 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multi-object Tracking under Limited Field of View Sensors
Paper and Code


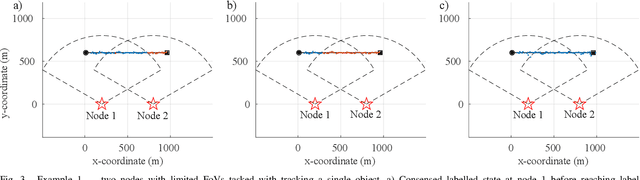

We consider the challenging problem of tracking multiple objects using a distributed network of sensors. In the pragmatic settings of a limited field of view (FoV) sensors, computing and communication resources of nodes, we develop a novel distributed multi-target algorithm that fuses local multi-object states instead of local multi-object densities. This algorithm uses a novel label consensus approach that reduces label inconsistency, caused by movements of objects from one node's limited FoV to another. To accomplish this, we formalise the concept of label consistency and determine a sufficient condition to achieve it. The proposed algorithm is i) fast and requires significantly less processing time than fusion methods using multi-object filtering densities, and ii) achieves better tracking accuracy by considering tracking errors measured by the Optimal Sub-Pattern Assignment (OSPA) metric over several scans rather than a single scan. Numerical experiments demonstrate the real-time capability of our proposed solution, in computational efficiency and accuracy compared to state-of-the-art solutions in challenging scenarios.