Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature-based Recursive Observer Design for Homography Estimation
Paper and Code
Jun 09, 2016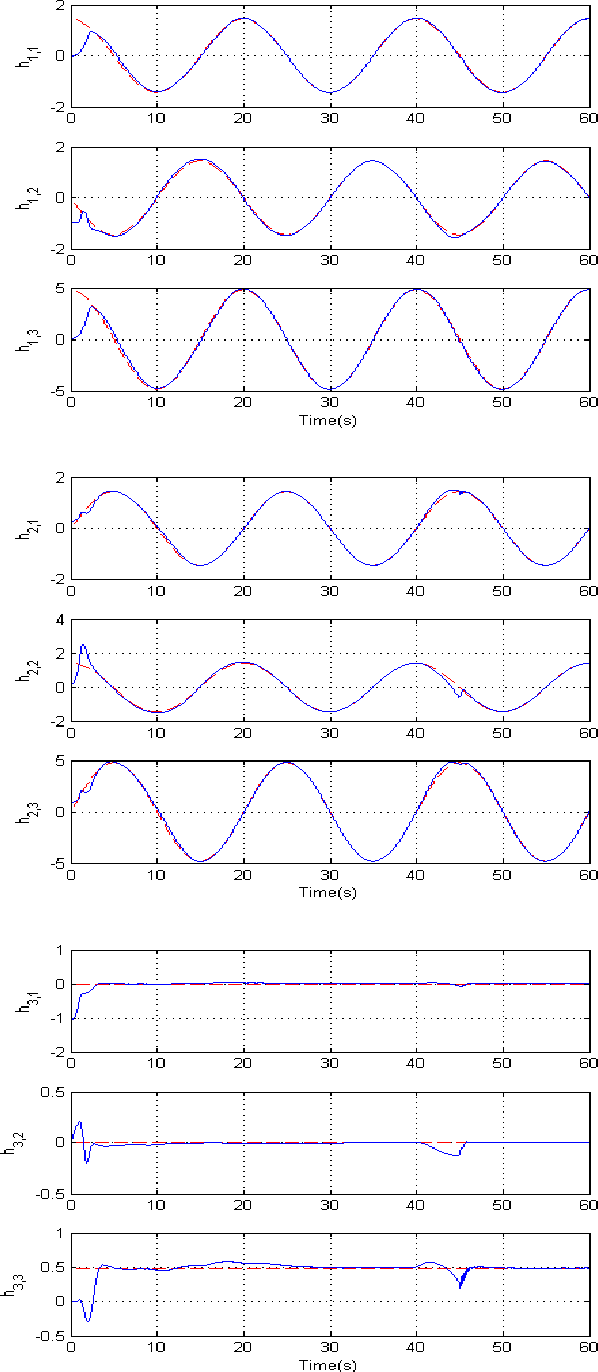
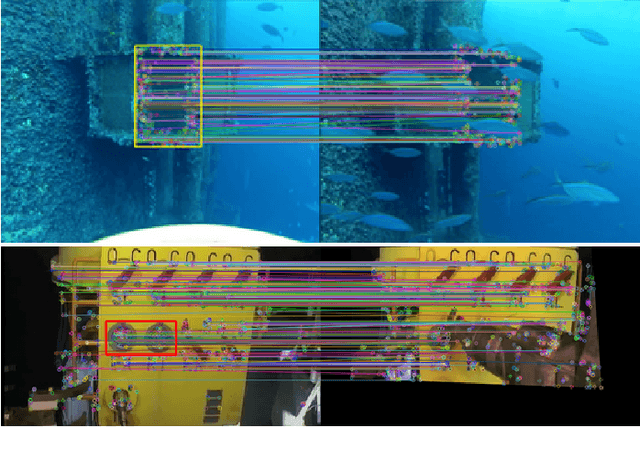

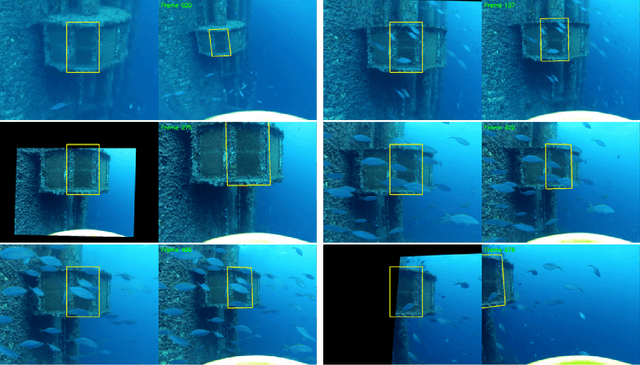
This paper presents a new algorithm for online estimation of a sequence of homographies applicable to image sequences obtained from robotic vehicles equipped with vision sensors. The approach taken exploits the underlying Special Linear group structure of the set of homographies along with gyroscope measurements and direct point-feature correspondences between images to develop temporal filter for the homography estimate. Theoretical analysis and experimental results are provided to demonstrate the robustness of the proposed algorithm. The experimental results show excellent performance even in the case of very fast camera motion (relative to frame rate), severe occlusion, and in the presence of specular reflections.
View paper on