 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Minimum Energy Filter for Distributed Multirobot Localisation
Paper and Code
May 15, 2020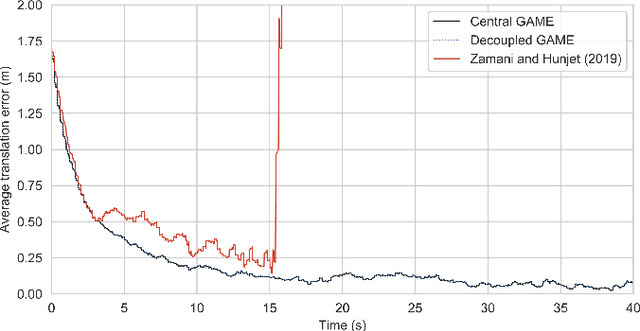

We present a new approach to the cooperative localisation problem by applying the theory of minimum energy filtering. We consider the problem of estimating the pose of a group of mobile robots in an environment where robots can perceive fixed landmarks and neighbouring robots as well as share information with others over a communication channel. Whereas the vast majority of the existing literature applies some variant of a Kalman Filter, we derive a set of filter equations for the global state estimate based on the principle of minimum energy filtering. We show how the filter equations can be decoupled and the calculations distributed among the robots in the network without requiring a central processing node. Finally, we provide a demonstration of the filter's performance in simulation.