 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVGRP-Bench: Visual Grid Reasoning Puzzle Benchmark for Large Vision-Language Models
Apr 02, 2025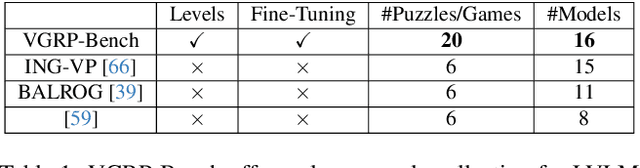
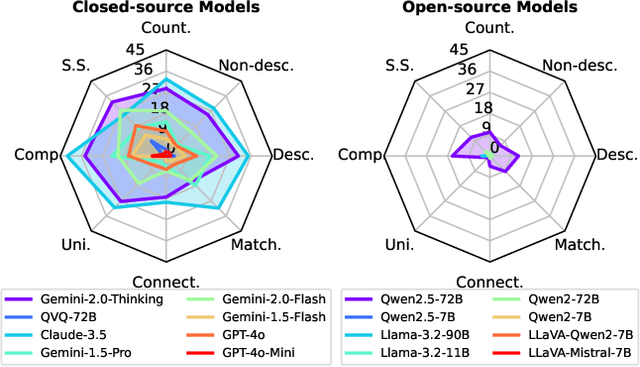
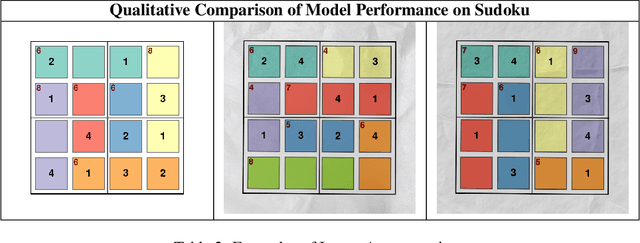
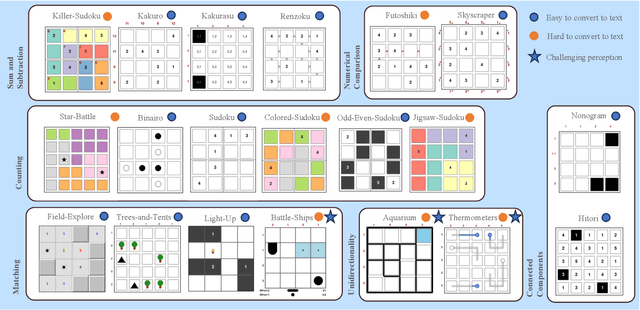
Large Vision-Language Models (LVLMs) struggle with puzzles, which require precise perception, rule comprehension, and logical reasoning. Assessing and enhancing their performance in this domain is crucial, as it reflects their ability to engage in structured reasoning - an essential skill for real-world problem-solving. However, existing benchmarks primarily evaluate pre-trained models without additional training or fine-tuning, often lack a dedicated focus on reasoning, and fail to establish a systematic evaluation framework. To address these limitations, we introduce VGRP-Bench, a Visual Grid Reasoning Puzzle Benchmark featuring 20 diverse puzzles. VGRP-Bench spans multiple difficulty levels, and includes extensive experiments not only on existing chat LVLMs (e.g., GPT-4o), but also on reasoning LVLMs (e.g., Gemini-Thinking). Our results reveal that even the state-of-the-art LVLMs struggle with these puzzles, highlighting fundamental limitations in their puzzle-solving capabilities. Most importantly, through systematic experiments, we identify and analyze key factors influencing LVLMs' puzzle-solving performance, including the number of clues, grid size, and rule complexity. Furthermore, we explore two Supervised Fine-Tuning (SFT) strategies that can be used in post-training: SFT on solutions (S-SFT) and SFT on synthetic reasoning processes (R-SFT). While both methods significantly improve performance on trained puzzles, they exhibit limited generalization to unseen ones. We will release VGRP-Bench to facilitate further research on LVLMs for complex, real-world problem-solving. Project page: https://yufan-ren.com/subpage/VGRP-Bench/.
UnCommon Objects in 3D
Jan 13, 2025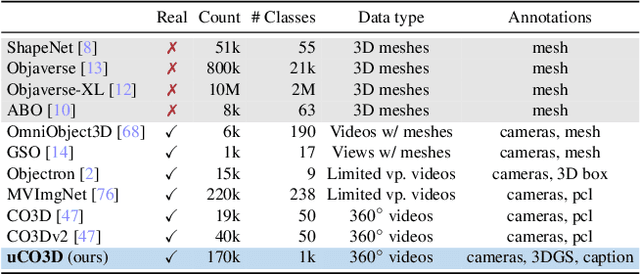
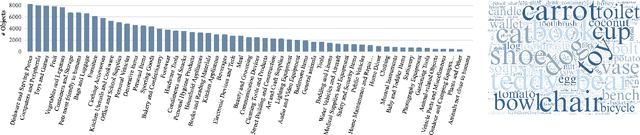
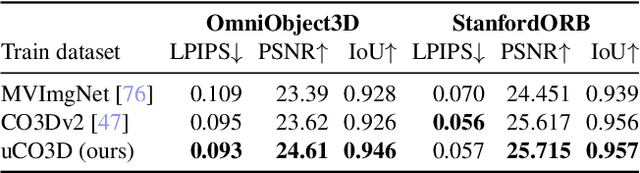
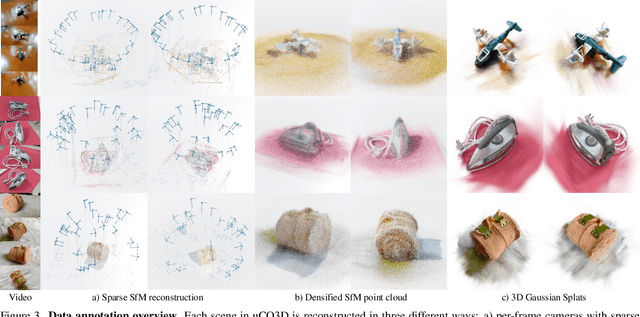
We introduce Uncommon Objects in 3D (uCO3D), a new object-centric dataset for 3D deep learning and 3D generative AI. uCO3D is the largest publicly-available collection of high-resolution videos of objects with 3D annotations that ensures full-360$^{\circ}$ coverage. uCO3D is significantly more diverse than MVImgNet and CO3Dv2, covering more than 1,000 object categories. It is also of higher quality, due to extensive quality checks of both the collected videos and the 3D annotations. Similar to analogous datasets, uCO3D contains annotations for 3D camera poses, depth maps and sparse point clouds. In addition, each object is equipped with a caption and a 3D Gaussian Splat reconstruction. We train several large 3D models on MVImgNet, CO3Dv2, and uCO3D and obtain superior results using the latter, showing that uCO3D is better for learning applications.
PartNeRF: Generating Part-Aware Editable 3D Shapes without 3D Supervision
Mar 21, 2023Impressive progress in generative models and implicit representations gave rise to methods that can generate 3D shapes of high quality. However, being able to locally control and edit shapes is another essential property that can unlock several content creation applications. Local control can be achieved with part-aware models, but existing methods require 3D supervision and cannot produce textures. In this work, we devise PartNeRF, a novel part-aware generative model for editable 3D shape synthesis that does not require any explicit 3D supervision. Our model generates objects as a set of locally defined NeRFs, augmented with an affine transformation. This enables several editing operations such as applying transformations on parts, mixing parts from different objects etc. To ensure distinct, manipulable parts we enforce a hard assignment of rays to parts that makes sure that the color of each ray is only determined by a single NeRF. As a result, altering one part does not affect the appearance of the others. Evaluations on various ShapeNet categories demonstrate the ability of our model to generate editable 3D objects of improved fidelity, compared to previous part-based generative approaches that require 3D supervision or models relying on NeRFs.
Making Better Mistakes: Leveraging Class Hierarchies with Deep Networks
Dec 19, 2019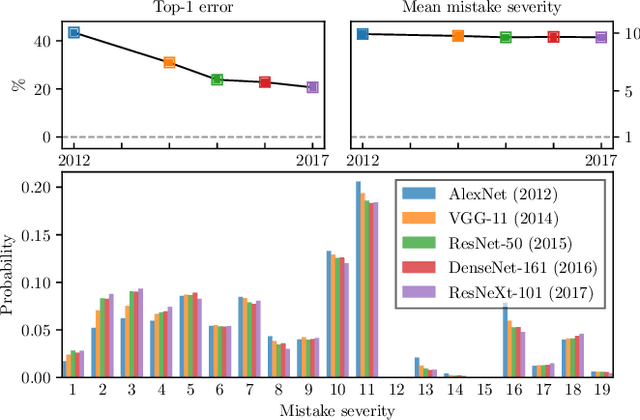
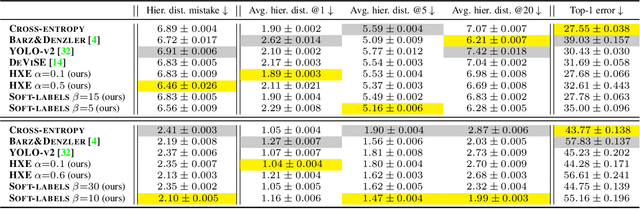
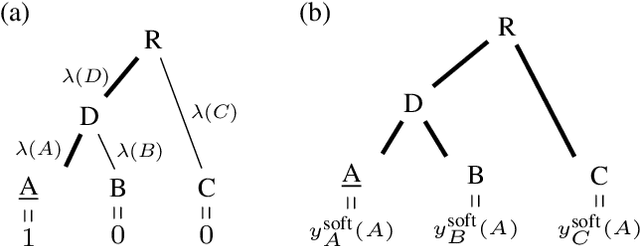
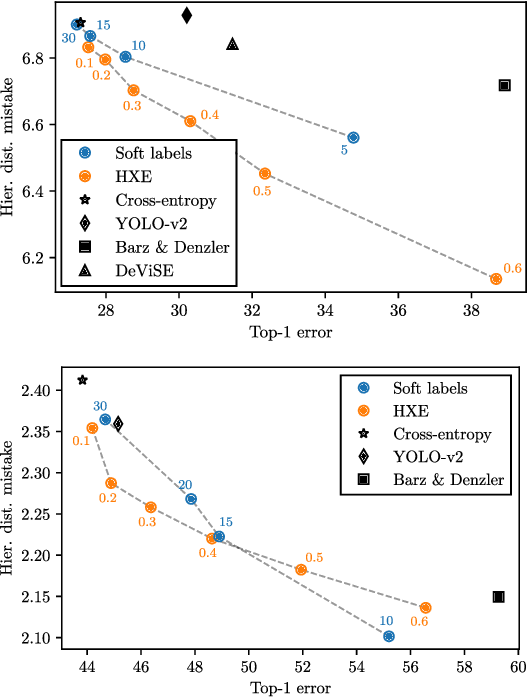
Deep neural networks have improved image classification dramatically over the past decade, but have done so by focusing on performance measures that treat all classes other than the ground truth as equally wrong. This has led to a situation in which mistakes are less likely to be made than before, but are equally likely to be absurd or catastrophic when they do occur. Past works have recognised and tried to address this issue of mistake severity, often by using graph distances in class hierarchies, but this has largely been neglected since the advent of the current deep learning era in computer vision. In this paper, we aim to renew interest in this problem by reviewing past approaches and proposing two simple modifications of the cross-entropy loss which outperform the prior art under several metrics on two large datasets with complex class hierarchies: tieredImageNet and iNaturalist19.
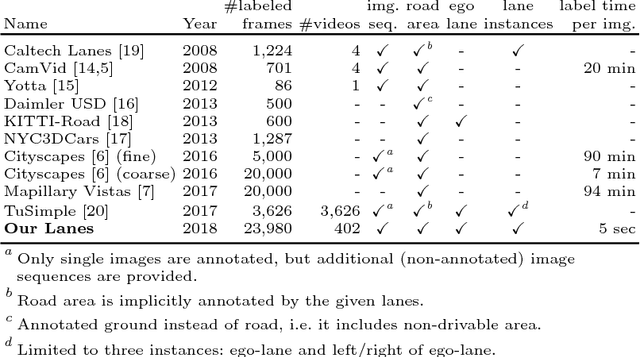
A Dataset for Lane Instance Segmentation in Urban Environments
Aug 02, 2018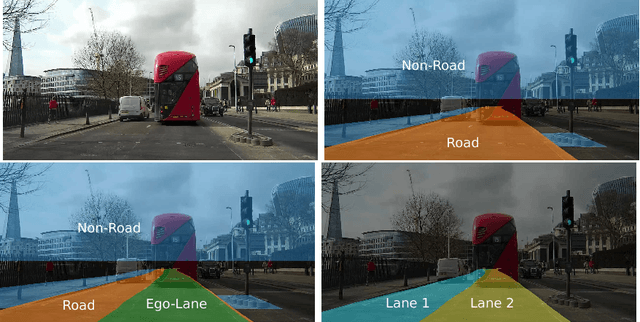

Autonomous vehicles require knowledge of the surrounding road layout, which can be predicted by state-of-the-art CNNs. This work addresses the current lack of data for determining lane instances, which are needed for various driving manoeuvres. The main issue is the time-consuming manual labelling process, typically applied per image. We notice that driving the car is itself a form of annotation. Therefore, we propose a semi-automated method that allows for efficient labelling of image sequences by utilising an estimated road plane in 3D based on where the car has driven and projecting labels from this plane into all images of the sequence. The average labelling time per image is reduced to 5 seconds and only an inexpensive dash-cam is required for data capture. We are releasing a dataset of 24,000 images and additionally show experimental semantic segmentation and instance segmentation results.