 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGalilean State Estimation for Inertial Navigation Systems with Unknown Time Delay
May 13, 2026Many Inertial Navigation Systems (INS) use Global Navigation Satellite System (GNSS) position as the primary measurement to drive filter performance and bound error growth. However, commercial-grade GNSS receivers introduce unknown measurement delays ranging from 50 ms to 300 ms depending on sensor quality and operating mode. Such time delays can significantly degrade INS performance unless they are explicitly compensated for. Existing algorithms commonly estimate this delay offline, run the filter concurrently with GNSS measurements using buffered Inertial Measurement Unit (IMU) data, and predict the current state by forward-integrating buffered inertial measurements via IMU preintegration. The state-of-the-art online method is an Extended Kalman Filter (EKF) that explicitly models the time delay as a state parameter, which defines the preintegration duration. This paper introduces a novel geometric framework for modeling time-delayed INS, in which Galilean symmetry is leveraged to provide a joint representation of space and time for consistent state estimation. An Equivariant Filter (EqF) is derived for the coupled estimation of navigation states and time delay. Validation is performed on two fixed-wing Uncrewed Aerial Vehicles (UAV) with GNSS time lags of 90 ms and 120 ms. The test flights last two to three minutes. Simulations further investigate delays up to 500 ms and provide a statistical comparison against the state-of-the-art EKF. Results show that the EqF preserves accuracy and consistency, while the EKF lacks consistency and its performance degrades significantly with increasing measurement delays.
Relative Pose-Velocity Estimation Using Dual IMU Measurements and Relative Position Sensing
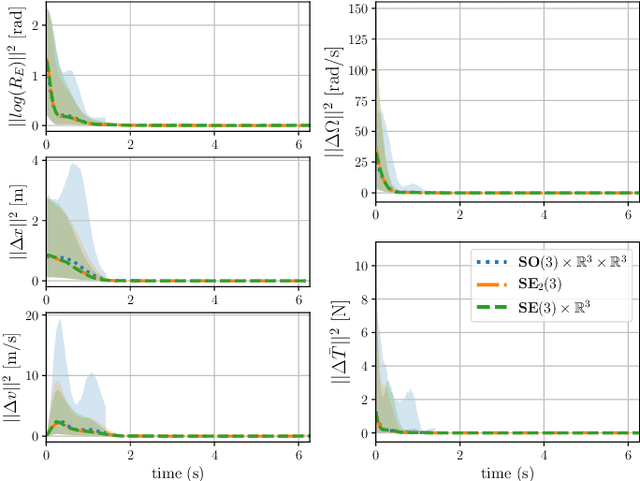
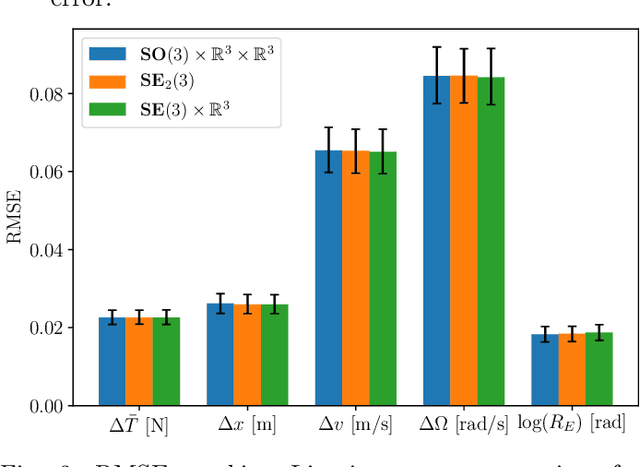
May 13, 2026This paper addresses the problem of estimating the relative pose (position and orientation) and velocity of a vehicle with respect to a moving target, where both are equipped with Inertial Measurement Units (IMUs), assuming the availability of relative position or bearing measurements. The body-target relative dynamics are formulated on $\mathbf{SE}_2(3)$ and recast into a linear time-varying (LTV) model in the ambient space $\mathbb{R}^{15}$, on which a deterministic Riccati observer is designed. We analyze the uniform observability (UO) conditions required to guarantee global exponential convergence of the estimation error in the ambient space for both measurement cases. In the case of relative position measurements, UO requires only a persistence-of-excitation condition on the target acceleration, whereas for bearing measurements, additional conditions are required. Building on this, a nonlinear complementary filter on $\mathbf{SO}(3)$ is designed to provide a smooth estimate of the orientation component of the state with almost global asymptotic stability. Finally, simulation results are provided to validate the proposed solution.
Complementary Filtering on SO(3) for Attitude Estimation with Scalar Measurements
Apr 09, 2026Attitude estimation using scalar measurements, corresponding to partial vectorial observations, arises naturally when inertial vectors are not fully observed but only measured along specific body-frame vectors. Such measurements arise in problems involving incomplete vector measurements or attitude constraints derived from heterogeneous sensor information. Building on the classical complementary filter on SO(3), we propose an observer with a modified innovation term tailored to this scalar-output structure. The main result shows that almost-global asymptotic stability is recovered, under suitable persistence of excitation conditions, when at least three inertial vectors are measured along a common body-frame vector, which is consistent with the three-dimensional structure of SO(3). For two-scalar configurations - corresponding either to one inertial vector measured along two body-frame vectors, or to two inertial vectors measured along a common body-frame vector - we further derive sufficient conditions guaranteeing convergence within a reduced basin of attraction. Different examples and numerical results demonstrate the effectiveness of the proposed scalar-based complementary filter for attitude estimation in challenging scenarios involving reduced sensing and/or novel sensing modalities.
Scalar-Measurement Attitude Estimation on $\mathbf{SO}(3)$ with Bias Compensation
Mar 03, 2026Attitude estimation methods typically rely on full vector measurements from inertial sensors such as accelerometers and magnetometers. This paper shows that reliable estimation can also be achieved using only scalar measurements, which naturally arise either as components of vector readings or as independent constraints from other sensing modalities. We propose nonlinear deterministic observers on $\mathbf{SO}(3)$ that incorporate gyroscope bias compensation and guarantee uniform local exponential stability under suitable observability conditions. A key feature of the framework is its robustness to partial sensing: accurate estimation is maintained even when only a subset of vector components is available. Experimental validation on the BROAD dataset confirms consistent performance across progressively reduced measurement configurations, with estimation errors remaining small even under severe information loss. To the best of our knowledge, this is the first work to establish fundamental observability results showing that two scalar measurements under suitable excitation suffice for attitude estimation, and that three are enough in the static case. These results position scalar-measurement-based observers as a practical and reliable alternative to conventional vector-based approaches.
Vision-Aided Relative State Estimation for Approach and Landing on a Moving Platform with Inertial Measurements
Dec 22, 2025



This paper tackles the problem of estimating the relative position, orientation, and velocity between a UAV and a planar platform undergoing arbitrary 3D motion during approach and landing. The estimation relies on measurements from Inertial Measurement Units (IMUs) mounted on both systems, assuming there is a suitable communication channel to exchange data, together with visual information provided by an onboard monocular camera, from which the bearing (line-of-sight direction) to the platform's center and the normal vector of its planar surface are extracted. We propose a cascade observer with a complementary filter on SO(3) to reconstruct the relative attitude, followed by a linear Riccati observer for relative position and velocity estimation. Convergence of both observers is established under persistently exciting conditions, and the cascade is shown to be almost globally asymptotically and locally exponentially stable. We further extend the design to the case where the platform's rotation is restricted to its normal axis and show that its measured linear acceleration can be exploited to recover the remaining unobservable rotation angle. A sufficient condition to ensure local exponential convergence in this setting is provided. The performance of the proposed observers is validated through extensive simulations.
Observer Design for Optical Flow-Based Visual-Inertial Odometry with Almost-Global Convergence
Aug 28, 2025This paper presents a novel cascaded observer architecture that combines optical flow and IMU measurements to perform continuous monocular visual-inertial odometry (VIO). The proposed solution estimates body-frame velocity and gravity direction simultaneously by fusing velocity direction information from optical flow measurements with gyro and accelerometer data. This fusion is achieved using a globally exponentially stable Riccati observer, which operates under persistently exciting translational motion conditions. The estimated gravity direction in the body frame is then employed, along with an optional magnetometer measurement, to design a complementary observer on $\mathbf{SO}(3)$ for attitude estimation. The resulting interconnected observer architecture is shown to be almost globally asymptotically stable. To extract the velocity direction from sparse optical flow data, a gradient descent algorithm is developed to solve a constrained minimization problem on the unit sphere. The effectiveness of the proposed algorithms is validated through simulation results.
Exploiting Different Symmetries for Trajectory Tracking Control with Application to Quadrotors
Jul 16, 2022
High performance trajectory tracking control of quadrotor vehicles is an important challenge in aerial robotics. Symmetry is a fundamental property of physical systems and offers the potential to provide a tool to design high-performance control algorithms. We propose a design methodology that takes any given symmetry, linearises the associated error in a single set of coordinates, and uses LQR design to obtain a high performance control; an approach we term Equivariant Regulator design. We show that quadrotor vehicles admit several different symmetries: the direct product symmetry, the extended pose symmetry and the pose and velocity symmetry, and show that each symmetry can be used to define a global error. We compare the linearised systems via simulation and find that the extended pose and pose and velocity symmetries outperform the direct product symmetry in the presence of large disturbances. This suggests that choices of equivariant and group affine symmetries have improved linearisation error.
An Observer Design for Visual Simultaneous Localisation and Mapping with Output Equivariance
May 29, 2020
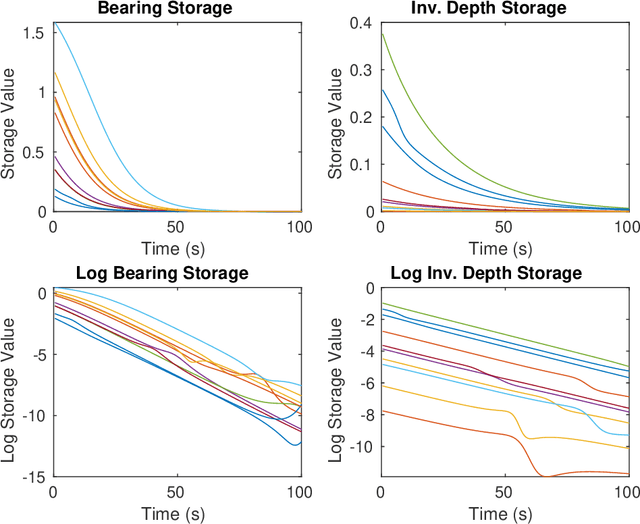
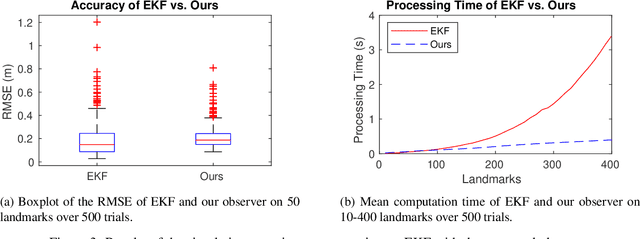
Visual Simultaneous Localisation and Mapping (VSLAM) is a key enabling technology for small embedded robotic systems such as aerial vehicles. Recent advances in equivariant filter and observer design offer the potential of a new generation of highly robust algorithms with low memory and computation requirements for embedded system applications. This paper studies observer design on the symmetry group proposed in previous work by the authors, in the case where inverse depth measurements are available. Exploiting this symmetry leads to a simple fully non-linear gradient based observer with almost global asymptotic and local exponential stability properties. Simulation experiments verify the observer design, and demonstrate that the proposed observer achieves similar accuracy to the widely used Extended Kalman Filter with significant gains in processing time (linear verses quadratic bounds with respect to number of landmarks) and qualitative improvements in robustness.
An Equivariant Observer Design for Visual Localisation and Mapping
Apr 04, 2019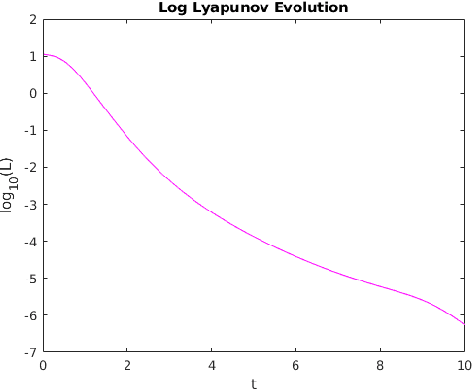

This paper builds on recent work on Simultaneous Localisation and Mapping (SLAM) in the non-linear observer community, by framing the visual localisation and mapping problem as a continuous-time equivariant observer design problem on the symmetry group of a kinematic system. The state-space is a quotient of the robot pose expressed on SE(3) and multiple copies of real projective space, used to represent both points in space and bearings in a single unified framework. An observer with decoupled Riccati-gains for each landmark is derived and we show that its error system is almost globally asymptotically stable and exponentially stable in-the-large.
Feature-based Recursive Observer Design for Homography Estimation
Jun 09, 2016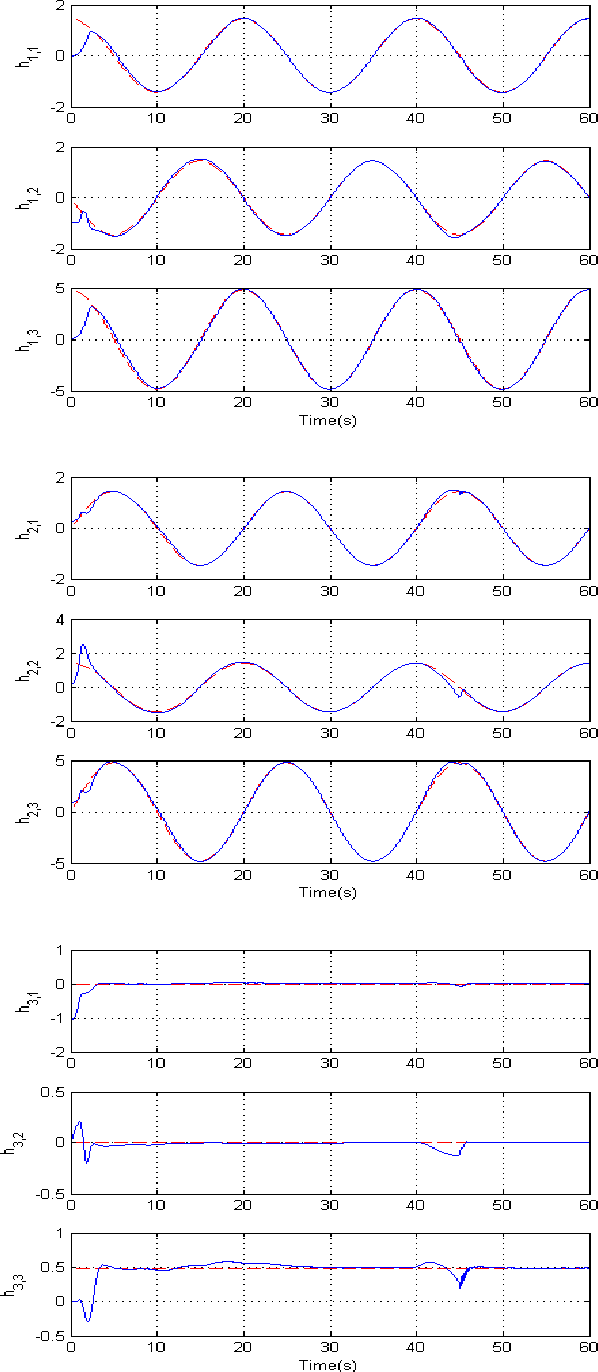
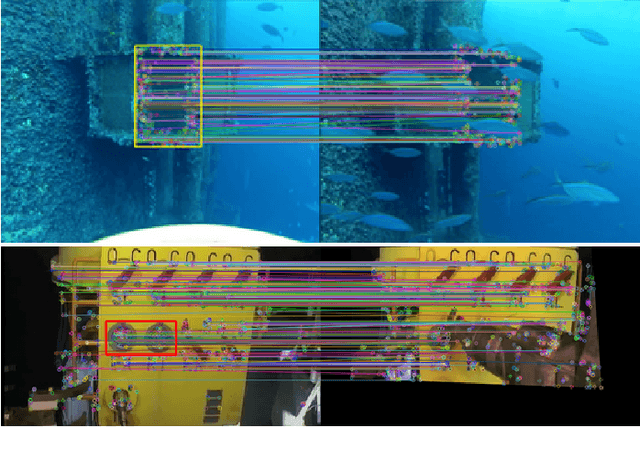

This paper presents a new algorithm for online estimation of a sequence of homographies applicable to image sequences obtained from robotic vehicles equipped with vision sensors. The approach taken exploits the underlying Special Linear group structure of the set of homographies along with gyroscope measurements and direct point-feature correspondences between images to develop temporal filter for the homography estimate. Theoretical analysis and experimental results are provided to demonstrate the robustness of the proposed algorithm. The experimental results show excellent performance even in the case of very fast camera motion (relative to frame rate), severe occlusion, and in the presence of specular reflections.