 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitating Language via Scalable Inverse Reinforcement Learning
Sep 02, 2024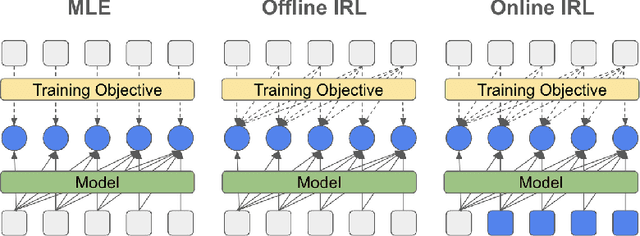
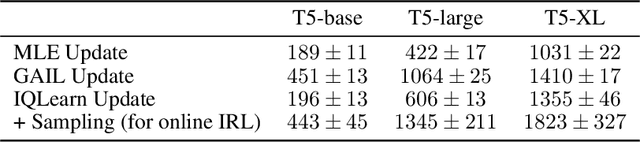
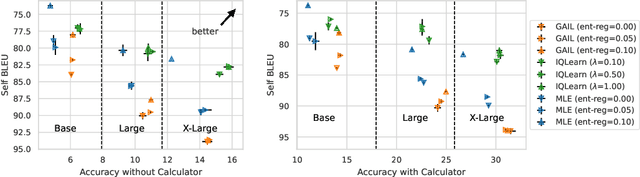

The majority of language model training builds on imitation learning. It covers pretraining, supervised fine-tuning, and affects the starting conditions for reinforcement learning from human feedback (RLHF). The simplicity and scalability of maximum likelihood estimation (MLE) for next token prediction led to its role as predominant paradigm. However, the broader field of imitation learning can more effectively utilize the sequential structure underlying autoregressive generation. We focus on investigating the inverse reinforcement learning (IRL) perspective to imitation, extracting rewards and directly optimizing sequences instead of individual token likelihoods and evaluate its benefits for fine-tuning large language models. We provide a new angle, reformulating inverse soft-Q-learning as a temporal difference regularized extension of MLE. This creates a principled connection between MLE and IRL and allows trading off added complexity with increased performance and diversity of generations in the supervised fine-tuning (SFT) setting. We find clear advantages for IRL-based imitation, in particular for retaining diversity while maximizing task performance, rendering IRL a strong alternative on fixed SFT datasets even without online data generation. Our analysis of IRL-extracted reward functions further indicates benefits for more robust reward functions via tighter integration of supervised and preference-based LLM post-training.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Hierarchical reinforcement learning with natural language subgoals
Sep 20, 2023
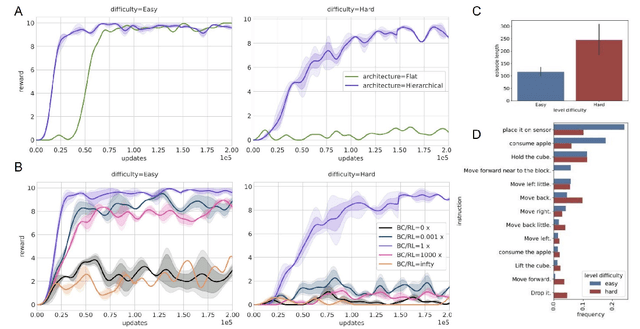
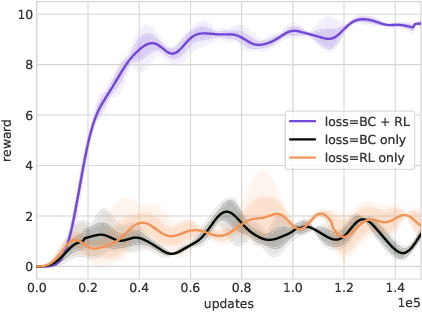
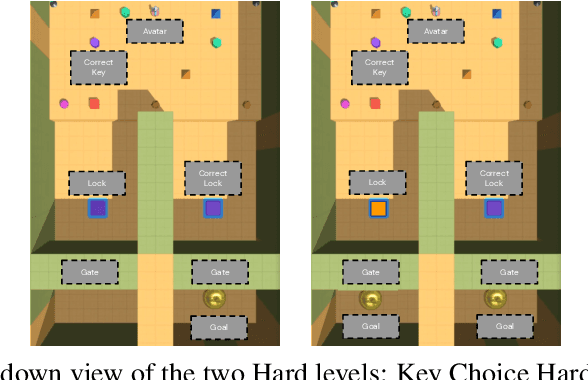
Hierarchical reinforcement learning has been a compelling approach for achieving goal directed behavior over long sequences of actions. However, it has been challenging to implement in realistic or open-ended environments. A main challenge has been to find the right space of sub-goals over which to instantiate a hierarchy. We present a novel approach where we use data from humans solving these tasks to softly supervise the goal space for a set of long range tasks in a 3D embodied environment. In particular, we use unconstrained natural language to parameterize this space. This has two advantages: first, it is easy to generate this data from naive human participants; second, it is flexible enough to represent a vast range of sub-goals in human-relevant tasks. Our approach outperforms agents that clone expert behavior on these tasks, as well as HRL from scratch without this supervised sub-goal space. Our work presents a novel approach to combining human expert supervision with the benefits and flexibility of reinforcement learning.
Collaborating with language models for embodied reasoning
Feb 01, 2023Reasoning in a complex and ambiguous environment is a key goal for Reinforcement Learning (RL) agents. While some sophisticated RL agents can successfully solve difficult tasks, they require a large amount of training data and often struggle to generalize to new unseen environments and new tasks. On the other hand, Large Scale Language Models (LSLMs) have exhibited strong reasoning ability and the ability to to adapt to new tasks through in-context learning. However, LSLMs do not inherently have the ability to interrogate or intervene on the environment. In this work, we investigate how to combine these complementary abilities in a single system consisting of three parts: a Planner, an Actor, and a Reporter. The Planner is a pre-trained language model that can issue commands to a simple embodied agent (the Actor), while the Reporter communicates with the Planner to inform its next command. We present a set of tasks that require reasoning, test this system's ability to generalize zero-shot and investigate failure cases, and demonstrate how components of this system can be trained with reinforcement-learning to improve performance.
Distilling Internet-Scale Vision-Language Models into Embodied Agents
Jan 29, 2023



Instruction-following agents must ground language into their observation and action spaces. Learning to ground language is challenging, typically requiring domain-specific engineering or large quantities of human interaction data. To address this challenge, we propose using pretrained vision-language models (VLMs) to supervise embodied agents. We combine ideas from model distillation and hindsight experience replay (HER), using a VLM to retroactively generate language describing the agent's behavior. Simple prompting allows us to control the supervision signal, teaching an agent to interact with novel objects based on their names (e.g., planes) or their features (e.g., colors) in a 3D rendered environment. Fewshot prompting lets us teach abstract category membership, including pre-existing categories (food vs toys) and ad-hoc ones (arbitrary preferences over objects). Our work outlines a new and effective way to use internet-scale VLMs, repurposing the generic language grounding acquired by such models to teach task-relevant groundings to embodied agents.
Improving Multimodal Interactive Agents with Reinforcement Learning from Human Feedback
Nov 21, 2022An important goal in artificial intelligence is to create agents that can both interact naturally with humans and learn from their feedback. Here we demonstrate how to use reinforcement learning from human feedback (RLHF) to improve upon simulated, embodied agents trained to a base level of competency with imitation learning. First, we collected data of humans interacting with agents in a simulated 3D world. We then asked annotators to record moments where they believed that agents either progressed toward or regressed from their human-instructed goal. Using this annotation data we leveraged a novel method - which we call "Inter-temporal Bradley-Terry" (IBT) modelling - to build a reward model that captures human judgments. Agents trained to optimise rewards delivered from IBT reward models improved with respect to all of our metrics, including subsequent human judgment during live interactions with agents. Altogether our results demonstrate how one can successfully leverage human judgments to improve agent behaviour, allowing us to use reinforcement learning in complex, embodied domains without programmatic reward functions. Videos of agent behaviour may be found at https://youtu.be/v_Z9F2_eKk4.
Learning to Navigate Wikipedia by Taking Random Walks
Oct 31, 2022A fundamental ability of an intelligent web-based agent is seeking out and acquiring new information. Internet search engines reliably find the correct vicinity but the top results may be a few links away from the desired target. A complementary approach is navigation via hyperlinks, employing a policy that comprehends local content and selects a link that moves it closer to the target. In this paper, we show that behavioral cloning of randomly sampled trajectories is sufficient to learn an effective link selection policy. We demonstrate the approach on a graph version of Wikipedia with 38M nodes and 387M edges. The model is able to efficiently navigate between nodes 5 and 20 steps apart 96% and 92% of the time, respectively. We then use the resulting embeddings and policy in downstream fact verification and question answering tasks where, in combination with basic TF-IDF search and ranking methods, they are competitive results to the state-of-the-art methods.
Evaluating Multimodal Interactive Agents
May 26, 2022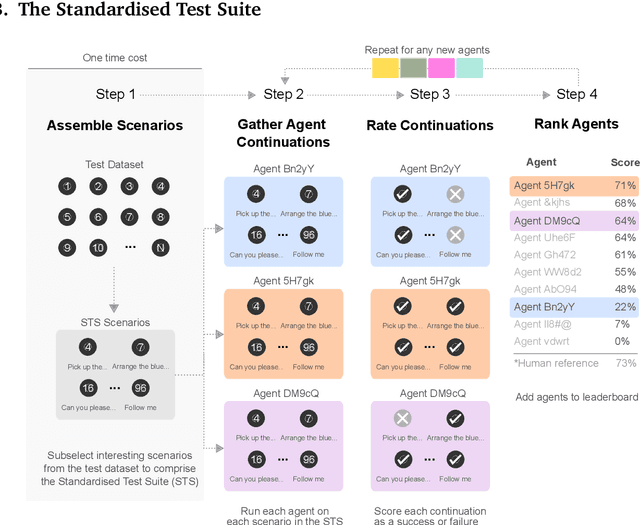
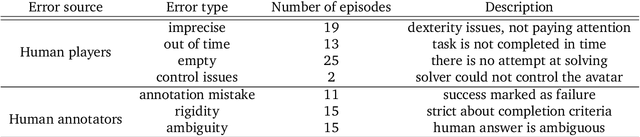
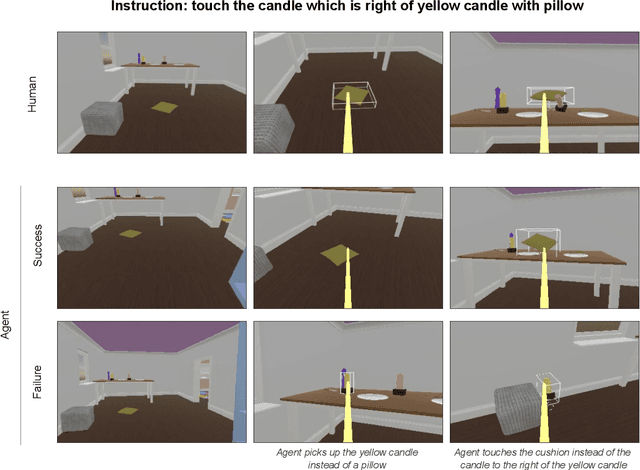

Creating agents that can interact naturally with humans is a common goal in artificial intelligence (AI) research. However, evaluating these interactions is challenging: collecting online human-agent interactions is slow and expensive, yet faster proxy metrics often do not correlate well with interactive evaluation. In this paper, we assess the merits of these existing evaluation metrics and present a novel approach to evaluation called the Standardised Test Suite (STS). The STS uses behavioural scenarios mined from real human interaction data. Agents see replayed scenario context, receive an instruction, and are then given control to complete the interaction offline. These agent continuations are recorded and sent to human annotators to mark as success or failure, and agents are ranked according to the proportion of continuations in which they succeed. The resulting STS is fast, controlled, interpretable, and representative of naturalistic interactions. Altogether, the STS consolidates much of what is desirable across many of our standard evaluation metrics, allowing us to accelerate research progress towards producing agents that can interact naturally with humans. https://youtu.be/YR1TngGORGQ
Creating Multimodal Interactive Agents with Imitation and Self-Supervised Learning
Dec 07, 2021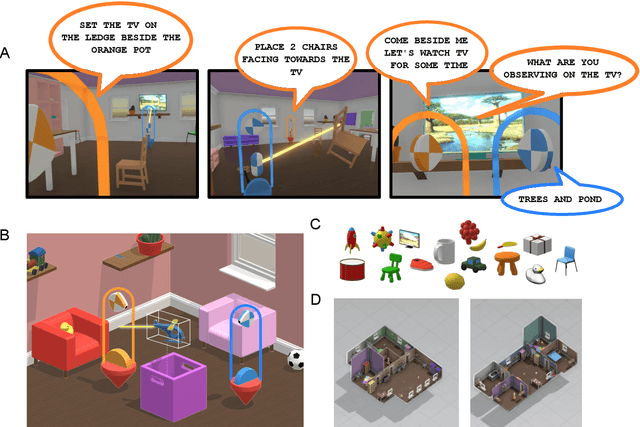
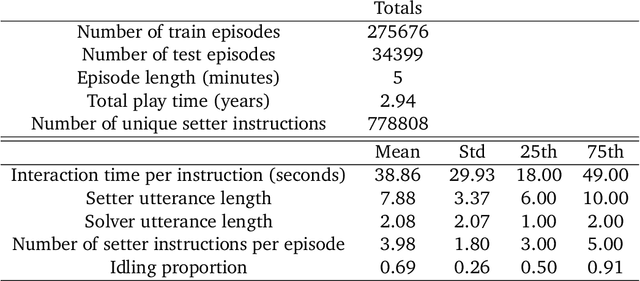
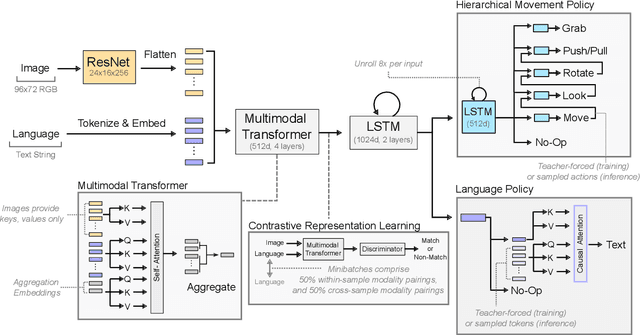
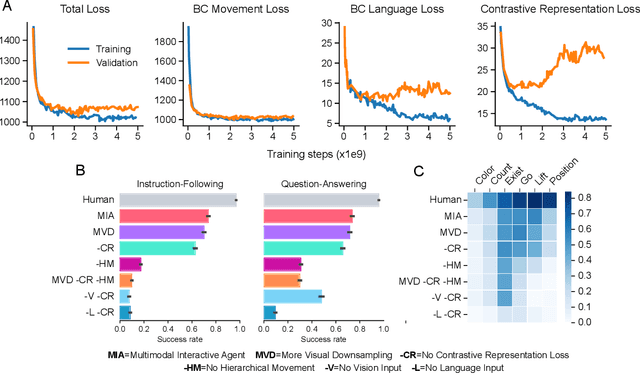
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. We show that imitation learning of human-human interactions in a simulated world, in conjunction with self-supervised learning, is sufficient to produce a multimodal interactive agent, which we call MIA, that successfully interacts with non-adversarial humans 75% of the time. We further identify architectural and algorithmic techniques that improve performance, such as hierarchical action selection. Altogether, our results demonstrate that imitation of multi-modal, real-time human behaviour may provide a straightforward and surprisingly effective means of imbuing agents with a rich behavioural prior from which agents might then be fine-tuned for specific purposes, thus laying a foundation for training capable agents for interactive robots or digital assistants. A video of MIA's behaviour may be found at https://youtu.be/ZFgRhviF7mY