Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Equivariant Observer Design for Visual Localisation and Mapping
Paper and Code
Apr 04, 2019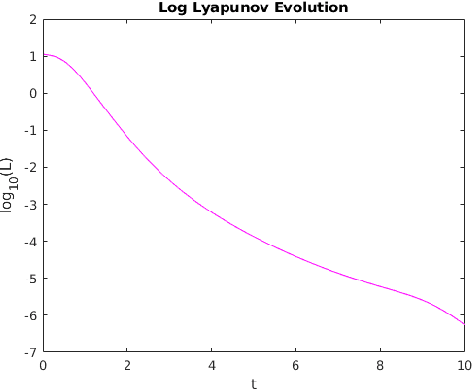

This paper builds on recent work on Simultaneous Localisation and Mapping (SLAM) in the non-linear observer community, by framing the visual localisation and mapping problem as a continuous-time equivariant observer design problem on the symmetry group of a kinematic system. The state-space is a quotient of the robot pose expressed on SE(3) and multiple copies of real projective space, used to represent both points in space and bearings in a single unified framework. An observer with decoupled Riccati-gains for each landmark is derived and we show that its error system is almost globally asymptotically stable and exponentially stable in-the-large.
* 8 pages, 2 figures, awaiting review
View paper on