 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZipMap: Linear-Time Stateful 3D Reconstruction with Test-Time Training
Mar 04, 2026Feed-forward transformer models have driven rapid progress in 3D vision, but state-of-the-art methods such as VGGT and $π^3$ have a computational cost that scales quadratically with the number of input images, making them inefficient when applied to large image collections. Sequential-reconstruction approaches reduce this cost but sacrifice reconstruction quality. We introduce ZipMap, a stateful feed-forward model that achieves linear-time, bidirectional 3D reconstruction while matching or surpassing the accuracy of quadratic-time methods. ZipMap employs test-time training layers to zip an entire image collection into a compact hidden scene state in a single forward pass, enabling reconstruction of over 700 frames in under 10 seconds on a single H100 GPU, more than $20\times$ faster than state-of-the-art methods such as VGGT. Moreover, we demonstrate the benefits of having a stateful representation in real-time scene-state querying and its extension to sequential streaming reconstruction.
VLIC: Vision-Language Models As Perceptual Judges for Human-Aligned Image Compression
Dec 17, 2025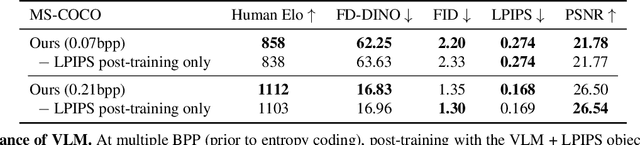
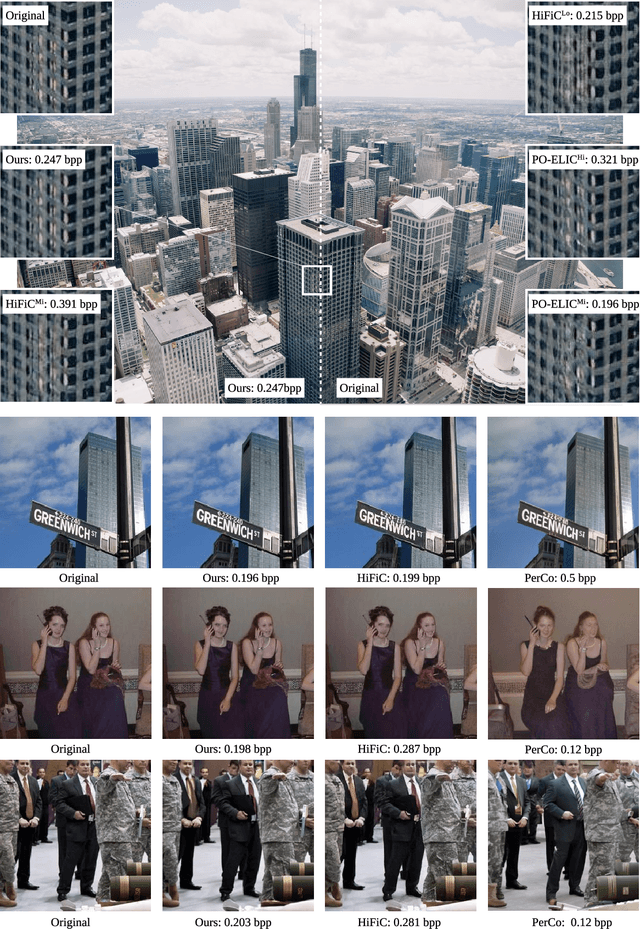
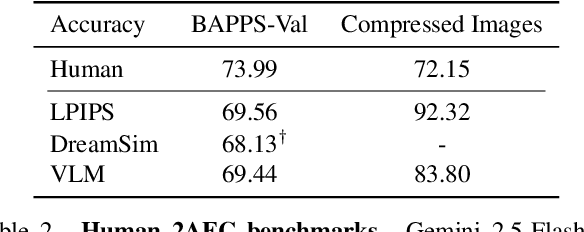
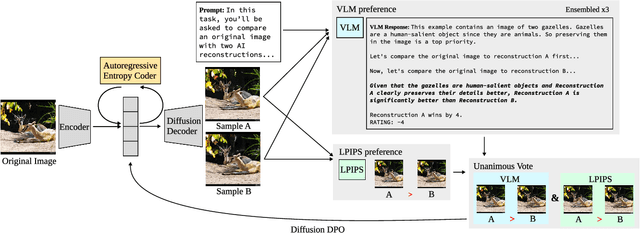
Evaluations of image compression performance which include human preferences have generally found that naive distortion functions such as MSE are insufficiently aligned to human perception. In order to align compression models to human perception, prior work has employed differentiable perceptual losses consisting of neural networks calibrated on large-scale datasets of human psycho-visual judgments. We show that, surprisingly, state-of-the-art vision-language models (VLMs) can replicate binary human two-alternative forced choice (2AFC) judgments zero-shot when asked to reason about the differences between pairs of images. Motivated to exploit the powerful zero-shot visual reasoning capabilities of VLMs, we propose Vision-Language Models for Image Compression (VLIC), a diffusion-based image compression system designed to be post-trained with binary VLM judgments. VLIC leverages existing techniques for diffusion model post-training with preferences, rather than distilling the VLM judgments into a separate perceptual loss network. We show that calibrating this system on VLM judgments produces competitive or state-of-the-art performance on human-aligned visual compression depending on the dataset, according to perceptual metrics and large-scale user studies. We additionally conduct an extensive analysis of the VLM-based reward design and training procedure and share important insights. More visuals are available at https://kylesargent.github.io/vlic
How Animals Dance (When You're Not Looking)
May 29, 2025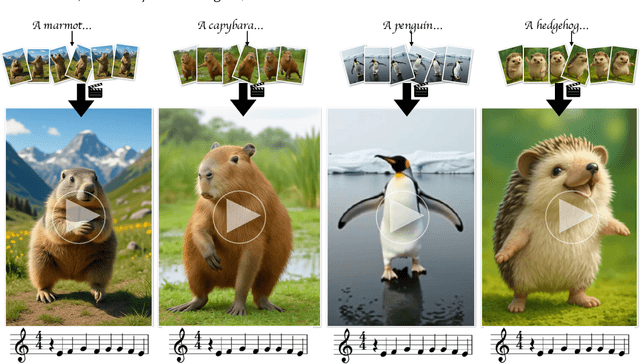
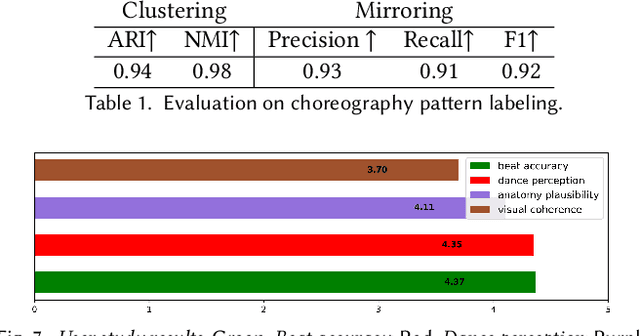

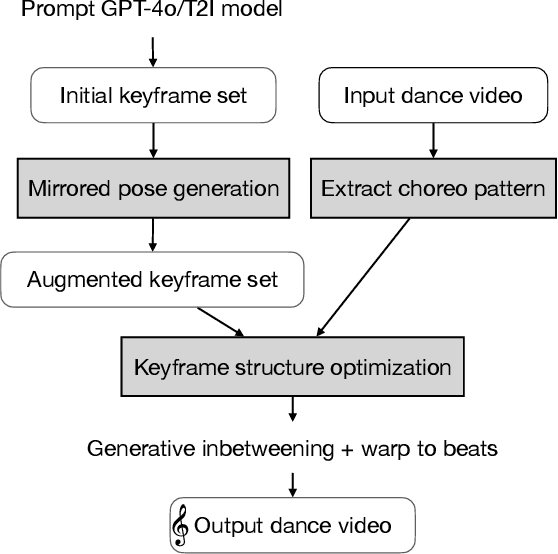
We present a keyframe-based framework for generating music-synchronized, choreography aware animal dance videos. Starting from a few keyframes representing distinct animal poses -- generated via text-to-image prompting or GPT-4o -- we formulate dance synthesis as a graph optimization problem: find the optimal keyframe structure that satisfies a specified choreography pattern of beats, which can be automatically estimated from a reference dance video. We also introduce an approach for mirrored pose image generation, essential for capturing symmetry in dance. In-between frames are synthesized using an video diffusion model. With as few as six input keyframes, our method can produce up to 30 second dance videos across a wide range of animals and music tracks.
Bolt3D: Generating 3D Scenes in Seconds
Mar 18, 2025We present a latent diffusion model for fast feed-forward 3D scene generation. Given one or more images, our model Bolt3D directly samples a 3D scene representation in less than seven seconds on a single GPU. We achieve this by leveraging powerful and scalable existing 2D diffusion network architectures to produce consistent high-fidelity 3D scene representations. To train this model, we create a large-scale multiview-consistent dataset of 3D geometry and appearance by applying state-of-the-art dense 3D reconstruction techniques to existing multiview image datasets. Compared to prior multiview generative models that require per-scene optimization for 3D reconstruction, Bolt3D reduces the inference cost by a factor of up to 300 times.
GPS as a Control Signal for Image Generation
Jan 21, 2025We show that the GPS tags contained in photo metadata provide a useful control signal for image generation. We train GPS-to-image models and use them for tasks that require a fine-grained understanding of how images vary within a city. In particular, we train a diffusion model to generate images conditioned on both GPS and text. The learned model generates images that capture the distinctive appearance of different neighborhoods, parks, and landmarks. We also extract 3D models from 2D GPS-to-image models through score distillation sampling, using GPS conditioning to constrain the appearance of the reconstruction from each viewpoint. Our evaluations suggest that our GPS-conditioned models successfully learn to generate images that vary based on location, and that GPS conditioning improves estimated 3D structure.
Continuous 3D Perception Model with Persistent State
Jan 21, 2025We present a unified framework capable of solving a broad range of 3D tasks. Our approach features a stateful recurrent model that continuously updates its state representation with each new observation. Given a stream of images, this evolving state can be used to generate metric-scale pointmaps (per-pixel 3D points) for each new input in an online fashion. These pointmaps reside within a common coordinate system, and can be accumulated into a coherent, dense scene reconstruction that updates as new images arrive. Our model, called CUT3R (Continuous Updating Transformer for 3D Reconstruction), captures rich priors of real-world scenes: not only can it predict accurate pointmaps from image observations, but it can also infer unseen regions of the scene by probing at virtual, unobserved views. Our method is simple yet highly flexible, naturally accepting varying lengths of images that may be either video streams or unordered photo collections, containing both static and dynamic content. We evaluate our method on various 3D/4D tasks and demonstrate competitive or state-of-the-art performance in each. Project Page: https://cut3r.github.io/
Stereo4D: Learning How Things Move in 3D from Internet Stereo Videos
Dec 12, 2024Learning to understand dynamic 3D scenes from imagery is crucial for applications ranging from robotics to scene reconstruction. Yet, unlike other problems where large-scale supervised training has enabled rapid progress, directly supervising methods for recovering 3D motion remains challenging due to the fundamental difficulty of obtaining ground truth annotations. We present a system for mining high-quality 4D reconstructions from internet stereoscopic, wide-angle videos. Our system fuses and filters the outputs of camera pose estimation, stereo depth estimation, and temporal tracking methods into high-quality dynamic 3D reconstructions. We use this method to generate large-scale data in the form of world-consistent, pseudo-metric 3D point clouds with long-term motion trajectories. We demonstrate the utility of this data by training a variant of DUSt3R to predict structure and 3D motion from real-world image pairs, showing that training on our reconstructed data enables generalization to diverse real-world scenes. Project page: https://stereo4d.github.io
SimVS: Simulating World Inconsistencies for Robust View Synthesis
Dec 10, 2024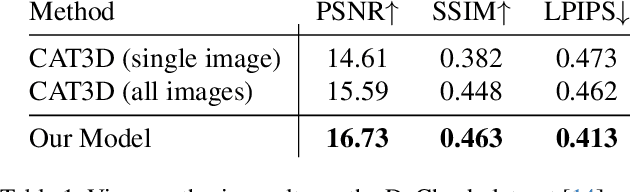


Novel-view synthesis techniques achieve impressive results for static scenes but struggle when faced with the inconsistencies inherent to casual capture settings: varying illumination, scene motion, and other unintended effects that are difficult to model explicitly. We present an approach for leveraging generative video models to simulate the inconsistencies in the world that can occur during capture. We use this process, along with existing multi-view datasets, to create synthetic data for training a multi-view harmonization network that is able to reconcile inconsistent observations into a consistent 3D scene. We demonstrate that our world-simulation strategy significantly outperforms traditional augmentation methods in handling real-world scene variations, thereby enabling highly accurate static 3D reconstructions in the presence of a variety of challenging inconsistencies. Project page: https://alextrevithick.github.io/simvs
MegaSaM: Accurate, Fast, and Robust Structure and Motion from Casual Dynamic Videos
Dec 05, 2024



We present a system that allows for accurate, fast, and robust estimation of camera parameters and depth maps from casual monocular videos of dynamic scenes. Most conventional structure from motion and monocular SLAM techniques assume input videos that feature predominantly static scenes with large amounts of parallax. Such methods tend to produce erroneous estimates in the absence of these conditions. Recent neural network-based approaches attempt to overcome these challenges; however, such methods are either computationally expensive or brittle when run on dynamic videos with uncontrolled camera motion or unknown field of view. We demonstrate the surprising effectiveness of a deep visual SLAM framework: with careful modifications to its training and inference schemes, this system can scale to real-world videos of complex dynamic scenes with unconstrained camera paths, including videos with little camera parallax. Extensive experiments on both synthetic and real videos demonstrate that our system is significantly more accurate and robust at camera pose and depth estimation when compared with prior and concurrent work, with faster or comparable running times. See interactive results on our project page: https://mega-sam.github.io/
CAT4D: Create Anything in 4D with Multi-View Video Diffusion Models
Nov 27, 2024



We present CAT4D, a method for creating 4D (dynamic 3D) scenes from monocular video. CAT4D leverages a multi-view video diffusion model trained on a diverse combination of datasets to enable novel view synthesis at any specified camera poses and timestamps. Combined with a novel sampling approach, this model can transform a single monocular video into a multi-view video, enabling robust 4D reconstruction via optimization of a deformable 3D Gaussian representation. We demonstrate competitive performance on novel view synthesis and dynamic scene reconstruction benchmarks, and highlight the creative capabilities for 4D scene generation from real or generated videos. See our project page for results and interactive demos: \url{cat-4d.github.io}.