 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Robot and Landmark Localisation Using Relative Bearing Measurements
Jul 24, 2025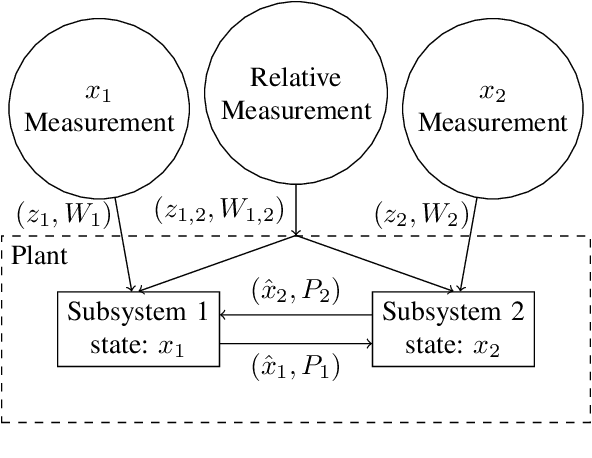
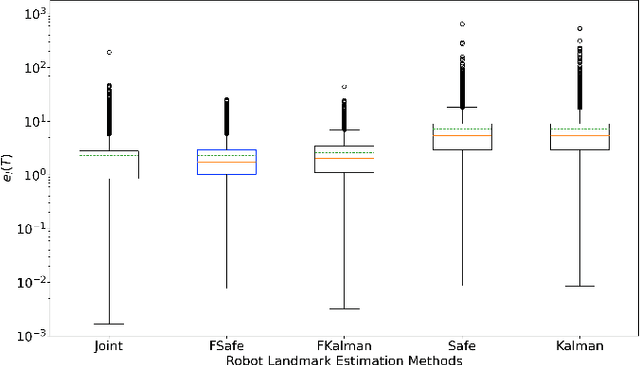
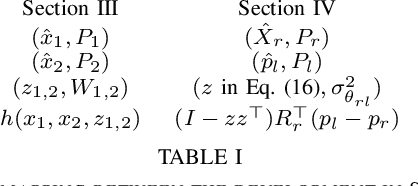
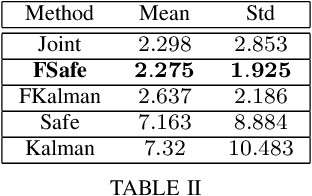
In this paper we propose a modular nonlinear least squares filtering approach for systems composed of independent subsystems. The state and error covariance estimate of each subsystem is updated independently, even when a relative measurement simultaneously depends on the states of multiple subsystems. We integrate the Covariance Intersection (CI) algorithm as part of our solution in order to prevent double counting of information when subsystems share estimates with each other. An alternative derivation of the CI algorithm based on least squares estimation makes this integration possible. We particularise the proposed approach to the robot-landmark localization problem. In this problem, noisy measurements of the bearing angle to a stationary landmark position measured relative to the SE(2) pose of a moving robot couple the estimation problems for the robot pose and the landmark position. In a randomized simulation study, we benchmark the proposed modular method against a monolithic joint state filter to elucidate their respective trade-offs. In this study we also include variants of the proposed method that achieve a graceful degradation of performance with reduced communication and bandwidth requirements.
Collaborative Bearing Estimation Using Set Membership Methods
Apr 17, 2023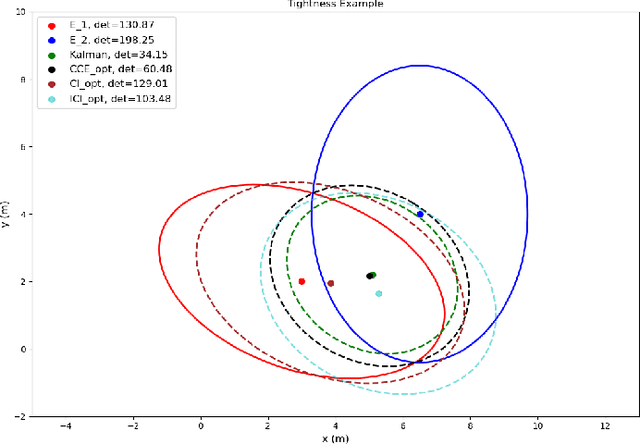
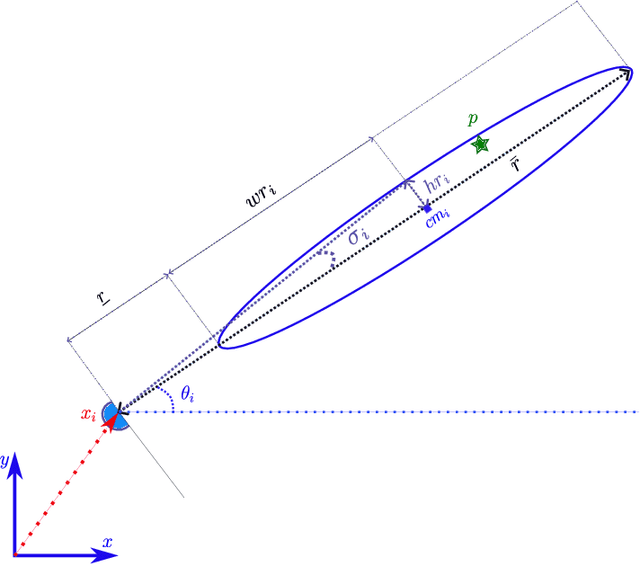

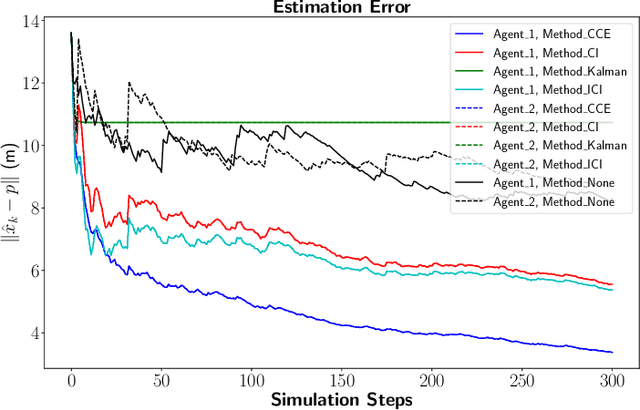
We consider the problem of collaborative bearing estimation using a method with historic roots in set theoretic estimation techniques. We refer to this method as the Convex Combination Ellipsoid (CCE) method and show that it provides a less conservative covariance estimate than the well known Covariance Intersection (CI) method. The CCE method does not introduce additional uncertainty that was not already present in the prior estimates. Using our proposed approach for collaborative bearing estimation, the nonlinearity of the bearing measurement is captured as an uncertainty ellipsoid thereby avoiding the need for linearization or approximation via sampling procedures. Simulations are undertaken to evaluate the relative performance of the collaborative bearing estimation solution using the proposed (CCE) and typical (CI) methods.
Inertial Collaborative Localisation for Autonomous Vehicles using a Minimum Energy Filter
Apr 13, 2021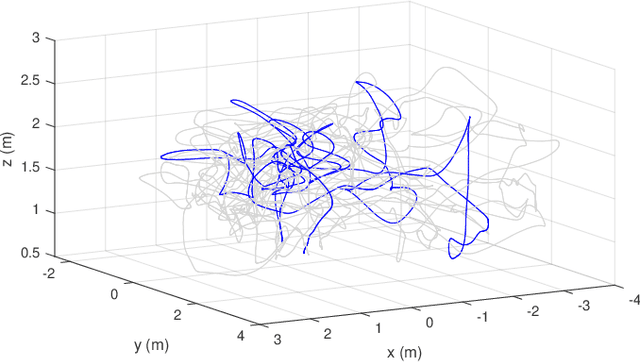
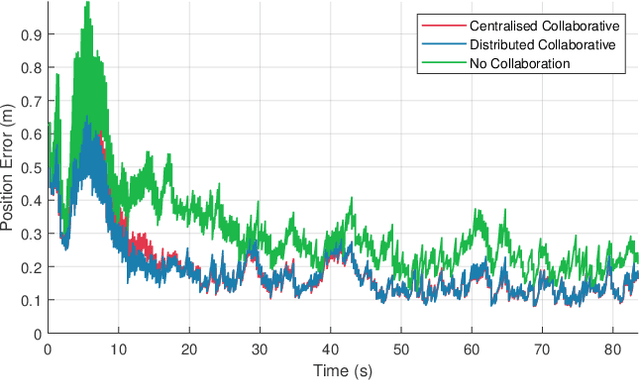
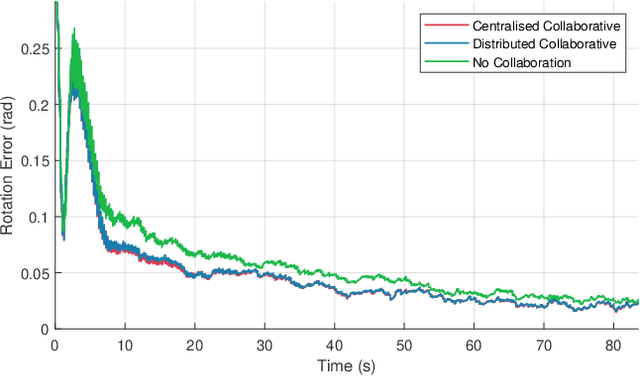
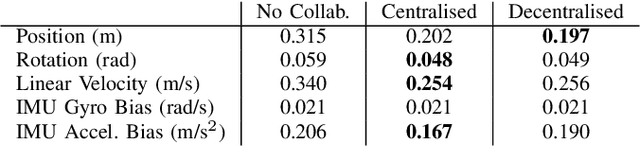
Collaborative Localisation has been studied extensively in recent years as a way to improve pose estimation of unmanned aerial vehicles in challenging environments. However little attention has been paid toward advancing the underlying filter design beyond standard Extended Kalman Filter-based approaches. In this paper, we detail a discrete-time collaborative localisation filter using the deterministic minimum-energy framework. The filter incorporates measurements from an inertial measurement unit and models the effects of sensor bias and gravitational acceleration. We present a simulation based on real-world vehicle trajectories and IMU data that demonstrates how collaborative localisation can improve performance over single-vehicle methods.
A Minimum Energy Filter for Localisation of an Unmanned Aerial Vehicle
Sep 10, 2020
Accurate localisation of unmanned aerial vehicles is vital for the next generation of automation tasks. This paper proposes a minimum energy filter for velocity-aided pose estimation on the extended special Euclidean group. The approach taken exploits the Lie-group symmetry of the problem to combine Inertial Measurement Unit (IMU) sensor output with landmark measurements into a robust and high performance state estimate. We propose an asynchronous discrete-time implementation to fuse high bandwidth IMU with low bandwidth discrete-time landmark measurements typical of real-world scenarios. The filter's performance is demonstrated by simulation.
An Observer Design for Visual Simultaneous Localisation and Mapping with Output Equivariance
May 29, 2020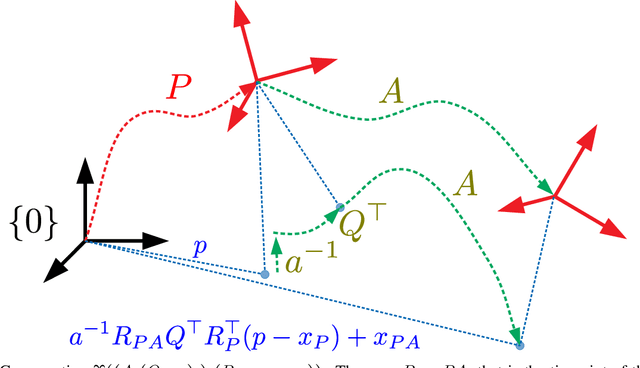
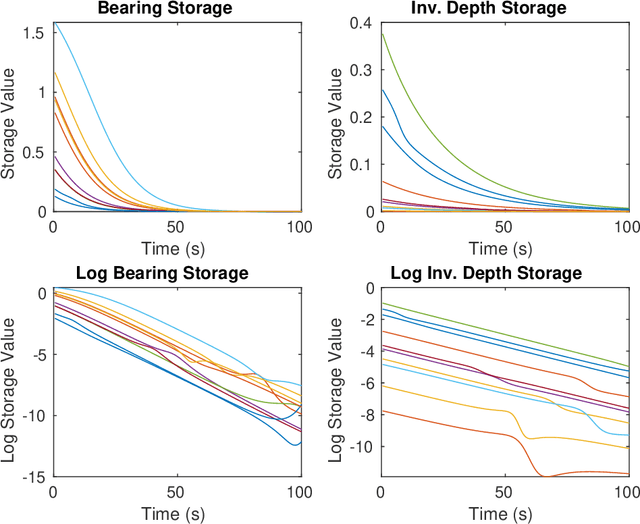
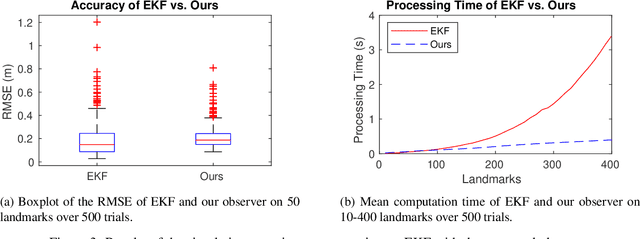
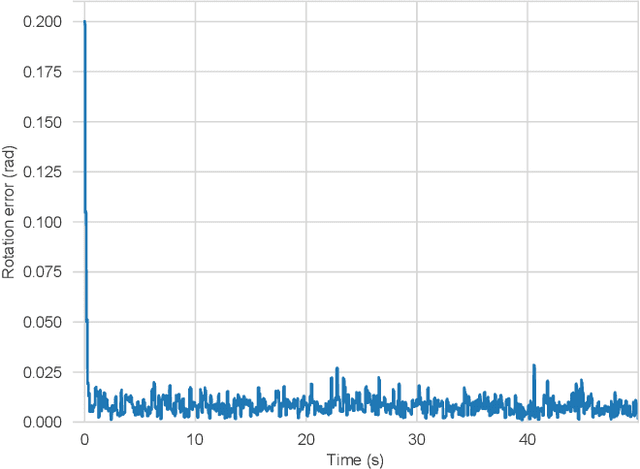
Visual Simultaneous Localisation and Mapping (VSLAM) is a key enabling technology for small embedded robotic systems such as aerial vehicles. Recent advances in equivariant filter and observer design offer the potential of a new generation of highly robust algorithms with low memory and computation requirements for embedded system applications. This paper studies observer design on the symmetry group proposed in previous work by the authors, in the case where inverse depth measurements are available. Exploiting this symmetry leads to a simple fully non-linear gradient based observer with almost global asymptotic and local exponential stability properties. Simulation experiments verify the observer design, and demonstrate that the proposed observer achieves similar accuracy to the widely used Extended Kalman Filter with significant gains in processing time (linear verses quadratic bounds with respect to number of landmarks) and qualitative improvements in robustness.
A Minimum Energy Filter for Distributed Multirobot Localisation
May 15, 2020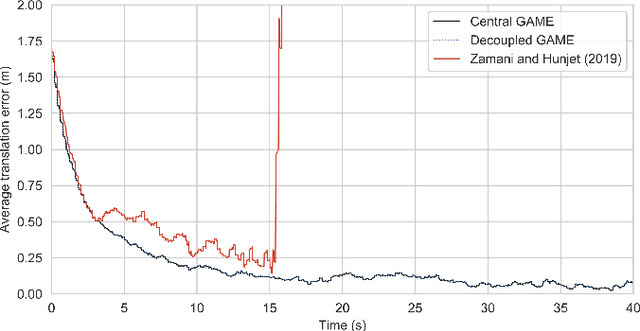

We present a new approach to the cooperative localisation problem by applying the theory of minimum energy filtering. We consider the problem of estimating the pose of a group of mobile robots in an environment where robots can perceive fixed landmarks and neighbouring robots as well as share information with others over a communication channel. Whereas the vast majority of the existing literature applies some variant of a Kalman Filter, we derive a set of filter equations for the global state estimate based on the principle of minimum energy filtering. We show how the filter equations can be decoupled and the calculations distributed among the robots in the network without requiring a central processing node. Finally, we provide a demonstration of the filter's performance in simulation.
An Equivariant Observer Design for Visual Localisation and Mapping
Apr 04, 2019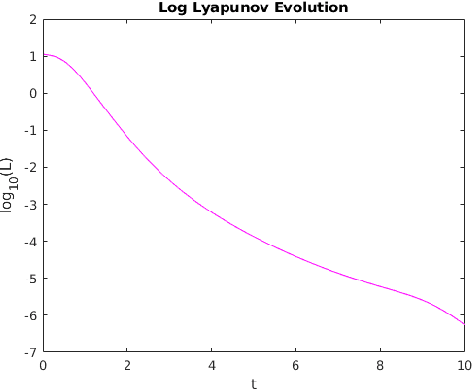

This paper builds on recent work on Simultaneous Localisation and Mapping (SLAM) in the non-linear observer community, by framing the visual localisation and mapping problem as a continuous-time equivariant observer design problem on the symmetry group of a kinematic system. The state-space is a quotient of the robot pose expressed on SE(3) and multiple copies of real projective space, used to represent both points in space and bearings in a single unified framework. An observer with decoupled Riccati-gains for each landmark is derived and we show that its error system is almost globally asymptotically stable and exponentially stable in-the-large.
Feature-based Recursive Observer Design for Homography Estimation
Jun 09, 2016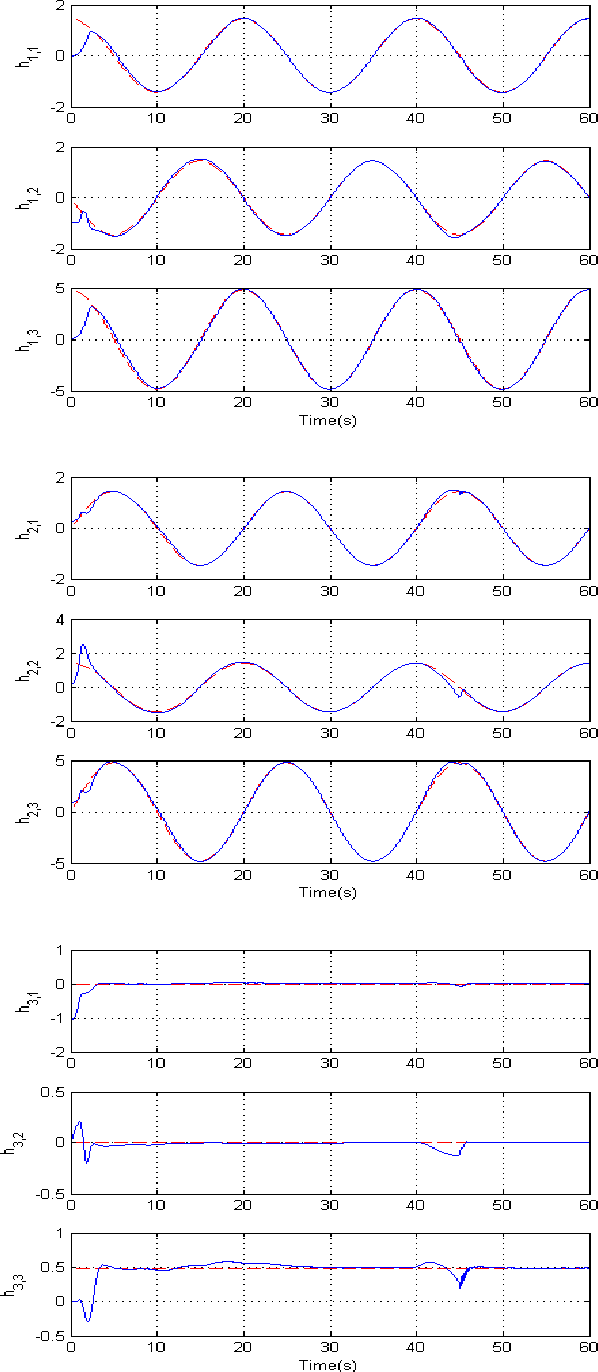
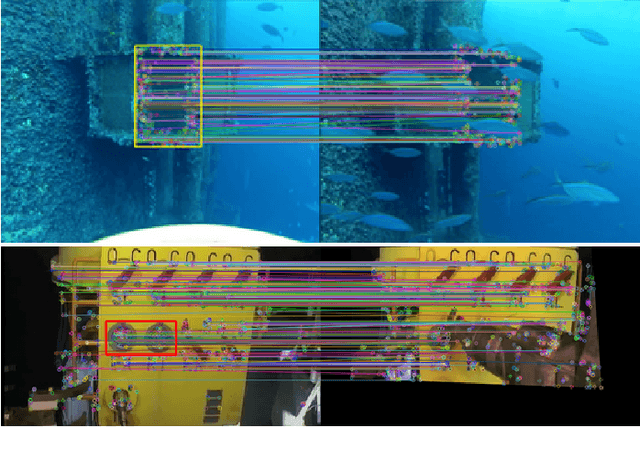

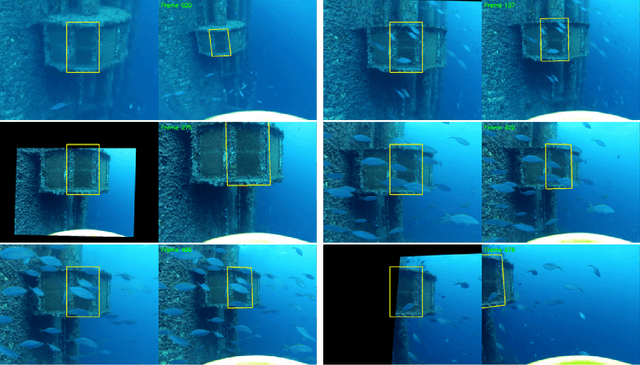
This paper presents a new algorithm for online estimation of a sequence of homographies applicable to image sequences obtained from robotic vehicles equipped with vision sensors. The approach taken exploits the underlying Special Linear group structure of the set of homographies along with gyroscope measurements and direct point-feature correspondences between images to develop temporal filter for the homography estimate. Theoretical analysis and experimental results are provided to demonstrate the robustness of the proposed algorithm. The experimental results show excellent performance even in the case of very fast camera motion (relative to frame rate), severe occlusion, and in the presence of specular reflections.