 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach for Characterizing Major Galaxy Mergers
Feb 09, 2021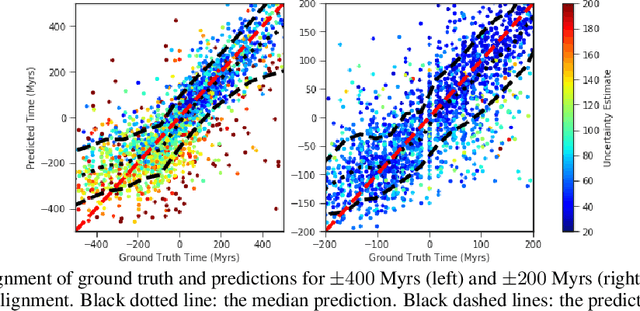

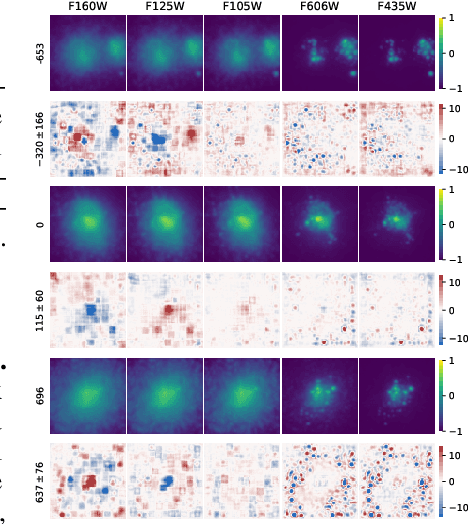
Fine-grained estimation of galaxy merger stages from observations is a key problem useful for validation of our current theoretical understanding of galaxy formation. To this end, we demonstrate a CNN-based regression model that is able to predict, for the first time, using a single image, the merger stage relative to the first perigee passage with a median error of 38.3 million years (Myrs) over a period of 400 Myrs. This model uses no specific dynamical modeling and learns only from simulated merger events. We show that our model provides reasonable estimates on real observations, approximately matching prior estimates provided by detailed dynamical modeling. We provide a preliminary interpretability analysis of our models, and demonstrate first steps toward calibrated uncertainty estimation.
Combining Q-Learning and Search with Amortized Value Estimates
Jan 10, 2020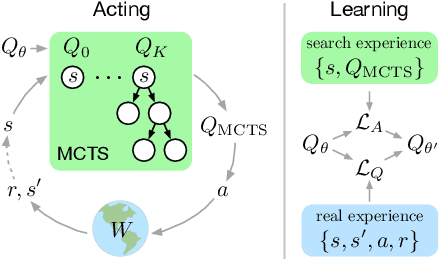
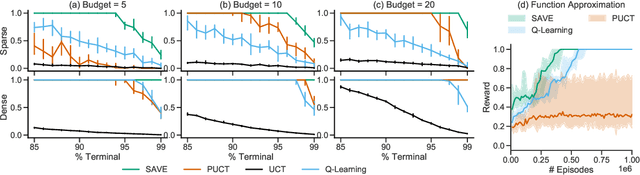
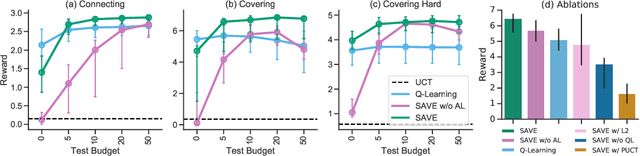
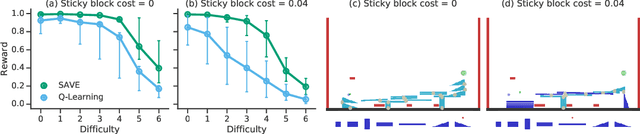
We introduce "Search with Amortized Value Estimates" (SAVE), an approach for combining model-free Q-learning with model-based Monte-Carlo Tree Search (MCTS). In SAVE, a learned prior over state-action values is used to guide MCTS, which estimates an improved set of state-action values. The new Q-estimates are then used in combination with real experience to update the prior. This effectively amortizes the value computation performed by MCTS, resulting in a cooperative relationship between model-free learning and model-based search. SAVE can be implemented on top of any Q-learning agent with access to a model, which we demonstrate by incorporating it into agents that perform challenging physical reasoning tasks and Atari. SAVE consistently achieves higher rewards with fewer training steps, and---in contrast to typical model-based search approaches---yields strong performance with very small search budgets. By combining real experience with information computed during search, SAVE demonstrates that it is possible to improve on both the performance of model-free learning and the computational cost of planning.
Object-oriented state editing for HRL
Oct 31, 2019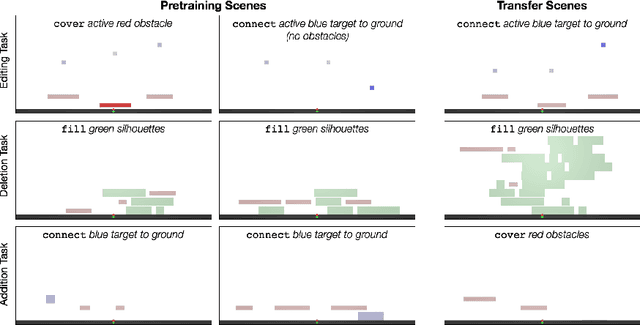
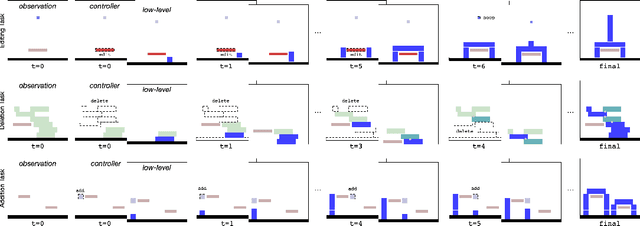
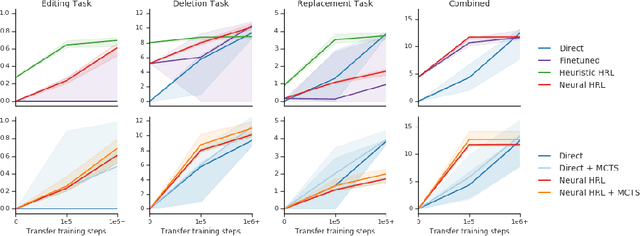

We introduce agents that use object-oriented reasoning to consider alternate states of the world in order to more quickly find solutions to problems. Specifically, a hierarchical controller directs a low-level agent to behave as if objects in the scene were added, deleted, or modified. The actions taken by the controller are defined over a graph-based representation of the scene, with actions corresponding to adding, deleting, or editing the nodes of a graph. We present preliminary results on three environments, demonstrating that our approach can achieve similar levels of reward as non-hierarchical agents, but with better data efficiency.
Hamiltonian Graph Networks with ODE Integrators
Sep 27, 2019
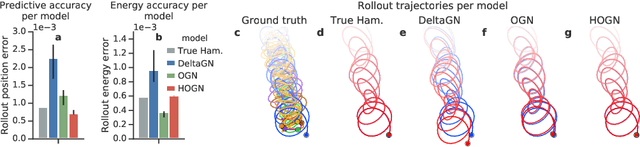

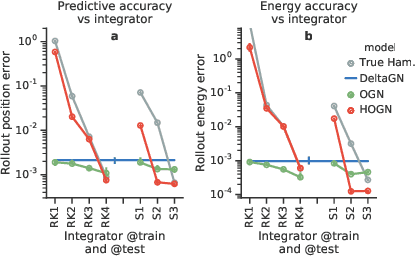
We introduce an approach for imposing physically informed inductive biases in learned simulation models. We combine graph networks with a differentiable ordinary differential equation integrator as a mechanism for predicting future states, and a Hamiltonian as an internal representation. We find that our approach outperforms baselines without these biases in terms of predictive accuracy, energy accuracy, and zero-shot generalization to time-step sizes and integrator orders not experienced during training. This advances the state-of-the-art of learned simulation, and in principle is applicable beyond physical domains.
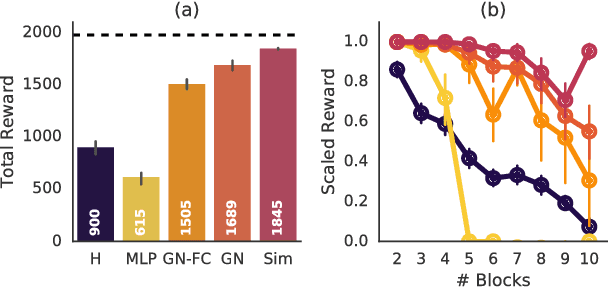
Structured agents for physical construction
May 13, 2019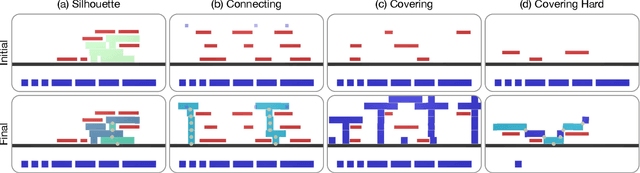
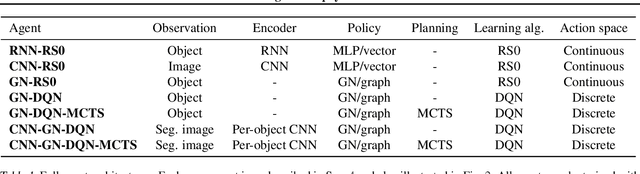
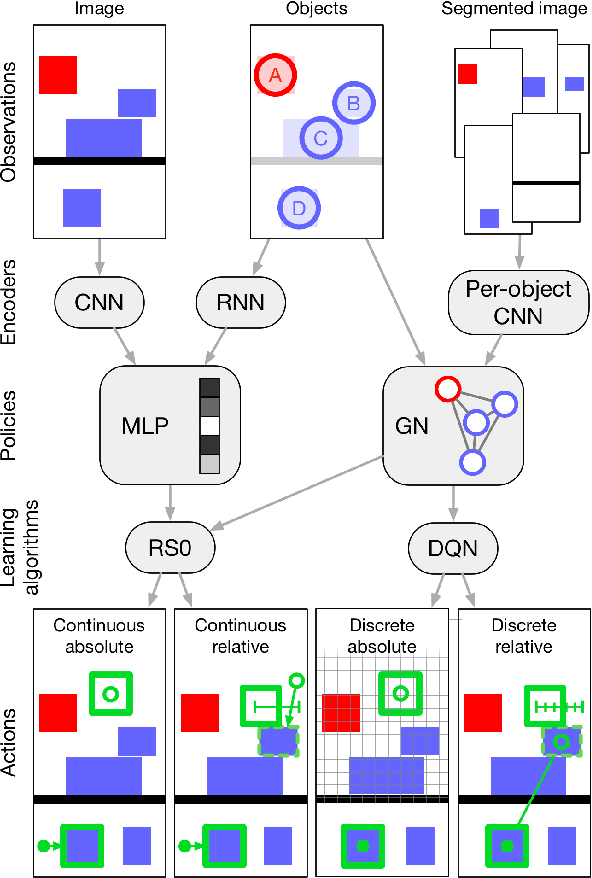
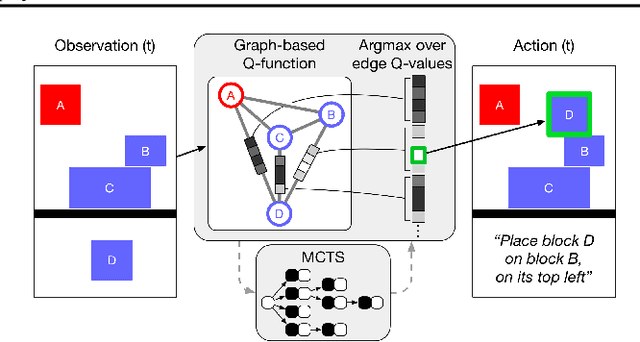
Physical construction---the ability to compose objects, subject to physical dynamics, to serve some function---is fundamental to human intelligence. We introduce a suite of challenging physical construction tasks inspired by how children play with blocks, such as matching a target configuration, stacking blocks to connect objects together, and creating shelter-like structures over target objects. We examine how a range of deep reinforcement learning agents fare on these challenges, and introduce several new approaches which provide superior performance. Our results show that agents which use structured representations (e.g., objects and scene graphs) and structured policies (e.g., object-centric actions) outperform those which use less structured representations, and generalize better beyond their training when asked to reason about larger scenes. Model-based agents which use Monte-Carlo Tree Search also outperform strictly model-free agents in our most challenging construction problems. We conclude that approaches which combine structured representations and reasoning with powerful learning are a key path toward agents that possess rich intuitive physics, scene understanding, and planning.
Relational inductive biases, deep learning, and graph networks
Oct 17, 2018
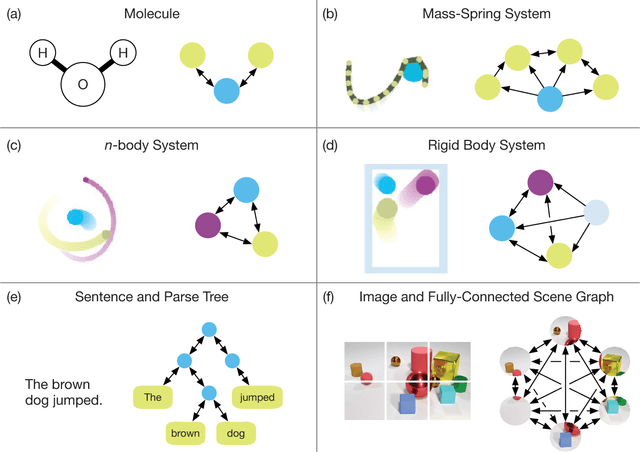
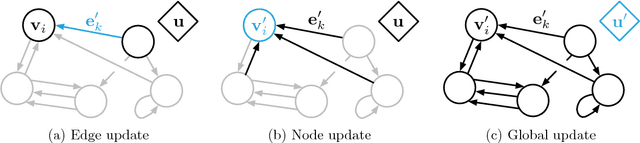
Artificial intelligence (AI) has undergone a renaissance recently, making major progress in key domains such as vision, language, control, and decision-making. This has been due, in part, to cheap data and cheap compute resources, which have fit the natural strengths of deep learning. However, many defining characteristics of human intelligence, which developed under much different pressures, remain out of reach for current approaches. In particular, generalizing beyond one's experiences--a hallmark of human intelligence from infancy--remains a formidable challenge for modern AI. The following is part position paper, part review, and part unification. We argue that combinatorial generalization must be a top priority for AI to achieve human-like abilities, and that structured representations and computations are key to realizing this objective. Just as biology uses nature and nurture cooperatively, we reject the false choice between "hand-engineering" and "end-to-end" learning, and instead advocate for an approach which benefits from their complementary strengths. We explore how using relational inductive biases within deep learning architectures can facilitate learning about entities, relations, and rules for composing them. We present a new building block for the AI toolkit with a strong relational inductive bias--the graph network--which generalizes and extends various approaches for neural networks that operate on graphs, and provides a straightforward interface for manipulating structured knowledge and producing structured behaviors. We discuss how graph networks can support relational reasoning and combinatorial generalization, laying the foundation for more sophisticated, interpretable, and flexible patterns of reasoning. As a companion to this paper, we have released an open-source software library for building graph networks, with demonstrations of how to use them in practice.
Relational Deep Reinforcement Learning
Jun 28, 2018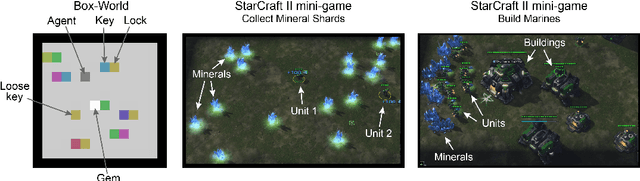
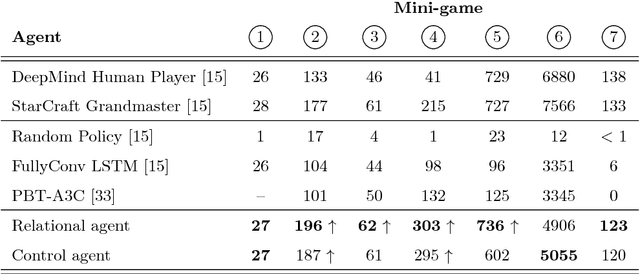
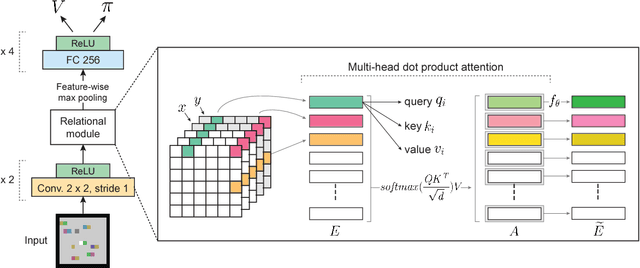
We introduce an approach for deep reinforcement learning (RL) that improves upon the efficiency, generalization capacity, and interpretability of conventional approaches through structured perception and relational reasoning. It uses self-attention to iteratively reason about the relations between entities in a scene and to guide a model-free policy. Our results show that in a novel navigation and planning task called Box-World, our agent finds interpretable solutions that improve upon baselines in terms of sample complexity, ability to generalize to more complex scenes than experienced during training, and overall performance. In the StarCraft II Learning Environment, our agent achieves state-of-the-art performance on six mini-games -- surpassing human grandmaster performance on four. By considering architectural inductive biases, our work opens new directions for overcoming important, but stubborn, challenges in deep RL.
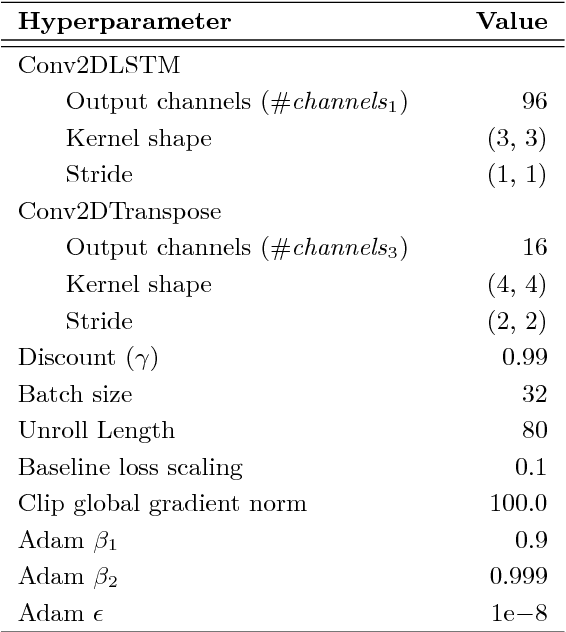
Relational inductive bias for physical construction in humans and machines
Jun 04, 2018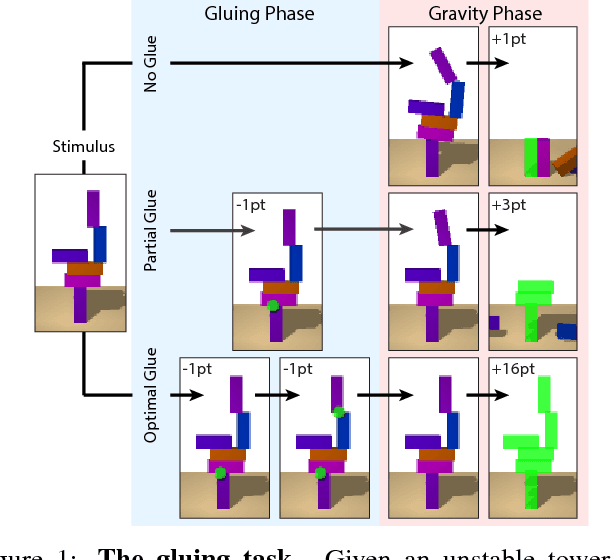
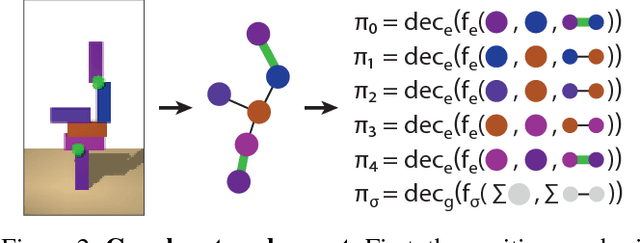
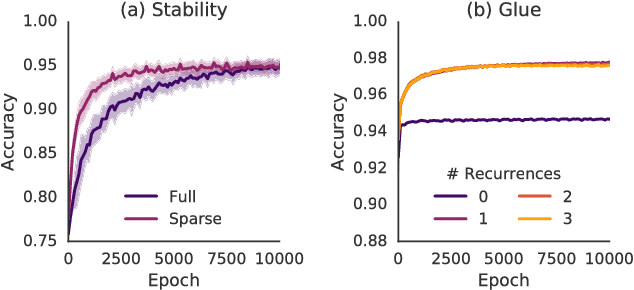
While current deep learning systems excel at tasks such as object classification, language processing, and gameplay, few can construct or modify a complex system such as a tower of blocks. We hypothesize that what these systems lack is a "relational inductive bias": a capacity for reasoning about inter-object relations and making choices over a structured description of a scene. To test this hypothesis, we focus on a task that involves gluing pairs of blocks together to stabilize a tower, and quantify how well humans perform. We then introduce a deep reinforcement learning agent which uses object- and relation-centric scene and policy representations and apply it to the task. Our results show that these structured representations allow the agent to outperform both humans and more naive approaches, suggesting that relational inductive bias is an important component in solving structured reasoning problems and for building more intelligent, flexible machines.
Hyperbolic Attention Networks
May 24, 2018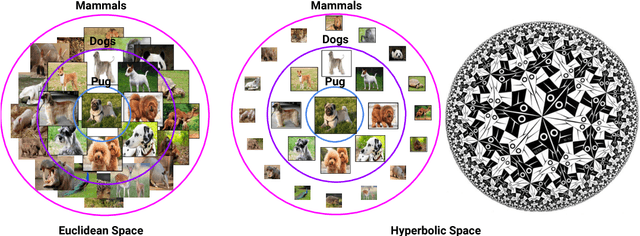
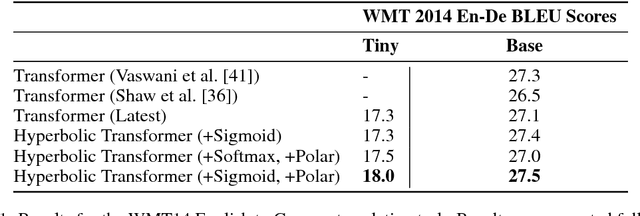
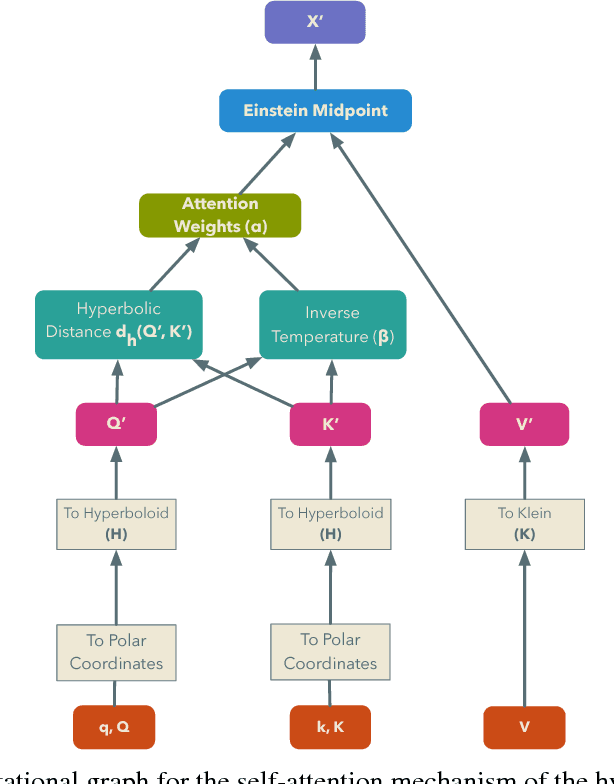
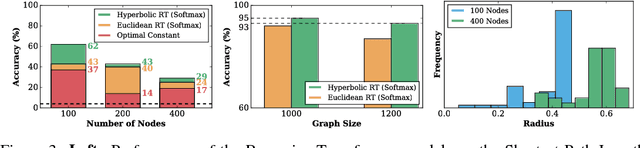
We introduce hyperbolic attention networks to endow neural networks with enough capacity to match the complexity of data with hierarchical and power-law structure. A few recent approaches have successfully demonstrated the benefits of imposing hyperbolic geometry on the parameters of shallow networks. We extend this line of work by imposing hyperbolic geometry on the activations of neural networks. This allows us to exploit hyperbolic geometry to reason about embeddings produced by deep networks. We achieve this by re-expressing the ubiquitous mechanism of soft attention in terms of operations defined for hyperboloid and Klein models. Our method shows improvements in terms of generalization on neural machine translation, learning on graphs and visual question answering tasks while keeping the neural representations compact.
Distral: Robust Multitask Reinforcement Learning
Jul 13, 2017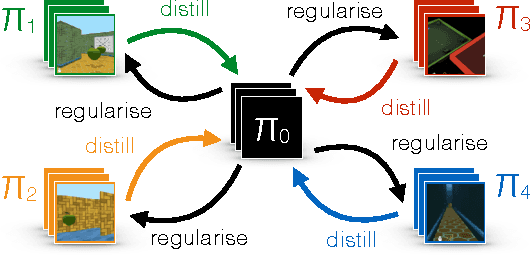
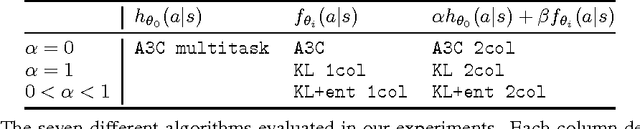
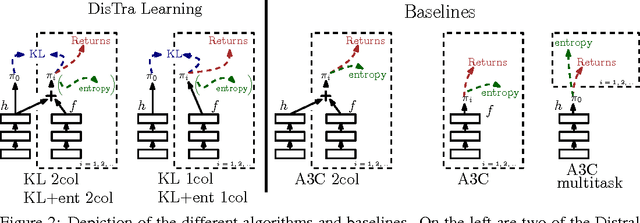
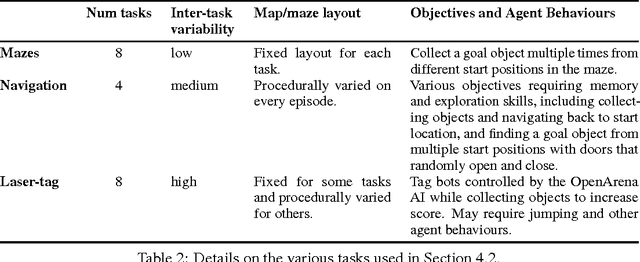
Most deep reinforcement learning algorithms are data inefficient in complex and rich environments, limiting their applicability to many scenarios. One direction for improving data efficiency is multitask learning with shared neural network parameters, where efficiency may be improved through transfer across related tasks. In practice, however, this is not usually observed, because gradients from different tasks can interfere negatively, making learning unstable and sometimes even less data efficient. Another issue is the different reward schemes between tasks, which can easily lead to one task dominating the learning of a shared model. We propose a new approach for joint training of multiple tasks, which we refer to as Distral (Distill & transfer learning). Instead of sharing parameters between the different workers, we propose to share a "distilled" policy that captures common behaviour across tasks. Each worker is trained to solve its own task while constrained to stay close to the shared policy, while the shared policy is trained by distillation to be the centroid of all task policies. Both aspects of the learning process are derived by optimizing a joint objective function. We show that our approach supports efficient transfer on complex 3D environments, outperforming several related methods. Moreover, the proposed learning process is more robust and more stable---attributes that are critical in deep reinforcement learning.