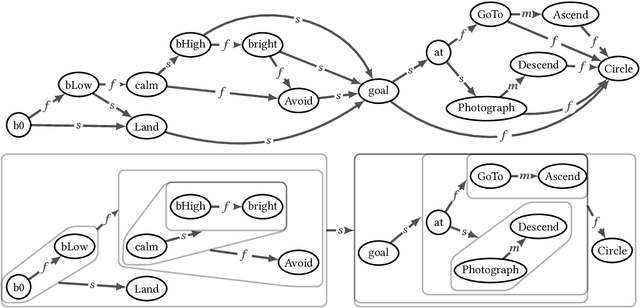
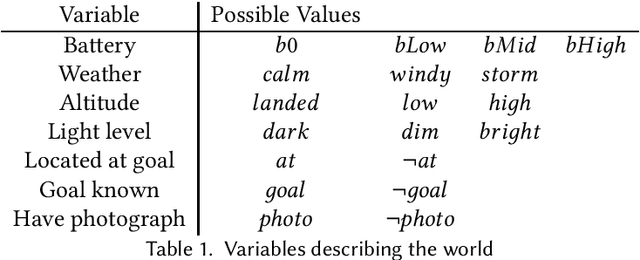
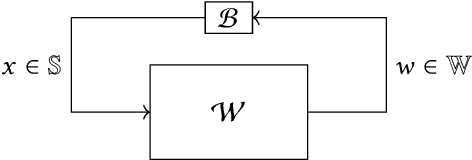
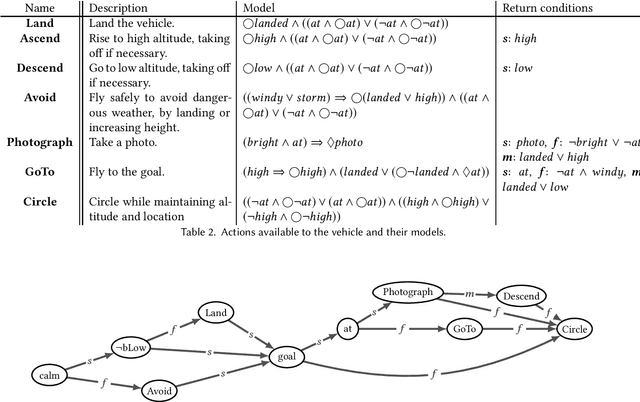
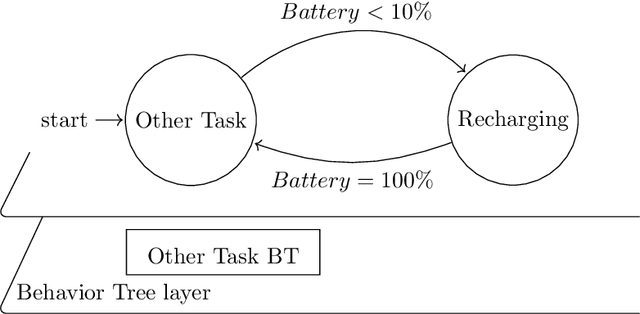
Modularity is a central principle throughout the design process for cyber-physical systems. Modularity reduces complexity and increases reuse of behavior. In this paper we pose and answer the following question: how can we identify independent `modules' within the structure of reactive control architectures? To this end, we propose a graph-structured control architecture we call a decision structure, and show how it generalises some reactive control architectures which are popular in Artificial Intelligence (AI) and robotics, specifically Teleo-Reactive programs (TRs), Decision Trees (DTs), Behavior Trees (BTs) and Generalised Behavior Trees ($k$-BTs). Inspired by the definition of a module in graph theory, we define modules in decision structures and show how each decision structure possesses a canonical decomposition into its modules. We can naturally characterise each of the BTs, $k$-BTs, DTs and TRs by properties of their module decomposition. This allows us to recognise which decision structures are equivalent to each of these architectures in quadratic time. Our proposed concept of modules extends to formal verification, under any verification scheme capable of verifying a decision structure. Namely, we prove that a modification to a module within a decision structure has no greater flow-on effects than a modification to an individual action within that structure. This enables verification on modules to be done locally and hierarchically, where structures can be verified and then repeatedly locally modified, with modules replaced by modules while preserving correctness. To illustrate the findings, we present an example of a solar-powered drone controlled by a decision structure. We use a Linear Temporal Logic-based verification scheme to verify the correctness of this structure, and then show how one can modify modules while preserving its correctness.
A principled analysis of Behavior Trees and their generalisations
Aug 27, 2020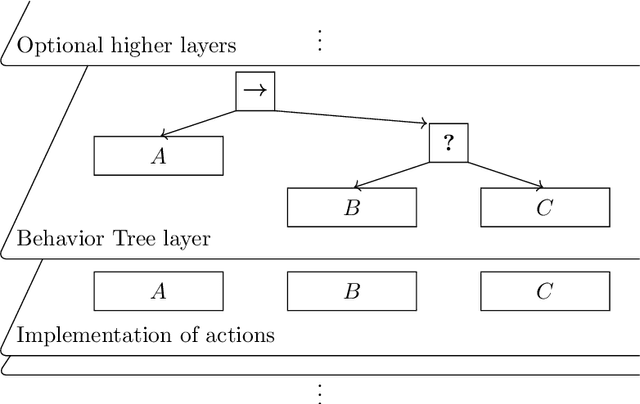
As complex autonomous robotic systems become more widespread, the goals of transparent and reusable Artificial Intelligence (AI) become more important. In this paper we analyse how the principles behind Behavior Trees (BTs), an increasingly popular tree-structured control architecture, are applicable to these goals. Using structured programming as a guide, we analyse the BT principles of reactiveness and modularity in a formal framework of action selection. Proceeding from these principles, we review a number of challenging use-cases of BTs in the literature, and show that reasoning via these principles leads to compatible solutions. Extending these arguments, we introduce a new class of control architectures we call generalised BTs or $k$-BTs and show how they can extend the applicability of BTs to some of the aforementioned challenging BT use-cases while preserving the BT principles. We compare BTs to a number of other control architectures within this framework, and show which forms of decision-making can and cannot be equivalently represented by BTs. This allows us to construct a hierarchy of architectures and to show how BTs fit into such a hierarchy.
A Minimum Energy Filter for Distributed Multirobot Localisation
May 15, 2020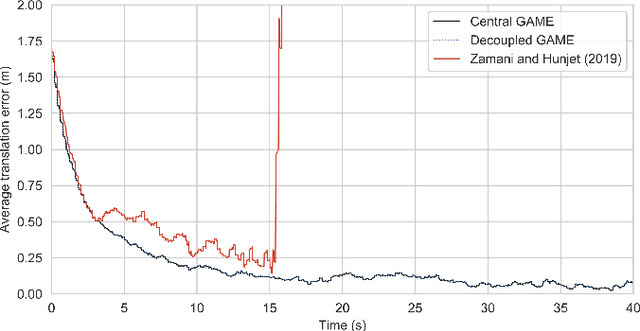

We present a new approach to the cooperative localisation problem by applying the theory of minimum energy filtering. We consider the problem of estimating the pose of a group of mobile robots in an environment where robots can perceive fixed landmarks and neighbouring robots as well as share information with others over a communication channel. Whereas the vast majority of the existing literature applies some variant of a Kalman Filter, we derive a set of filter equations for the global state estimate based on the principle of minimum energy filtering. We show how the filter equations can be decoupled and the calculations distributed among the robots in the network without requiring a central processing node. Finally, we provide a demonstration of the filter's performance in simulation.