 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoPartGen: Autogressive 3D Part Generation and Discovery
Jul 17, 2025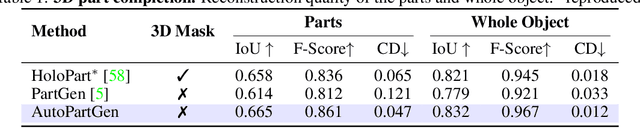
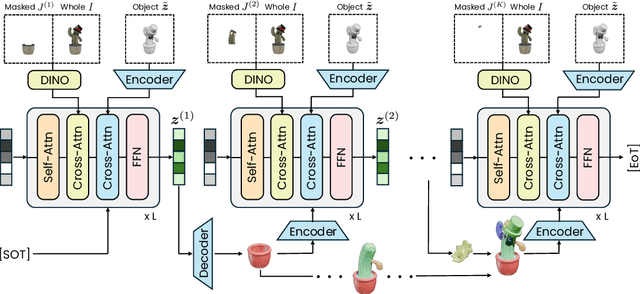

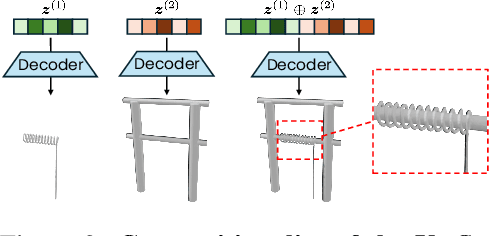
We introduce AutoPartGen, a model that generates objects composed of 3D parts in an autoregressive manner. This model can take as input an image of an object, 2D masks of the object's parts, or an existing 3D object, and generate a corresponding compositional 3D reconstruction. Our approach builds upon 3DShape2VecSet, a recent latent 3D representation with powerful geometric expressiveness. We observe that this latent space exhibits strong compositional properties, making it particularly well-suited for part-based generation tasks. Specifically, AutoPartGen generates object parts autoregressively, predicting one part at a time while conditioning on previously generated parts and additional inputs, such as 2D images, masks, or 3D objects. This process continues until the model decides that all parts have been generated, thus determining automatically the type and number of parts. The resulting parts can be seamlessly assembled into coherent objects or scenes without requiring additional optimization. We evaluate both the overall 3D generation capabilities and the part-level generation quality of AutoPartGen, demonstrating that it achieves state-of-the-art performance in 3D part generation.
Twinner: Shining Light on Digital Twins in a Few Snaps
Mar 11, 2025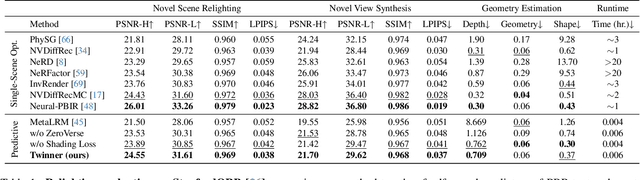
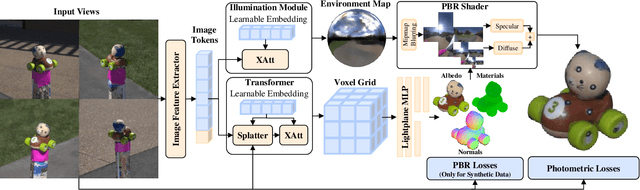
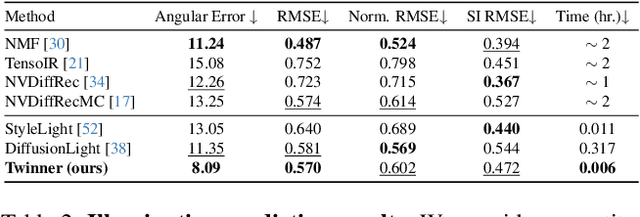
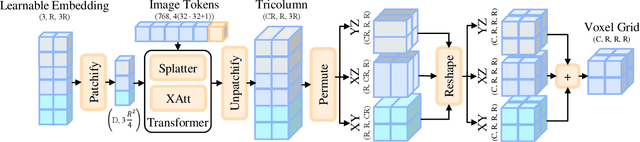
We present the first large reconstruction model, Twinner, capable of recovering a scene's illumination as well as an object's geometry and material properties from only a few posed images. Twinner is based on the Large Reconstruction Model and innovates in three key ways: 1) We introduce a memory-efficient voxel-grid transformer whose memory scales only quadratically with the size of the voxel grid. 2) To deal with scarcity of high-quality ground-truth PBR-shaded models, we introduce a large fully-synthetic dataset of procedurally-generated PBR-textured objects lit with varied illumination. 3) To narrow the synthetic-to-real gap, we finetune the model on real life datasets by means of a differentiable physically-based shading model, eschewing the need for ground-truth illumination or material properties which are challenging to obtain in real life. We demonstrate the efficacy of our model on the real life StanfordORB benchmark where, given few input views, we achieve reconstruction quality significantly superior to existing feedforward reconstruction networks, and comparable to significantly slower per-scene optimization methods.
UnCommon Objects in 3D
Jan 13, 2025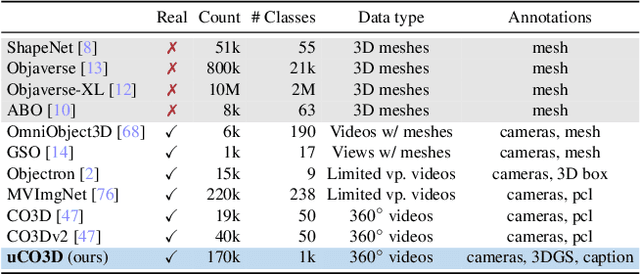
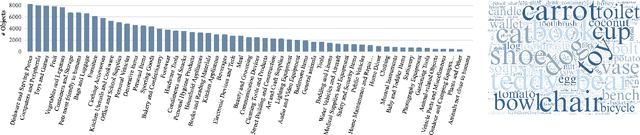
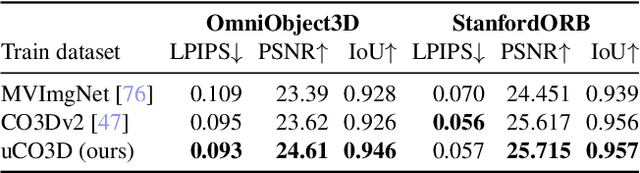
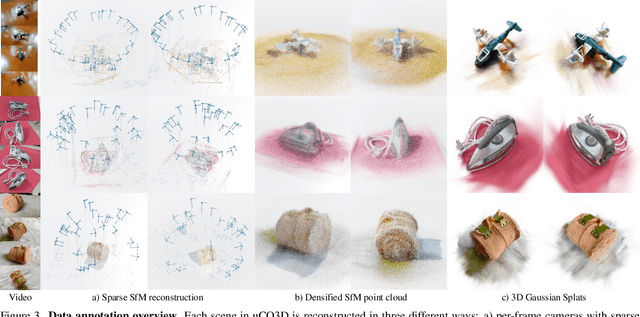
We introduce Uncommon Objects in 3D (uCO3D), a new object-centric dataset for 3D deep learning and 3D generative AI. uCO3D is the largest publicly-available collection of high-resolution videos of objects with 3D annotations that ensures full-360$^{\circ}$ coverage. uCO3D is significantly more diverse than MVImgNet and CO3Dv2, covering more than 1,000 object categories. It is also of higher quality, due to extensive quality checks of both the collected videos and the 3D annotations. Similar to analogous datasets, uCO3D contains annotations for 3D camera poses, depth maps and sparse point clouds. In addition, each object is equipped with a caption and a 3D Gaussian Splat reconstruction. We train several large 3D models on MVImgNet, CO3Dv2, and uCO3D and obtain superior results using the latter, showing that uCO3D is better for learning applications.
PartGen: Part-level 3D Generation and Reconstruction with Multi-View Diffusion Models
Dec 24, 2024



Text- or image-to-3D generators and 3D scanners can now produce 3D assets with high-quality shapes and textures. These assets typically consist of a single, fused representation, like an implicit neural field, a Gaussian mixture, or a mesh, without any useful structure. However, most applications and creative workflows require assets to be made of several meaningful parts that can be manipulated independently. To address this gap, we introduce PartGen, a novel approach that generates 3D objects composed of meaningful parts starting from text, an image, or an unstructured 3D object. First, given multiple views of a 3D object, generated or rendered, a multi-view diffusion model extracts a set of plausible and view-consistent part segmentations, dividing the object into parts. Then, a second multi-view diffusion model takes each part separately, fills in the occlusions, and uses those completed views for 3D reconstruction by feeding them to a 3D reconstruction network. This completion process considers the context of the entire object to ensure that the parts integrate cohesively. The generative completion model can make up for the information missing due to occlusions; in extreme cases, it can hallucinate entirely invisible parts based on the input 3D asset. We evaluate our method on generated and real 3D assets and show that it outperforms segmentation and part-extraction baselines by a large margin. We also showcase downstream applications such as 3D part editing.
Meta 3D Gen
Jul 02, 2024
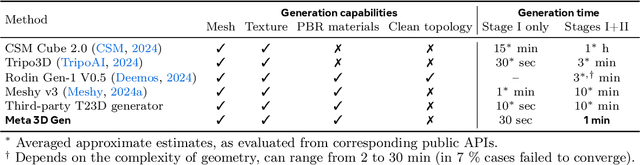

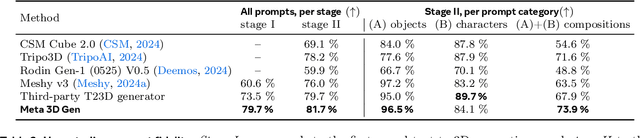
We introduce Meta 3D Gen (3DGen), a new state-of-the-art, fast pipeline for text-to-3D asset generation. 3DGen offers 3D asset creation with high prompt fidelity and high-quality 3D shapes and textures in under a minute. It supports physically-based rendering (PBR), necessary for 3D asset relighting in real-world applications. Additionally, 3DGen supports generative retexturing of previously generated (or artist-created) 3D shapes using additional textual inputs provided by the user. 3DGen integrates key technical components, Meta 3D AssetGen and Meta 3D TextureGen, that we developed for text-to-3D and text-to-texture generation, respectively. By combining their strengths, 3DGen represents 3D objects simultaneously in three ways: in view space, in volumetric space, and in UV (or texture) space. The integration of these two techniques achieves a win rate of 68% with respect to the single-stage model. We compare 3DGen to numerous industry baselines, and show that it outperforms them in terms of prompt fidelity and visual quality for complex textual prompts, while being significantly faster.
Meta 3D AssetGen: Text-to-Mesh Generation with High-Quality Geometry, Texture, and PBR Materials
Jul 02, 2024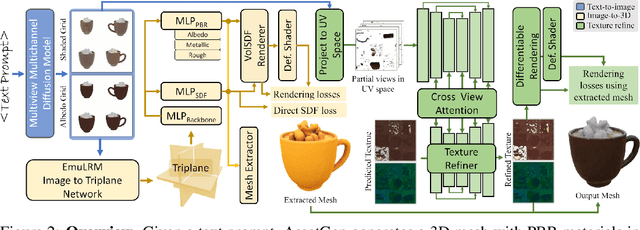
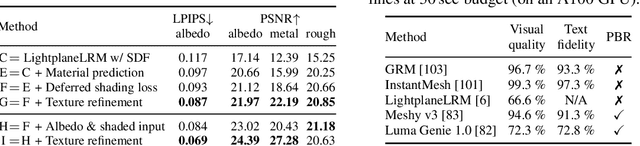
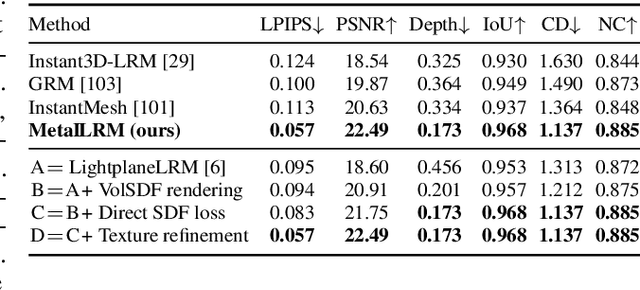
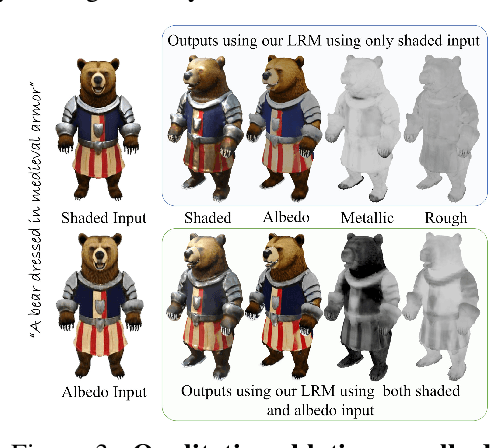
We present Meta 3D AssetGen (AssetGen), a significant advancement in text-to-3D generation which produces faithful, high-quality meshes with texture and material control. Compared to works that bake shading in the 3D object's appearance, AssetGen outputs physically-based rendering (PBR) materials, supporting realistic relighting. AssetGen generates first several views of the object with factored shaded and albedo appearance channels, and then reconstructs colours, metalness and roughness in 3D, using a deferred shading loss for efficient supervision. It also uses a sign-distance function to represent 3D shape more reliably and introduces a corresponding loss for direct shape supervision. This is implemented using fused kernels for high memory efficiency. After mesh extraction, a texture refinement transformer operating in UV space significantly improves sharpness and details. AssetGen achieves 17% improvement in Chamfer Distance and 40% in LPIPS over the best concurrent work for few-view reconstruction, and a human preference of 72% over the best industry competitors of comparable speed, including those that support PBR. Project page with generated assets: https://assetgen.github.io
Replay: Multi-modal Multi-view Acted Videos for Casual Holography
Jul 22, 2023We introduce Replay, a collection of multi-view, multi-modal videos of humans interacting socially. Each scene is filmed in high production quality, from different viewpoints with several static cameras, as well as wearable action cameras, and recorded with a large array of microphones at different positions in the room. Overall, the dataset contains over 4000 minutes of footage and over 7 million timestamped high-resolution frames annotated with camera poses and partially with foreground masks. The Replay dataset has many potential applications, such as novel-view synthesis, 3D reconstruction, novel-view acoustic synthesis, human body and face analysis, and training generative models. We provide a benchmark for training and evaluating novel-view synthesis, with two scenarios of different difficulty. Finally, we evaluate several baseline state-of-the-art methods on the new benchmark.
Novel-View Acoustic Synthesis
Jan 23, 2023



We introduce the novel-view acoustic synthesis (NVAS) task: given the sight and sound observed at a source viewpoint, can we synthesize the sound of that scene from an unseen target viewpoint? We propose a neural rendering approach: Visually-Guided Acoustic Synthesis (ViGAS) network that learns to synthesize the sound of an arbitrary point in space by analyzing the input audio-visual cues. To benchmark this task, we collect two first-of-their-kind large-scale multi-view audio-visual datasets, one synthetic and one real. We show that our model successfully reasons about the spatial cues and synthesizes faithful audio on both datasets. To our knowledge, this work represents the very first formulation, dataset, and approach to solve the novel-view acoustic synthesis task, which has exciting potential applications ranging from AR/VR to art and design. Unlocked by this work, we believe that the future of novel-view synthesis is in multi-modal learning from videos.
Common Pets in 3D: Dynamic New-View Synthesis of Real-Life Deformable Categories
Nov 07, 2022



Obtaining photorealistic reconstructions of objects from sparse views is inherently ambiguous and can only be achieved by learning suitable reconstruction priors. Earlier works on sparse rigid object reconstruction successfully learned such priors from large datasets such as CO3D. In this paper, we extend this approach to dynamic objects. We use cats and dogs as a representative example and introduce Common Pets in 3D (CoP3D), a collection of crowd-sourced videos showing around 4,200 distinct pets. CoP3D is one of the first large-scale datasets for benchmarking non-rigid 3D reconstruction "in the wild". We also propose Tracker-NeRF, a method for learning 4D reconstruction from our dataset. At test time, given a small number of video frames of an unseen object, Tracker-NeRF predicts the trajectories of its 3D points and generates new views, interpolating viewpoint and time. Results on CoP3D reveal significantly better non-rigid new-view synthesis performance than existing baselines.
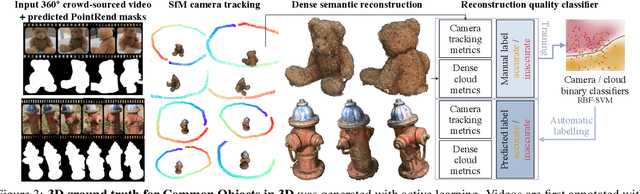
Common Objects in 3D: Large-Scale Learning and Evaluation of Real-life 3D Category Reconstruction
Sep 01, 2021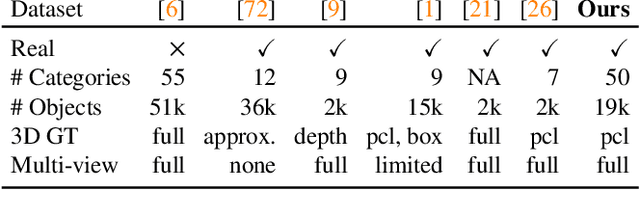
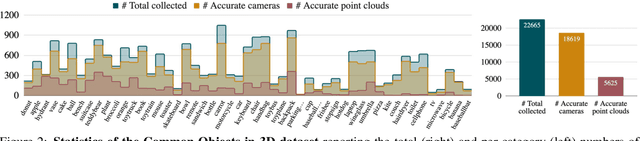
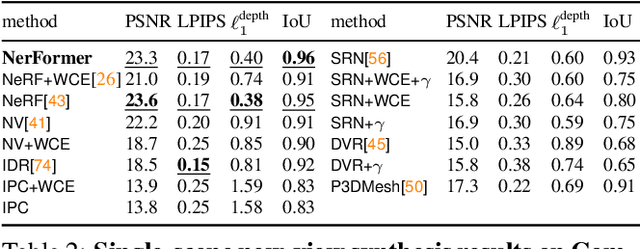
Traditional approaches for learning 3D object categories have been predominantly trained and evaluated on synthetic datasets due to the unavailability of real 3D-annotated category-centric data. Our main goal is to facilitate advances in this field by collecting real-world data in a magnitude similar to the existing synthetic counterparts. The principal contribution of this work is thus a large-scale dataset, called Common Objects in 3D, with real multi-view images of object categories annotated with camera poses and ground truth 3D point clouds. The dataset contains a total of 1.5 million frames from nearly 19,000 videos capturing objects from 50 MS-COCO categories and, as such, it is significantly larger than alternatives both in terms of the number of categories and objects. We exploit this new dataset to conduct one of the first large-scale "in-the-wild" evaluations of several new-view-synthesis and category-centric 3D reconstruction methods. Finally, we contribute NerFormer - a novel neural rendering method that leverages the powerful Transformer to reconstruct an object given a small number of its views. The CO3D dataset is available at https://github.com/facebookresearch/co3d .