 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCityRAG: Stepping Into a City via Spatially-Grounded Video Generation
Apr 21, 2026We address the problem of generating a 3D-consistent, navigable environment that is spatially grounded: a simulation of a real location. Existing video generative models can produce a plausible sequence that is consistent with a text (T2V) or image (I2V) prompt. However, the capability to reconstruct the real world under arbitrary weather conditions and dynamic object configurations is essential for downstream applications including autonomous driving and robotics simulation. To this end, we present CityRAG, a video generative model that leverages large corpora of geo-registered data as context to ground generation to the physical scene, while maintaining learned priors for complex motion and appearance changes. CityRAG relies on temporally unaligned training data, which teaches the model to semantically disentangle the underlying scene from its transient attributes. Our experiments demonstrate that CityRAG can generate coherent minutes-long, physically grounded video sequences, maintain weather and lighting conditions over thousands of frames, achieve loop closure, and navigate complex trajectories to reconstruct real-world geography.
UFO-4D: Unposed Feedforward 4D Reconstruction from Two Images
Mar 05, 2026Dense 4D reconstruction from unposed images remains a critical challenge, with current methods relying on slow test-time optimization or fragmented, task-specific feedforward models. We introduce UFO-4D, a unified feedforward framework to reconstruct a dense, explicit 4D representation from just a pair of unposed images. UFO-4D directly estimates dynamic 3D Gaussian Splats, enabling the joint and consistent estimation of 3D geometry, 3D motion, and camera pose in a feedforward manner. Our core insight is that differentiably rendering multiple signals from a single Dynamic 3D Gaussian representation offers major training advantages. This approach enables a self-supervised image synthesis loss while tightly coupling appearance, depth, and motion. Since all modalities share the same geometric primitives, supervising one inherently regularizes and improves the others. This synergy overcomes data scarcity, allowing UFO-4D to outperform prior work by up to 3 times in joint geometry, motion, and camera pose estimation. Our representation also enables high-fidelity 4D interpolation across novel views and time. Please visit our project page for visual results: https://ufo-4d.github.io/
GR3EN: Generative Relighting for 3D Environments
Jan 22, 2026We present a method for relighting 3D reconstructions of large room-scale environments. Existing solutions for 3D scene relighting often require solving under-determined or ill-conditioned inverse rendering problems, and are as such unable to produce high-quality results on complex real-world scenes. Though recent progress in using generative image and video diffusion models for relighting has been promising, these techniques are either limited to 2D image and video relighting or 3D relighting of individual objects. Our approach enables controllable 3D relighting of room-scale scenes by distilling the outputs of a video-to-video relighting diffusion model into a 3D reconstruction. This side-steps the need to solve a difficult inverse rendering problem, and results in a flexible system that can relight 3D reconstructions of complex real-world scenes. We validate our approach on both synthetic and real-world datasets to show that it can faithfully render novel views of scenes under new lighting conditions.
VLIC: Vision-Language Models As Perceptual Judges for Human-Aligned Image Compression
Dec 17, 2025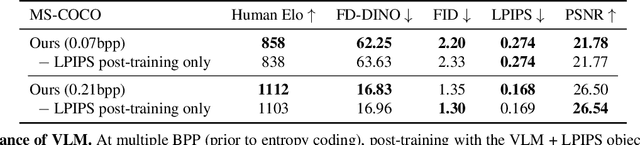
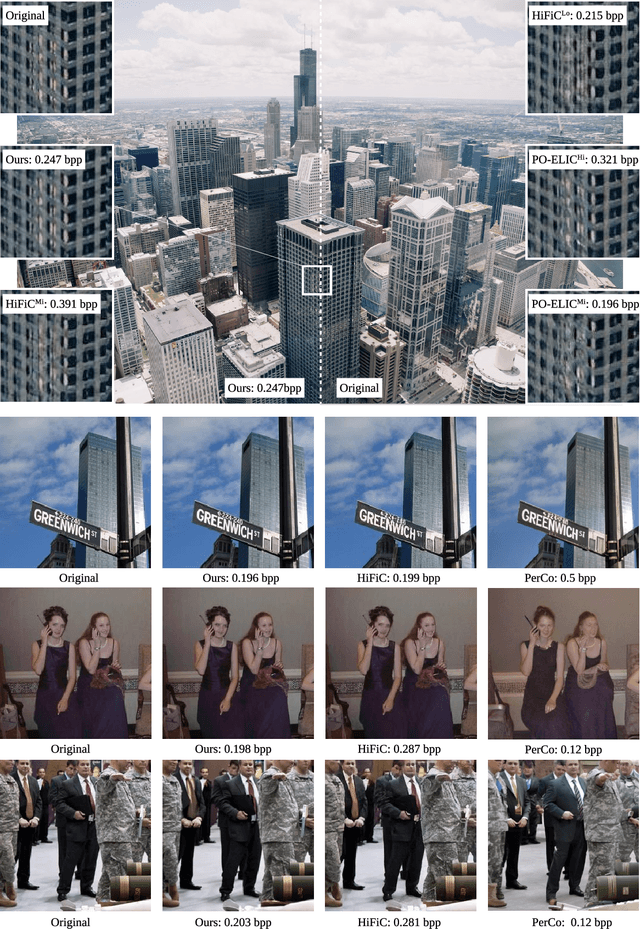
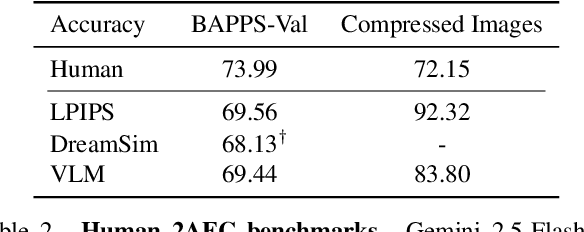
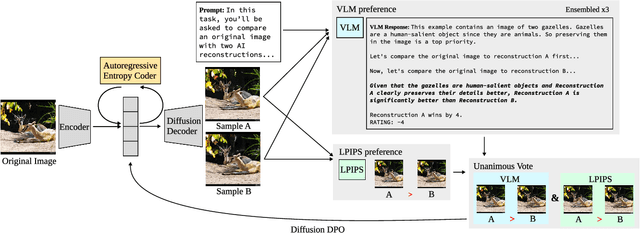
Evaluations of image compression performance which include human preferences have generally found that naive distortion functions such as MSE are insufficiently aligned to human perception. In order to align compression models to human perception, prior work has employed differentiable perceptual losses consisting of neural networks calibrated on large-scale datasets of human psycho-visual judgments. We show that, surprisingly, state-of-the-art vision-language models (VLMs) can replicate binary human two-alternative forced choice (2AFC) judgments zero-shot when asked to reason about the differences between pairs of images. Motivated to exploit the powerful zero-shot visual reasoning capabilities of VLMs, we propose Vision-Language Models for Image Compression (VLIC), a diffusion-based image compression system designed to be post-trained with binary VLM judgments. VLIC leverages existing techniques for diffusion model post-training with preferences, rather than distilling the VLM judgments into a separate perceptual loss network. We show that calibrating this system on VLM judgments produces competitive or state-of-the-art performance on human-aligned visual compression depending on the dataset, according to perceptual metrics and large-scale user studies. We additionally conduct an extensive analysis of the VLM-based reward design and training procedure and share important insights. More visuals are available at https://kylesargent.github.io/vlic
Bolt3D: Generating 3D Scenes in Seconds
Mar 18, 2025We present a latent diffusion model for fast feed-forward 3D scene generation. Given one or more images, our model Bolt3D directly samples a 3D scene representation in less than seven seconds on a single GPU. We achieve this by leveraging powerful and scalable existing 2D diffusion network architectures to produce consistent high-fidelity 3D scene representations. To train this model, we create a large-scale multiview-consistent dataset of 3D geometry and appearance by applying state-of-the-art dense 3D reconstruction techniques to existing multiview image datasets. Compared to prior multiview generative models that require per-scene optimization for 3D reconstruction, Bolt3D reduces the inference cost by a factor of up to 300 times.
CubeDiff: Repurposing Diffusion-Based Image Models for Panorama Generation
Jan 28, 2025We introduce a novel method for generating 360{\deg} panoramas from text prompts or images. Our approach leverages recent advances in 3D generation by employing multi-view diffusion models to jointly synthesize the six faces of a cubemap. Unlike previous methods that rely on processing equirectangular projections or autoregressive generation, our method treats each face as a standard perspective image, simplifying the generation process and enabling the use of existing multi-view diffusion models. We demonstrate that these models can be adapted to produce high-quality cubemaps without requiring correspondence-aware attention layers. Our model allows for fine-grained text control, generates high resolution panorama images and generalizes well beyond its training set, whilst achieving state-of-the-art results, both qualitatively and quantitatively. Project page: https://cubediff.github.io/
Can Generative Video Models Help Pose Estimation?
Dec 20, 2024Pairwise pose estimation from images with little or no overlap is an open challenge in computer vision. Existing methods, even those trained on large-scale datasets, struggle in these scenarios due to the lack of identifiable correspondences or visual overlap. Inspired by the human ability to infer spatial relationships from diverse scenes, we propose a novel approach, InterPose, that leverages the rich priors encoded within pre-trained generative video models. We propose to use a video model to hallucinate intermediate frames between two input images, effectively creating a dense, visual transition, which significantly simplifies the problem of pose estimation. Since current video models can still produce implausible motion or inconsistent geometry, we introduce a self-consistency score that evaluates the consistency of pose predictions from sampled videos. We demonstrate that our approach generalizes among three state-of-the-art video models and show consistent improvements over the state-of-the-art DUSt3R on four diverse datasets encompassing indoor, outdoor, and object-centric scenes. Our findings suggest a promising avenue for improving pose estimation models by leveraging large generative models trained on vast amounts of video data, which is more readily available than 3D data. See our project page for results: https://inter-pose.github.io/.
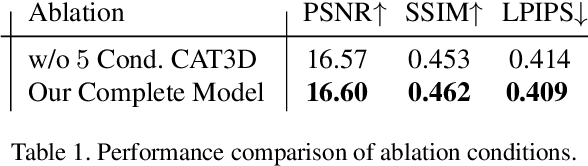
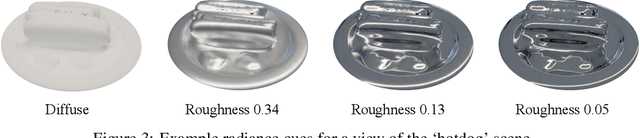
Generative Multiview Relighting for 3D Reconstruction under Extreme Illumination Variation
Dec 19, 2024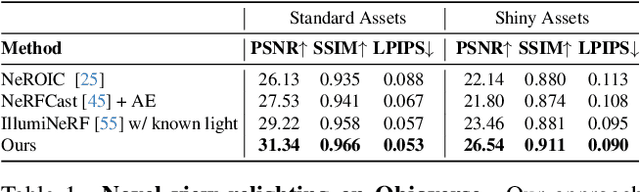
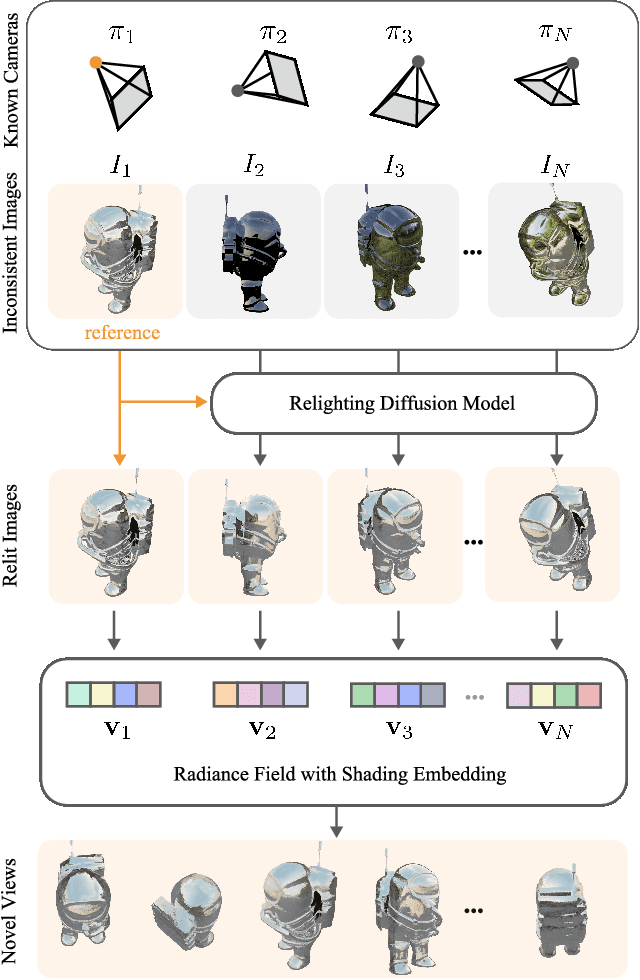
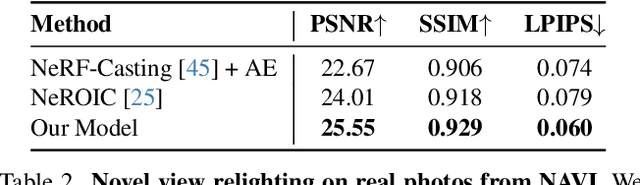
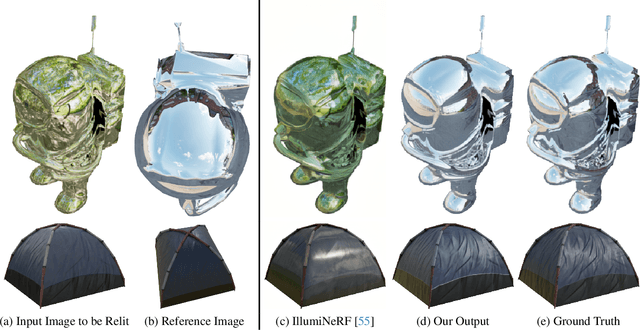
Reconstructing the geometry and appearance of objects from photographs taken in different environments is difficult as the illumination and therefore the object appearance vary across captured images. This is particularly challenging for more specular objects whose appearance strongly depends on the viewing direction. Some prior approaches model appearance variation across images using a per-image embedding vector, while others use physically-based rendering to recover the materials and per-image illumination. Such approaches fail at faithfully recovering view-dependent appearance given significant variation in input illumination and tend to produce mostly diffuse results. We present an approach that reconstructs objects from images taken under different illuminations by first relighting the images under a single reference illumination with a multiview relighting diffusion model and then reconstructing the object's geometry and appearance with a radiance field architecture that is robust to the small remaining inconsistencies among the relit images. We validate our proposed approach on both synthetic and real datasets and demonstrate that it greatly outperforms existing techniques at reconstructing high-fidelity appearance from images taken under extreme illumination variation. Moreover, our approach is particularly effective at recovering view-dependent "shiny" appearance which cannot be reconstructed by prior methods.
SimVS: Simulating World Inconsistencies for Robust View Synthesis
Dec 10, 2024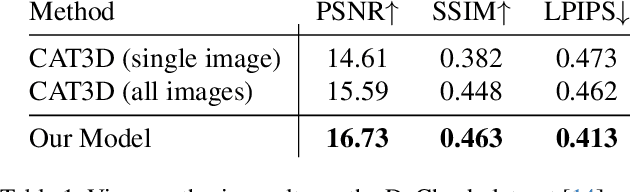


Novel-view synthesis techniques achieve impressive results for static scenes but struggle when faced with the inconsistencies inherent to casual capture settings: varying illumination, scene motion, and other unintended effects that are difficult to model explicitly. We present an approach for leveraging generative video models to simulate the inconsistencies in the world that can occur during capture. We use this process, along with existing multi-view datasets, to create synthetic data for training a multi-view harmonization network that is able to reconcile inconsistent observations into a consistent 3D scene. We demonstrate that our world-simulation strategy significantly outperforms traditional augmentation methods in handling real-world scene variations, thereby enabling highly accurate static 3D reconstructions in the presence of a variety of challenging inconsistencies. Project page: https://alextrevithick.github.io/simvs
IllumiNeRF: 3D Relighting without Inverse Rendering
Jun 10, 2024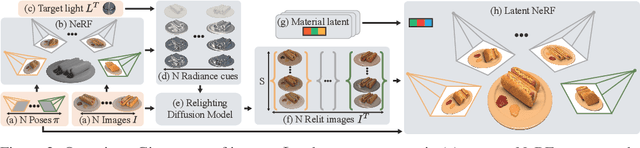


Existing methods for relightable view synthesis -- using a set of images of an object under unknown lighting to recover a 3D representation that can be rendered from novel viewpoints under a target illumination -- are based on inverse rendering, and attempt to disentangle the object geometry, materials, and lighting that explain the input images. Furthermore, this typically involves optimization through differentiable Monte Carlo rendering, which is brittle and computationally-expensive. In this work, we propose a simpler approach: we first relight each input image using an image diffusion model conditioned on lighting and then reconstruct a Neural Radiance Field (NeRF) with these relit images, from which we render novel views under the target lighting. We demonstrate that this strategy is surprisingly competitive and achieves state-of-the-art results on multiple relighting benchmarks. Please see our project page at https://illuminerf.github.io/.