 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBolt3D: Generating 3D Scenes in Seconds
Mar 18, 2025We present a latent diffusion model for fast feed-forward 3D scene generation. Given one or more images, our model Bolt3D directly samples a 3D scene representation in less than seven seconds on a single GPU. We achieve this by leveraging powerful and scalable existing 2D diffusion network architectures to produce consistent high-fidelity 3D scene representations. To train this model, we create a large-scale multiview-consistent dataset of 3D geometry and appearance by applying state-of-the-art dense 3D reconstruction techniques to existing multiview image datasets. Compared to prior multiview generative models that require per-scene optimization for 3D reconstruction, Bolt3D reduces the inference cost by a factor of up to 300 times.
CAT3D: Create Anything in 3D with Multi-View Diffusion Models
May 16, 2024



Advances in 3D reconstruction have enabled high-quality 3D capture, but require a user to collect hundreds to thousands of images to create a 3D scene. We present CAT3D, a method for creating anything in 3D by simulating this real-world capture process with a multi-view diffusion model. Given any number of input images and a set of target novel viewpoints, our model generates highly consistent novel views of a scene. These generated views can be used as input to robust 3D reconstruction techniques to produce 3D representations that can be rendered from any viewpoint in real-time. CAT3D can create entire 3D scenes in as little as one minute, and outperforms existing methods for single image and few-view 3D scene creation. See our project page for results and interactive demos at https://cat3d.github.io .
NeRF2Real: Sim2real Transfer of Vision-guided Bipedal Motion Skills using Neural Radiance Fields
Oct 10, 2022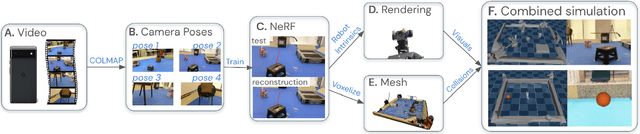
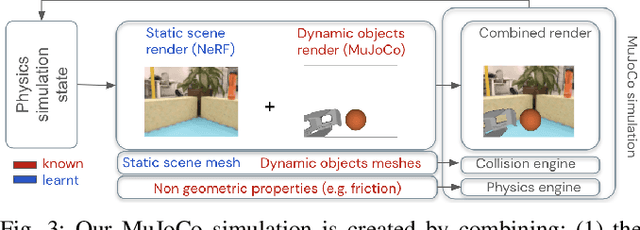
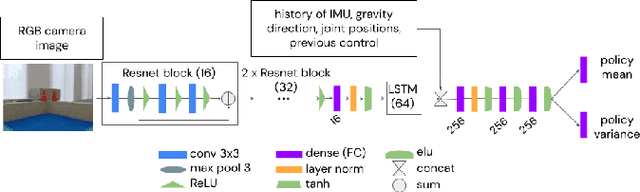
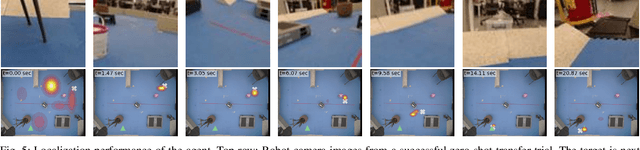
We present a system for applying sim2real approaches to "in the wild" scenes with realistic visuals, and to policies which rely on active perception using RGB cameras. Given a short video of a static scene collected using a generic phone, we learn the scene's contact geometry and a function for novel view synthesis using a Neural Radiance Field (NeRF). We augment the NeRF rendering of the static scene by overlaying the rendering of other dynamic objects (e.g. the robot's own body, a ball). A simulation is then created using the rendering engine in a physics simulator which computes contact dynamics from the static scene geometry (estimated from the NeRF volume density) and the dynamic objects' geometry and physical properties (assumed known). We demonstrate that we can use this simulation to learn vision-based whole body navigation and ball pushing policies for a 20 degrees of freedom humanoid robot with an actuated head-mounted RGB camera, and we successfully transfer these policies to a real robot. Project video is available at https://sites.google.com/view/nerf2real/home
Creating Multimodal Interactive Agents with Imitation and Self-Supervised Learning
Dec 07, 2021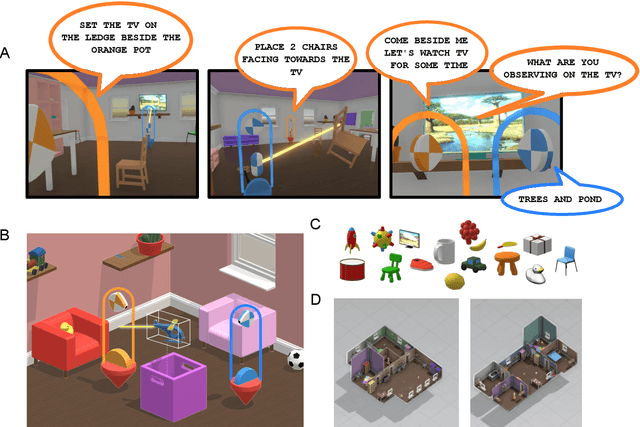
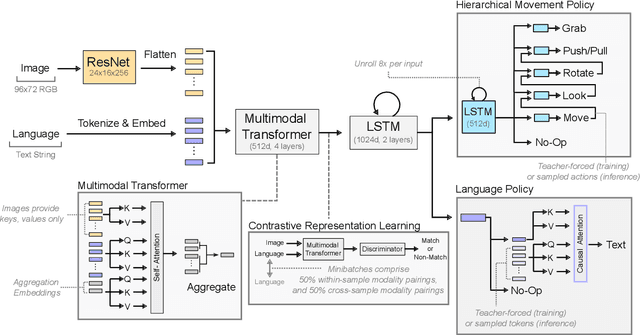
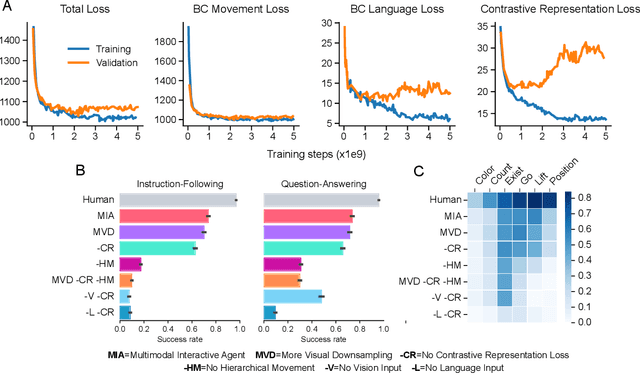
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. We show that imitation learning of human-human interactions in a simulated world, in conjunction with self-supervised learning, is sufficient to produce a multimodal interactive agent, which we call MIA, that successfully interacts with non-adversarial humans 75% of the time. We further identify architectural and algorithmic techniques that improve performance, such as hierarchical action selection. Altogether, our results demonstrate that imitation of multi-modal, real-time human behaviour may provide a straightforward and surprisingly effective means of imbuing agents with a rich behavioural prior from which agents might then be fine-tuned for specific purposes, thus laying a foundation for training capable agents for interactive robots or digital assistants. A video of MIA's behaviour may be found at https://youtu.be/ZFgRhviF7mY
Imitating Interactive Intelligence
Jan 21, 2021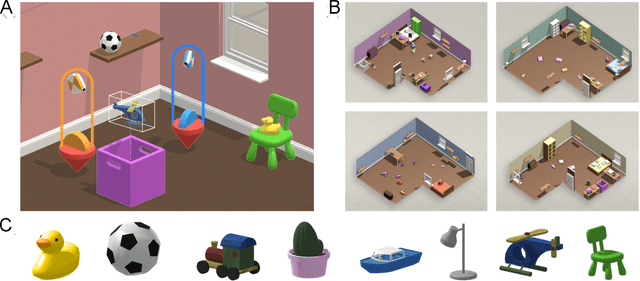
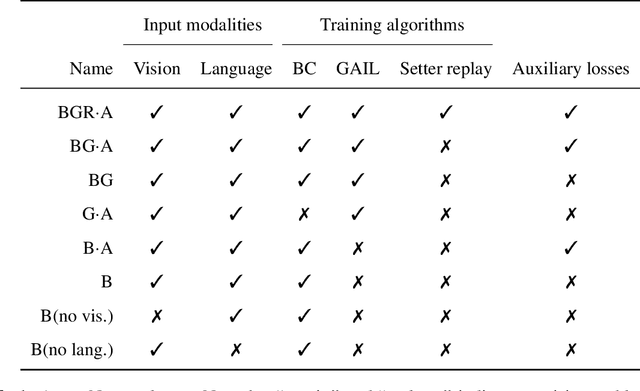
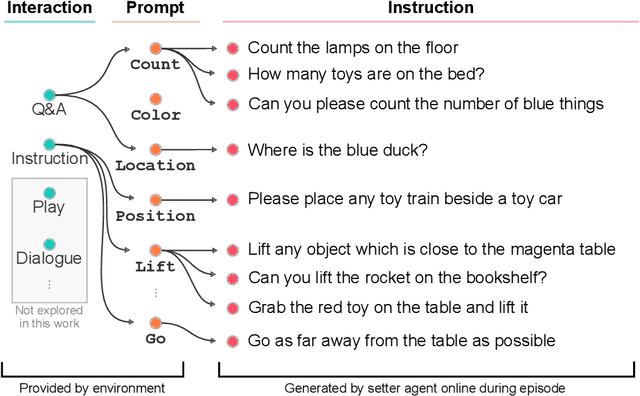
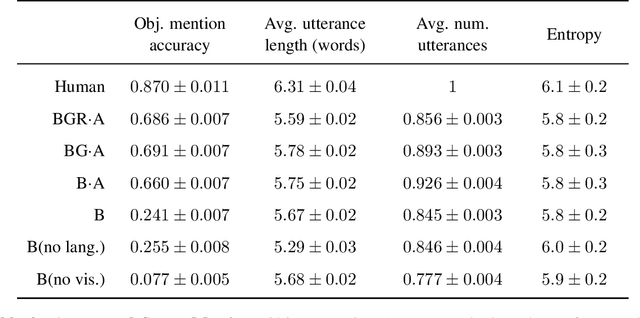
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. This setting nevertheless integrates a number of the central challenges of artificial intelligence (AI) research: complex visual perception and goal-directed physical control, grounded language comprehension and production, and multi-agent social interaction. To build agents that can robustly interact with humans, we would ideally train them while they interact with humans. However, this is presently impractical. Therefore, we approximate the role of the human with another learned agent, and use ideas from inverse reinforcement learning to reduce the disparities between human-human and agent-agent interactive behaviour. Rigorously evaluating our agents poses a great challenge, so we develop a variety of behavioural tests, including evaluation by humans who watch videos of agents or interact directly with them. These evaluations convincingly demonstrate that interactive training and auxiliary losses improve agent behaviour beyond what is achieved by supervised learning of actions alone. Further, we demonstrate that agent capabilities generalise beyond literal experiences in the dataset. Finally, we train evaluation models whose ratings of agents agree well with human judgement, thus permitting the evaluation of new agent models without additional effort. Taken together, our results in this virtual environment provide evidence that large-scale human behavioural imitation is a promising tool to create intelligent, interactive agents, and the challenge of reliably evaluating such agents is possible to surmount.