 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEXGEN: An Effective and Efficient Information Gain Approximation for Information Gathering Path Planning
May 04, 2024Autonomous robots for gathering information on objects of interest has numerous real-world applications because of they improve efficiency, performance and safety. Realizing autonomy demands online planning algorithms to solve sequential decision making problems under uncertainty; because, objects of interest are often dynamic, object state, such as location is not directly observable and are obtained from noisy measurements. Such planning problems are notoriously difficult due to the combinatorial nature of predicting the future to make optimal decisions. For information theoretic planning algorithms, we develop a computationally efficient and effective approximation for the difficult problem of predicting the likely sensor measurements from uncertain belief states}. The approach more accurately predicts information gain from information gathering actions. Our theoretical analysis proves the proposed formulation achieves a lower prediction error than the current efficient-method. We demonstrate improved performance gains in radio-source tracking and localization problems using extensive simulated and field experiments with a multirotor aerial robot.
LAVAPilot: Lightweight UAV Trajectory Planner with Situational Awareness for Embedded Autonomy to Track and Locate Radio-tags
Jul 31, 2020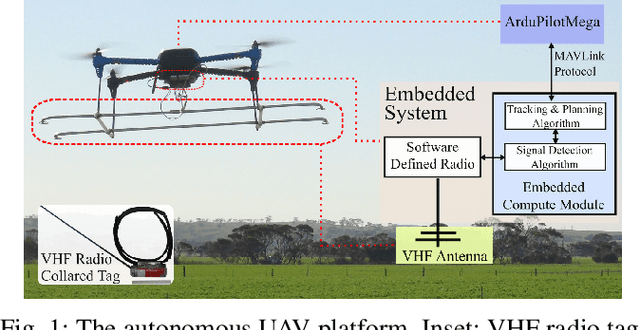
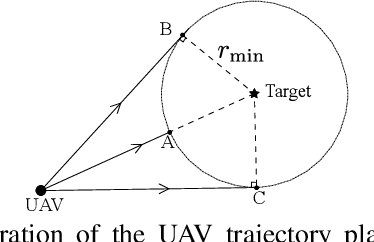
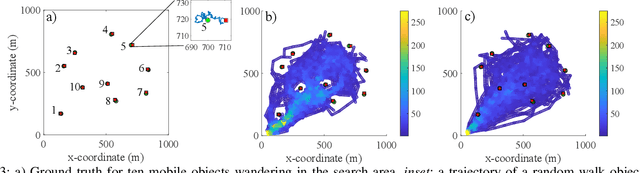
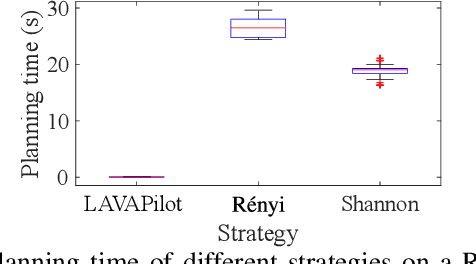
Tracking and locating radio-tagged wildlife is a labor-intensive and time-consuming task necessary in wildlife conservation. In this article, we focus on the problem of achieving embedded autonomy for a resource-limited aerial robot for the task capable of avoiding undesirable disturbances to wildlife. We employ a lightweight sensor system capable of simultaneous (noisy) measurements of radio signal strength information from multiple tags for estimating object locations. We formulate a new lightweight task-based trajectory planning method-LAVAPilot-with a greedy evaluation strategy and a void functional formulation to achieve situational awareness to maintain a safe distance from objects of interest. Conceptually, we embed our intuition of moving closer to reduce the uncertainty of measurements into LAVAPilot instead of employing a computationally intensive information gain based planning strategy. We employ LAVAPilot and the sensor to build a lightweight aerial robot platform with fully embedded autonomy for jointly tracking and planning to track and locate multiple VHF radio collar tags used by conservation biologists. Using extensive Monte Carlo simulation-based experiments, implementations on a single board compute module, and field experiments using an aerial robot platform with multiple VHF radio collar tags, we evaluate our joint planning and tracking algorithms. Further, we compare our method with other information-based planning methods with and without situational awareness to demonstrate the effectiveness of our robot executing LAVAPilot. Our experiments demonstrate that LAVAPilot significantly reduces (by 98.5%) the computational cost of planning to enable real-time planning decisions whilst achieving similar localization accuracy of objects compared to information gain based planning methods, albeit taking a slightly longer time to complete a mission.