 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlphaStar Unplugged: Large-Scale Offline Reinforcement Learning
Aug 07, 2023



StarCraft II is one of the most challenging simulated reinforcement learning environments; it is partially observable, stochastic, multi-agent, and mastering StarCraft II requires strategic planning over long time horizons with real-time low-level execution. It also has an active professional competitive scene. StarCraft II is uniquely suited for advancing offline RL algorithms, both because of its challenging nature and because Blizzard has released a massive dataset of millions of StarCraft II games played by human players. This paper leverages that and establishes a benchmark, called AlphaStar Unplugged, introducing unprecedented challenges for offline reinforcement learning. We define a dataset (a subset of Blizzard's release), tools standardizing an API for machine learning methods, and an evaluation protocol. We also present baseline agents, including behavior cloning, offline variants of actor-critic and MuZero. We improve the state of the art of agents using only offline data, and we achieve 90% win rate against previously published AlphaStar behavior cloning agent.
Tensor Programs V: Tuning Large Neural Networks via Zero-Shot Hyperparameter Transfer
Mar 28, 2022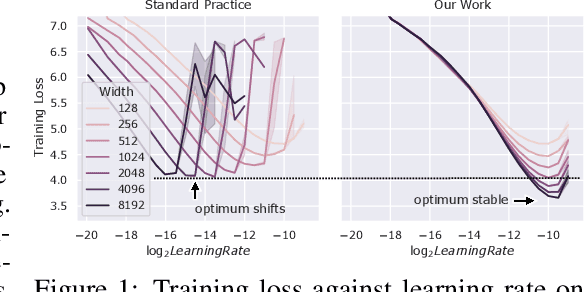

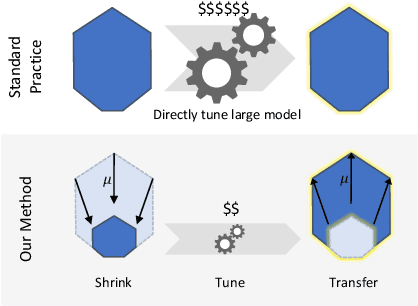

Hyperparameter (HP) tuning in deep learning is an expensive process, prohibitively so for neural networks (NNs) with billions of parameters. We show that, in the recently discovered Maximal Update Parametrization (muP), many optimal HPs remain stable even as model size changes. This leads to a new HP tuning paradigm we call muTransfer: parametrize the target model in muP, tune the HP indirectly on a smaller model, and zero-shot transfer them to the full-sized model, i.e., without directly tuning the latter at all. We verify muTransfer on Transformer and ResNet. For example, 1) by transferring pretraining HPs from a model of 13M parameters, we outperform published numbers of BERT-large (350M parameters), with a total tuning cost equivalent to pretraining BERT-large once; 2) by transferring from 40M parameters, we outperform published numbers of the 6.7B GPT-3 model, with tuning cost only 7% of total pretraining cost. A Pytorch implementation of our technique can be found at github.com/microsoft/mup and installable via `pip install mup`.
Formal Mathematics Statement Curriculum Learning
Feb 03, 2022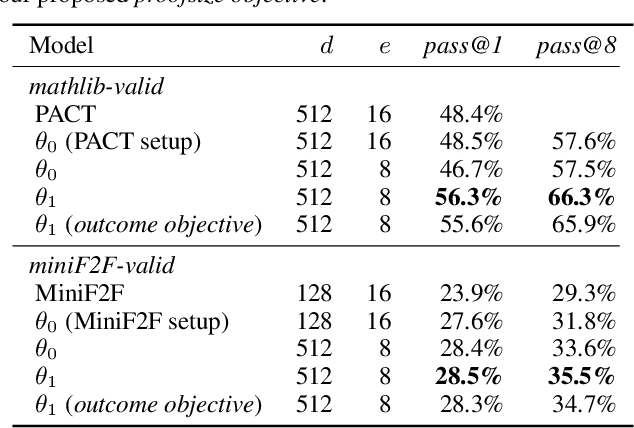
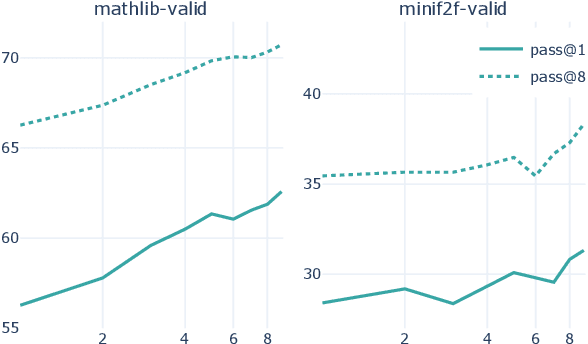
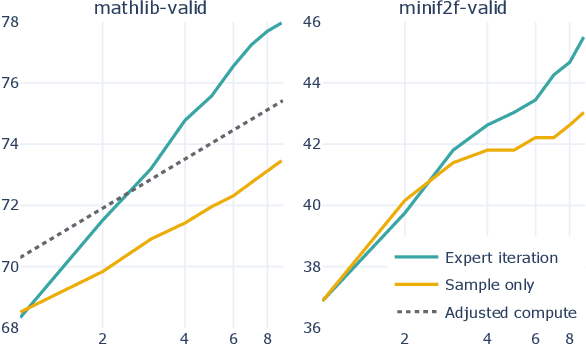
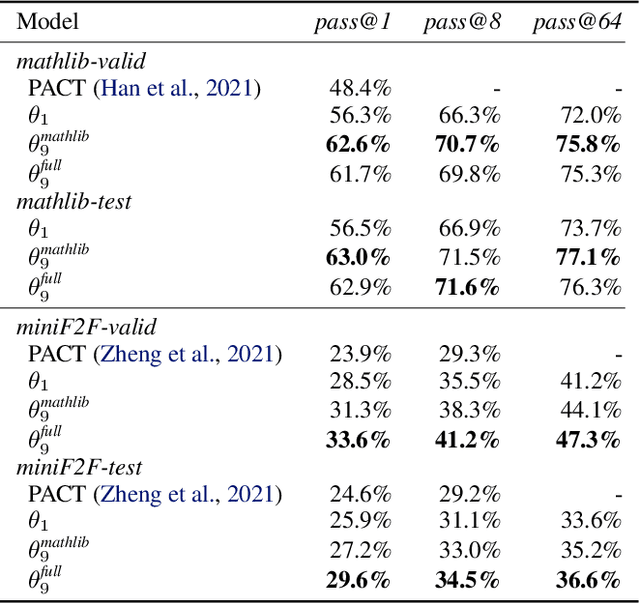
We explore the use of expert iteration in the context of language modeling applied to formal mathematics. We show that at same compute budget, expert iteration, by which we mean proof search interleaved with learning, dramatically outperforms proof search only. We also observe that when applied to a collection of formal statements of sufficiently varied difficulty, expert iteration is capable of finding and solving a curriculum of increasingly difficult problems, without the need for associated ground-truth proofs. Finally, by applying this expert iteration to a manually curated set of problem statements, we achieve state-of-the-art on the miniF2F benchmark, automatically solving multiple challenging problems drawn from high school olympiads.
Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets
Jan 06, 2022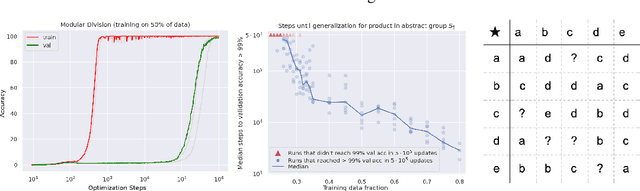
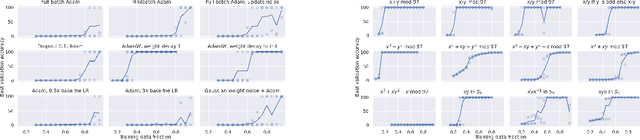
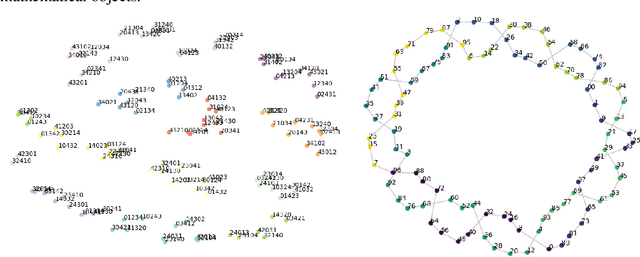
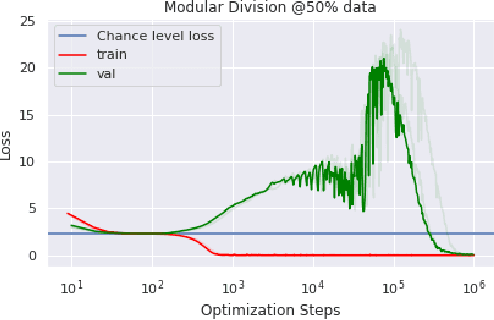
In this paper we propose to study generalization of neural networks on small algorithmically generated datasets. In this setting, questions about data efficiency, memorization, generalization, and speed of learning can be studied in great detail. In some situations we show that neural networks learn through a process of "grokking" a pattern in the data, improving generalization performance from random chance level to perfect generalization, and that this improvement in generalization can happen well past the point of overfitting. We also study generalization as a function of dataset size and find that smaller datasets require increasing amounts of optimization for generalization. We argue that these datasets provide a fertile ground for studying a poorly understood aspect of deep learning: generalization of overparametrized neural networks beyond memorization of the finite training dataset.
Scaling Language Models: Methods, Analysis & Insights from Training Gopher
Dec 08, 2021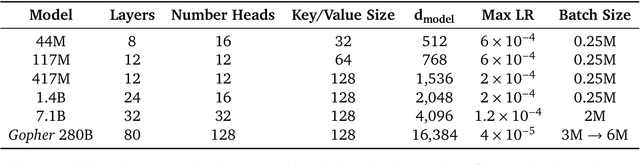
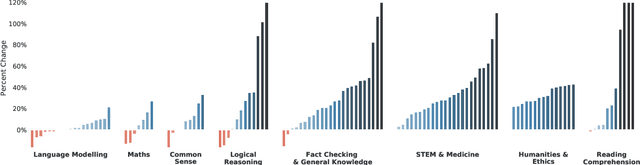
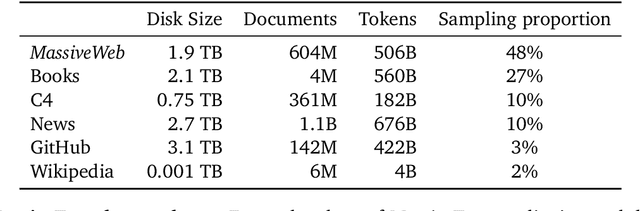
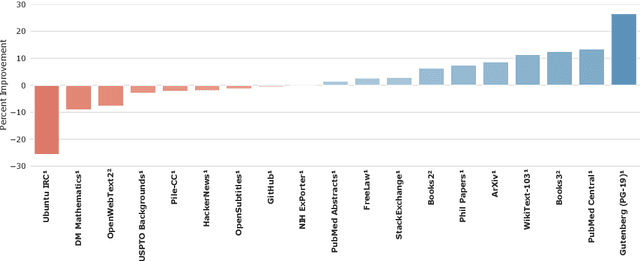
Language modelling provides a step towards intelligent communication systems by harnessing large repositories of written human knowledge to better predict and understand the world. In this paper, we present an analysis of Transformer-based language model performance across a wide range of model scales -- from models with tens of millions of parameters up to a 280 billion parameter model called Gopher. These models are evaluated on 152 diverse tasks, achieving state-of-the-art performance across the majority. Gains from scale are largest in areas such as reading comprehension, fact-checking, and the identification of toxic language, but logical and mathematical reasoning see less benefit. We provide a holistic analysis of the training dataset and model's behaviour, covering the intersection of model scale with bias and toxicity. Finally we discuss the application of language models to AI safety and the mitigation of downstream harms.
Unsupervised Neural Machine Translation with Generative Language Models Only
Oct 11, 2021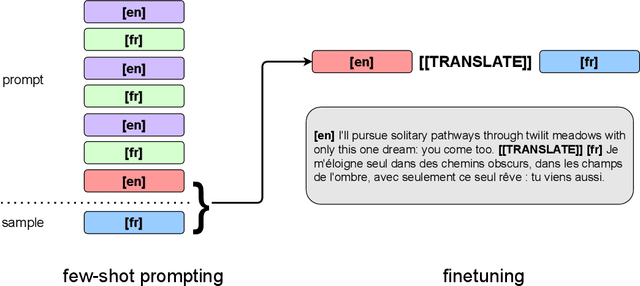
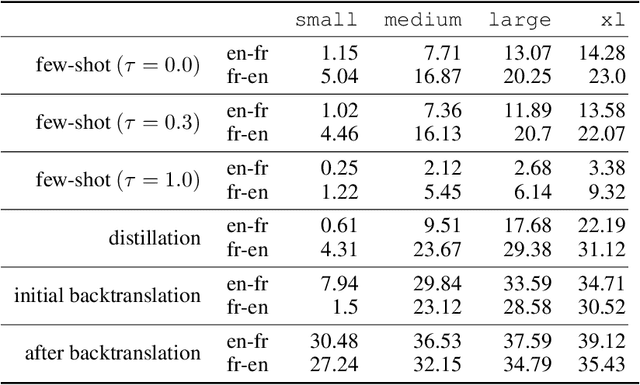
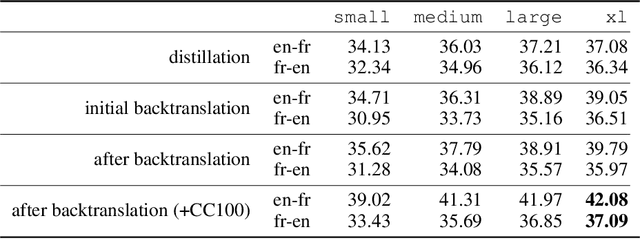

We show how to derive state-of-the-art unsupervised neural machine translation systems from generatively pre-trained language models. Our method consists of three steps: few-shot amplification, distillation, and backtranslation. We first use the zero-shot translation ability of large pre-trained language models to generate translations for a small set of unlabeled sentences. We then amplify these zero-shot translations by using them as few-shot demonstrations for sampling a larger synthetic dataset. This dataset is distilled by discarding the few-shot demonstrations and then fine-tuning. During backtranslation, we repeatedly generate translations for a set of inputs and then fine-tune a single language model on both directions of the translation task at once, ensuring cycle-consistency by swapping the roles of gold monotext and generated translations when fine-tuning. By using our method to leverage GPT-3's zero-shot translation capability, we achieve a new state-of-the-art in unsupervised translation on the WMT14 English-French benchmark, attaining a BLEU score of 42.1.
Evaluating Large Language Models Trained on Code
Jul 14, 2021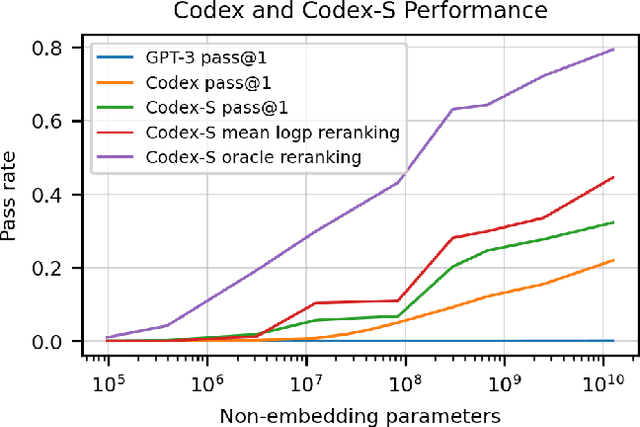
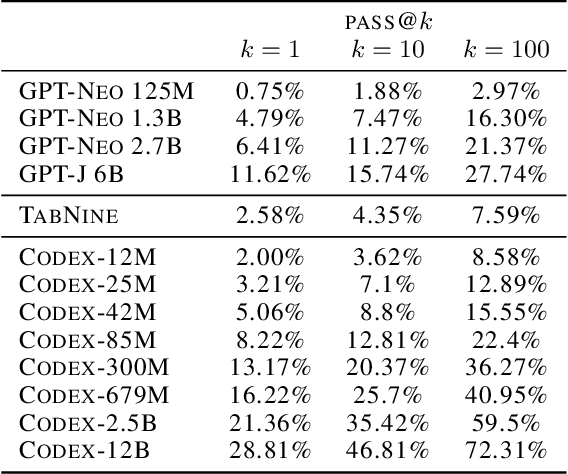
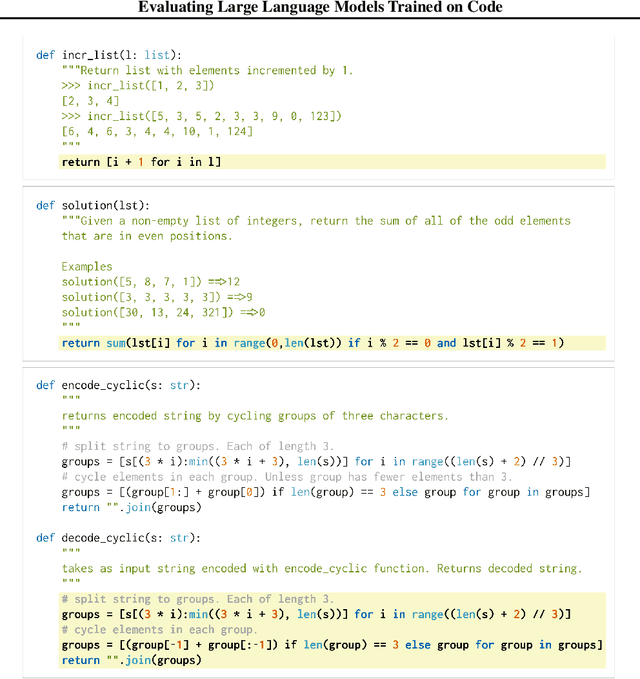
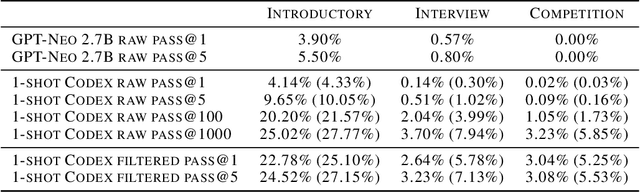
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Unsupervised Doodling and Painting with Improved SPIRAL
Oct 02, 2019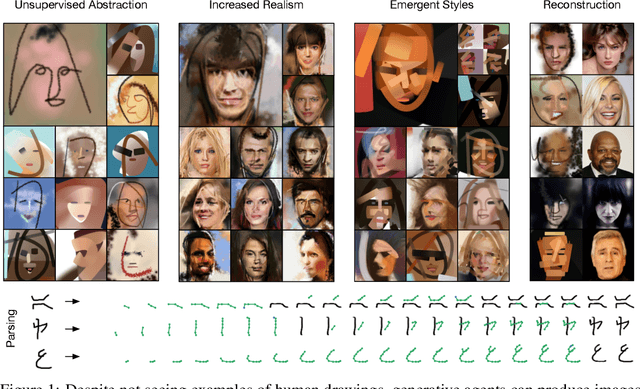


We investigate using reinforcement learning agents as generative models of images (extending arXiv:1804.01118). A generative agent controls a simulated painting environment, and is trained with rewards provided by a discriminator network simultaneously trained to assess the realism of the agent's samples, either unconditional or reconstructions. Compared to prior work, we make a number of improvements to the architectures of the agents and discriminators that lead to intriguing and at times surprising results. We find that when sufficiently constrained, generative agents can learn to produce images with a degree of visual abstraction, despite having only ever seen real photographs (no human brush strokes). And given enough time with the painting environment, they can produce images with considerable realism. These results show that, under the right circumstances, some aspects of human drawing can emerge from simulated embodiment, without the need for external supervision, imitation or social cues. Finally, we note the framework's potential for use in creative applications.
Relational Deep Reinforcement Learning
Jun 28, 2018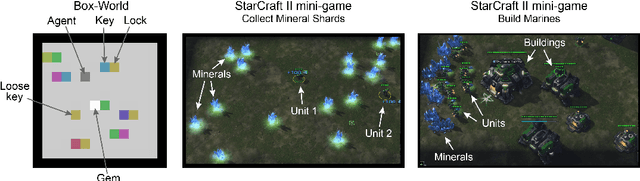
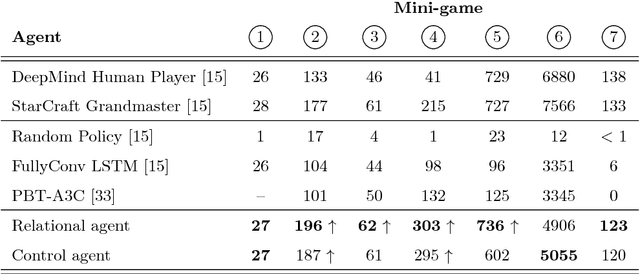
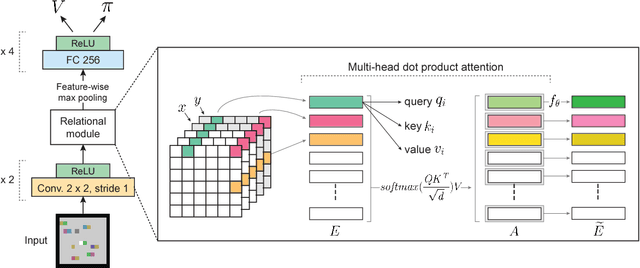
We introduce an approach for deep reinforcement learning (RL) that improves upon the efficiency, generalization capacity, and interpretability of conventional approaches through structured perception and relational reasoning. It uses self-attention to iteratively reason about the relations between entities in a scene and to guide a model-free policy. Our results show that in a novel navigation and planning task called Box-World, our agent finds interpretable solutions that improve upon baselines in terms of sample complexity, ability to generalize to more complex scenes than experienced during training, and overall performance. In the StarCraft II Learning Environment, our agent achieves state-of-the-art performance on six mini-games -- surpassing human grandmaster performance on four. By considering architectural inductive biases, our work opens new directions for overcoming important, but stubborn, challenges in deep RL.
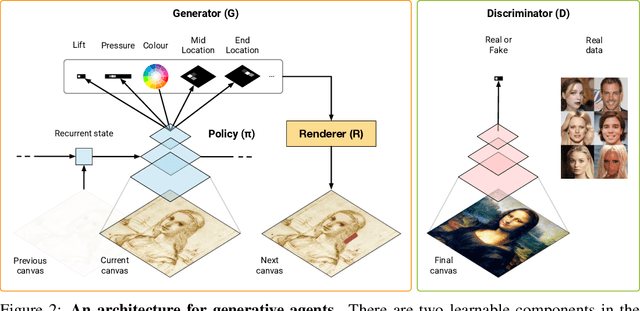
Synthesizing Programs for Images using Reinforced Adversarial Learning
Apr 03, 2018
Advances in deep generative networks have led to impressive results in recent years. Nevertheless, such models can often waste their capacity on the minutiae of datasets, presumably due to weak inductive biases in their decoders. This is where graphics engines may come in handy since they abstract away low-level details and represent images as high-level programs. Current methods that combine deep learning and renderers are limited by hand-crafted likelihood or distance functions, a need for large amounts of supervision, or difficulties in scaling their inference algorithms to richer datasets. To mitigate these issues, we present SPIRAL, an adversarially trained agent that generates a program which is executed by a graphics engine to interpret and sample images. The goal of this agent is to fool a discriminator network that distinguishes between real and rendered data, trained with a distributed reinforcement learning setup without any supervision. A surprising finding is that using the discriminator's output as a reward signal is the key to allow the agent to make meaningful progress at matching the desired output rendering. To the best of our knowledge, this is the first demonstration of an end-to-end, unsupervised and adversarial inverse graphics agent on challenging real world (MNIST, Omniglot, CelebA) and synthetic 3D datasets.