 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach for Characterizing Major Galaxy Mergers
Feb 09, 2021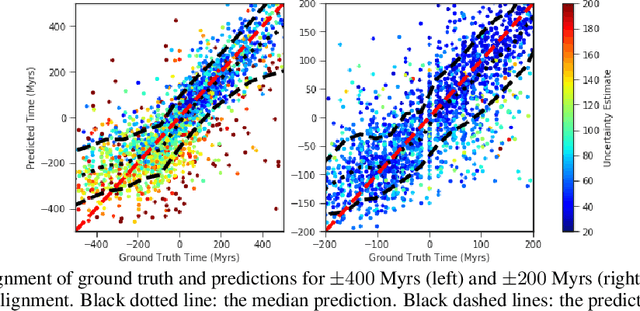

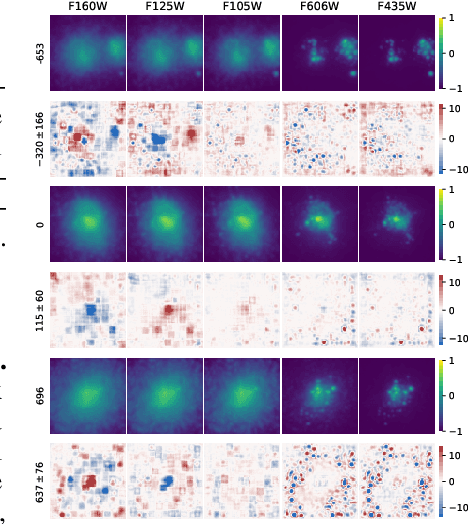
Fine-grained estimation of galaxy merger stages from observations is a key problem useful for validation of our current theoretical understanding of galaxy formation. To this end, we demonstrate a CNN-based regression model that is able to predict, for the first time, using a single image, the merger stage relative to the first perigee passage with a median error of 38.3 million years (Myrs) over a period of 400 Myrs. This model uses no specific dynamical modeling and learns only from simulated merger events. We show that our model provides reasonable estimates on real observations, approximately matching prior estimates provided by detailed dynamical modeling. We provide a preliminary interpretability analysis of our models, and demonstrate first steps toward calibrated uncertainty estimation.
Gated Linear Networks
Sep 30, 2019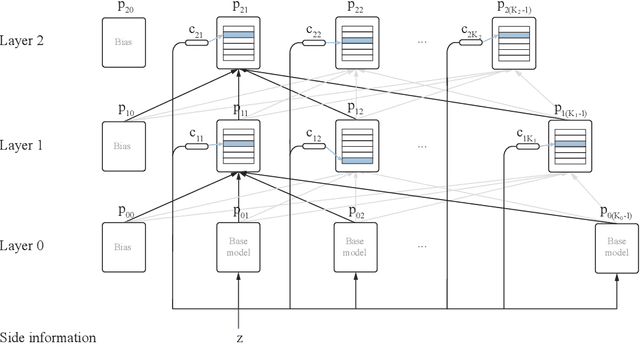
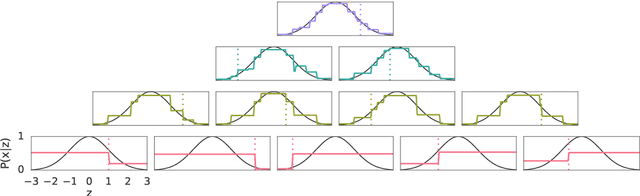
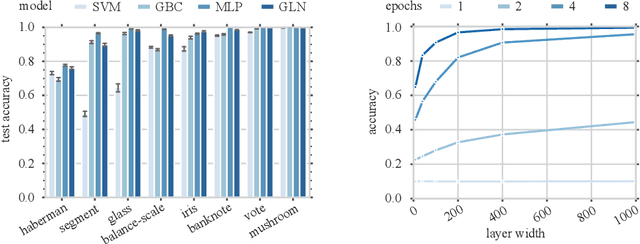
This paper presents a family of backpropagation-free neural architectures, Gated Linear Networks (GLNs),that are well suited to online learning applications where sample efficiency is of paramount importance. The impressive empirical performance of these architectures has long been known within the data compression community, but a theoretically satisfying explanation as to how and why they perform so well has proven difficult. What distinguishes these architectures from other neural systems is the distributed and local nature of their credit assignment mechanism; each neuron directly predicts the target and has its own set of hard-gated weights that are locally adapted via online convex optimization. By providing an interpretation, generalization and subsequent theoretical analysis, we show that sufficiently large GLNs are universal in a strong sense: not only can they model any compactly supported, continuous density function to arbitrary accuracy, but that any choice of no-regret online convex optimization technique will provably converge to the correct solution with enough data. Empirically we show a collection of single-pass learning results on established machine learning benchmarks that are competitive with results obtained with general purpose batch learning techniques.
Progress & Compress: A scalable framework for continual learning
Jul 02, 2018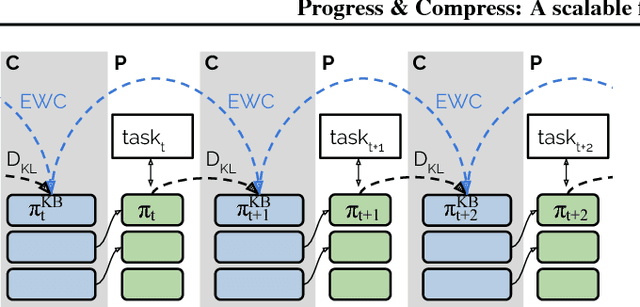
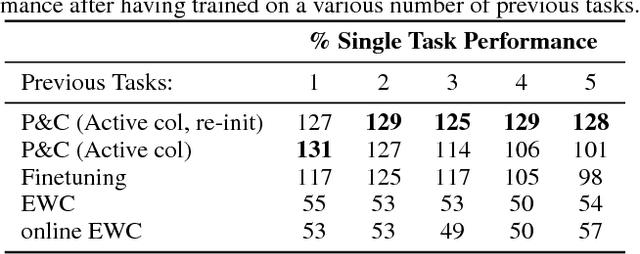
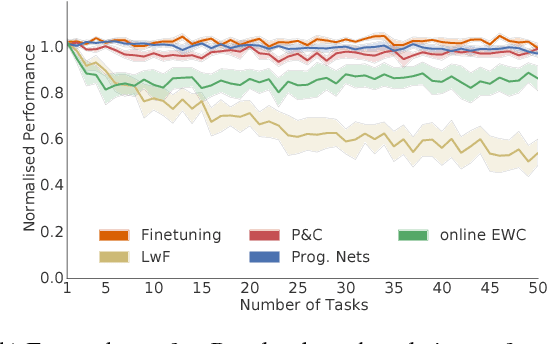

We introduce a conceptually simple and scalable framework for continual learning domains where tasks are learned sequentially. Our method is constant in the number of parameters and is designed to preserve performance on previously encountered tasks while accelerating learning progress on subsequent problems. This is achieved by training a network with two components: A knowledge base, capable of solving previously encountered problems, which is connected to an active column that is employed to efficiently learn the current task. After learning a new task, the active column is distilled into the knowledge base, taking care to protect any previously acquired skills. This cycle of active learning (progression) followed by consolidation (compression) requires no architecture growth, no access to or storing of previous data or tasks, and no task-specific parameters. We demonstrate the progress & compress approach on sequential classification of handwritten alphabets as well as two reinforcement learning domains: Atari games and 3D maze navigation.
Unsupervised Predictive Memory in a Goal-Directed Agent
Mar 28, 2018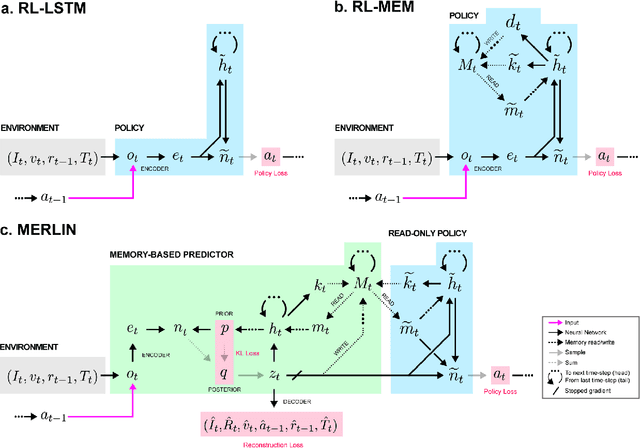
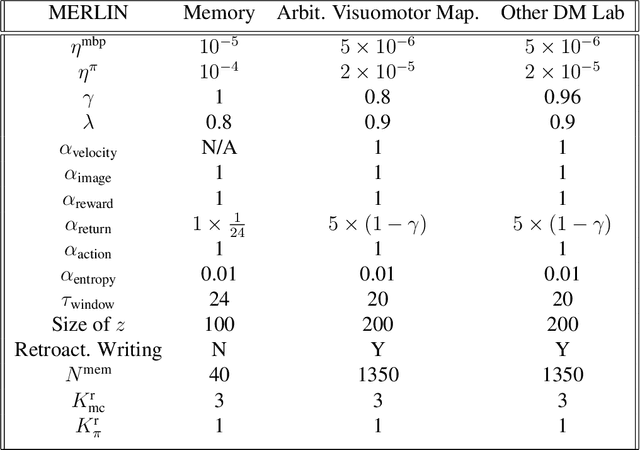
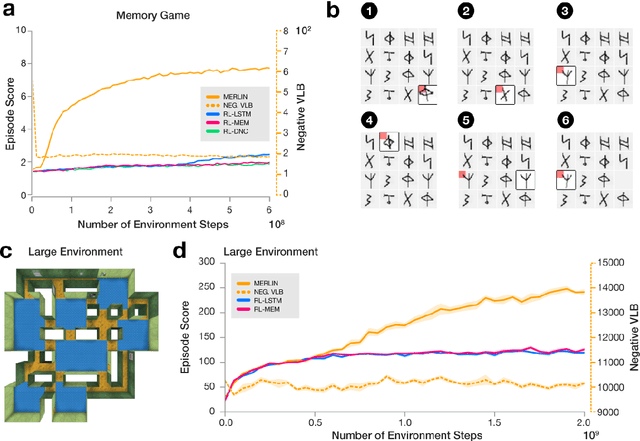
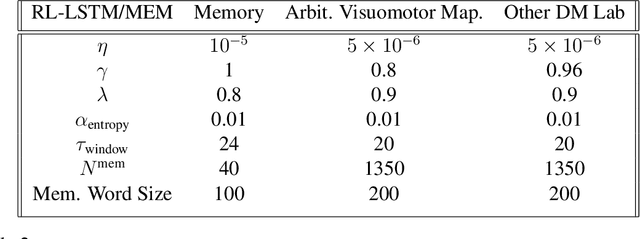
Animals execute goal-directed behaviours despite the limited range and scope of their sensors. To cope, they explore environments and store memories maintaining estimates of important information that is not presently available. Recently, progress has been made with artificial intelligence (AI) agents that learn to perform tasks from sensory input, even at a human level, by merging reinforcement learning (RL) algorithms with deep neural networks, and the excitement surrounding these results has led to the pursuit of related ideas as explanations of non-human animal learning. However, we demonstrate that contemporary RL algorithms struggle to solve simple tasks when enough information is concealed from the sensors of the agent, a property called "partial observability". An obvious requirement for handling partially observed tasks is access to extensive memory, but we show memory is not enough; it is critical that the right information be stored in the right format. We develop a model, the Memory, RL, and Inference Network (MERLIN), in which memory formation is guided by a process of predictive modeling. MERLIN facilitates the solution of tasks in 3D virtual reality environments for which partial observability is severe and memories must be maintained over long durations. Our model demonstrates a single learning agent architecture that can solve canonical behavioural tasks in psychology and neurobiology without strong simplifying assumptions about the dimensionality of sensory input or the duration of experiences.
Online Learning with Gated Linear Networks
Dec 05, 2017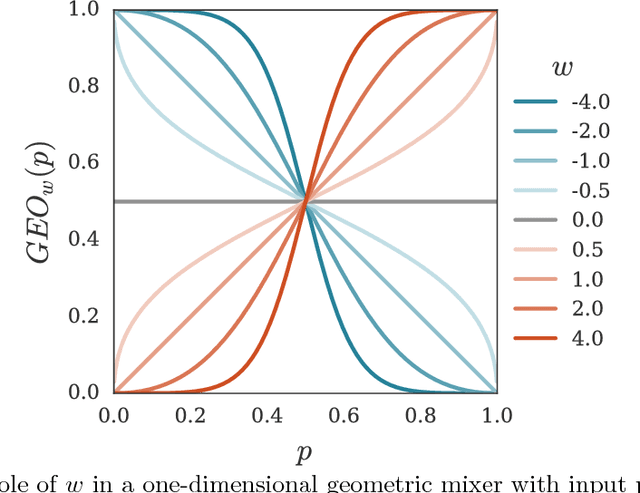
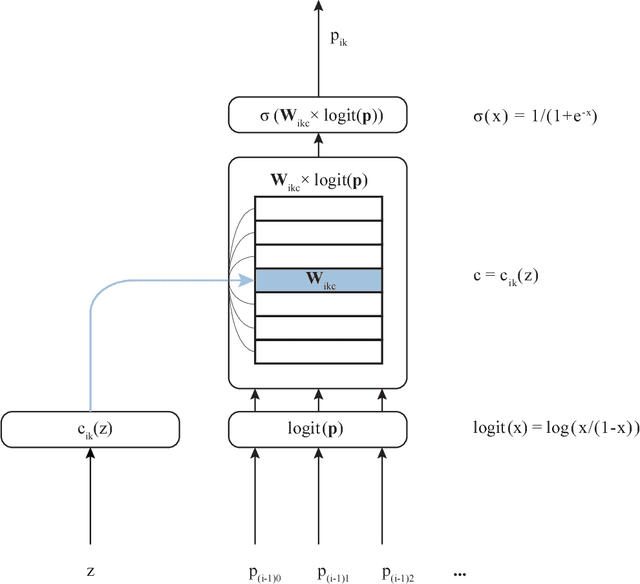
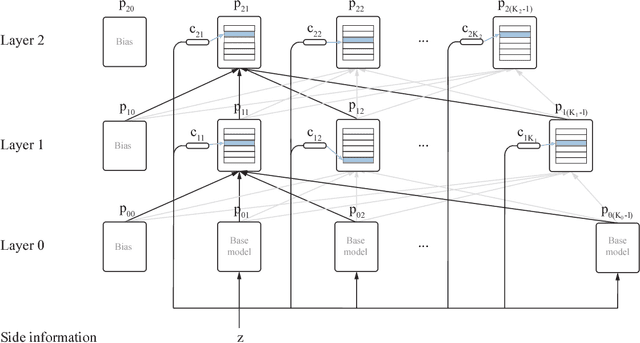
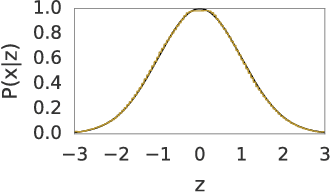
This paper describes a family of probabilistic architectures designed for online learning under the logarithmic loss. Rather than relying on non-linear transfer functions, our method gains representational power by the use of data conditioning. We state under general conditions a learnable capacity theorem that shows this approach can in principle learn any bounded Borel-measurable function on a compact subset of euclidean space; the result is stronger than many universality results for connectionist architectures because we provide both the model and the learning procedure for which convergence is guaranteed.
Overcoming catastrophic forgetting in neural networks
Jan 25, 2017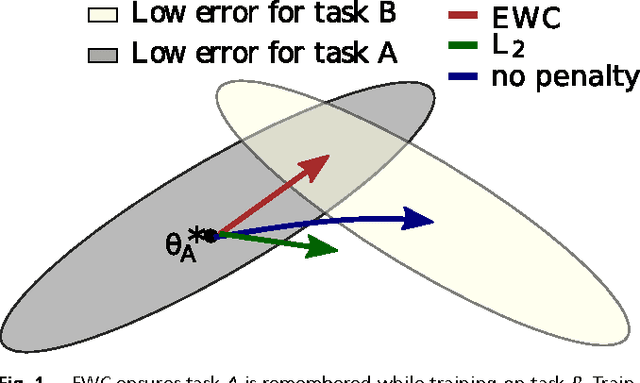
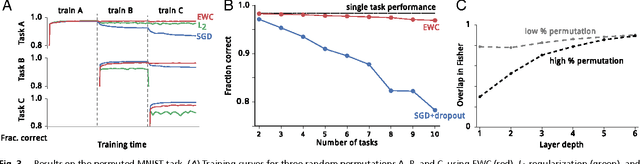
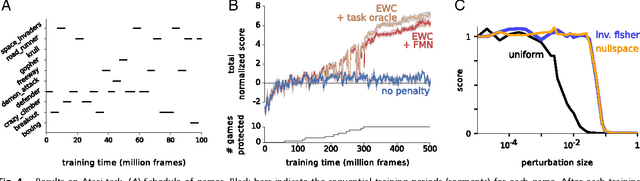
The ability to learn tasks in a sequential fashion is crucial to the development of artificial intelligence. Neural networks are not, in general, capable of this and it has been widely thought that catastrophic forgetting is an inevitable feature of connectionist models. We show that it is possible to overcome this limitation and train networks that can maintain expertise on tasks which they have not experienced for a long time. Our approach remembers old tasks by selectively slowing down learning on the weights important for those tasks. We demonstrate our approach is scalable and effective by solving a set of classification tasks based on the MNIST hand written digit dataset and by learning several Atari 2600 games sequentially.